Help With Z-Axis Config
- gardenweazel
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 197
- Thank you received: 10
17 Mar 2024 20:31 #296153
by gardenweazel
Help With Z-Axis Config was created by gardenweazel
What did I do wrong on this Z -Axis configuration?
180mm travel distance. Single limit/home switch at the top. Positive travels towards switch at the top and negative travels towards the bottom.
[AXIS_Z]
MAX_VELOCITY = 12.0
MAX_ACCELERATION = 120.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
[JOINT_3]
TYPE = LINEAR
HOME = 8.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 20.0
MAX_ACCELERATION = 120.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 25
STEPGEN_MAXACCEL = 150.00
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -320.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
HOME_OFFSET = -3.200000
HOME_SEARCH_VEL = 2.400000
HOME_LATCH_VEL = -0.020000
HOME_FINAL_VEL = 2.800000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
*******************
# AXIS Z JOINT 3
#*******************
setp pid.z.Pgain [JOINT_3]P
setp pid.z.Igain [JOINT_3]I
setp pid.z.Dgain [JOINT_3]D
setp pid.z.bias [JOINT_3]BIAS
setp pid.z.FF0 [JOINT_3]FF0
setp pid.z.FF1 [JOINT_3]FF1
setp pid.z.FF2 [JOINT_3]FF2
setp pid.z.deadband [JOINT_3]DEADBAND
setp pid.z.maxoutput [JOINT_3]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.03.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i76e.0.stepgen.03.dirhold [JOINT_3]DIRHOLD
setp hm2_7i76e.0.stepgen.03.steplen [JOINT_3]STEPLEN
setp hm2_7i76e.0.stepgen.03.stepspace [JOINT_3]STEPSPACE
setp hm2_7i76e.0.stepgen.03.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i76e.0.stepgen.03.step_type 0
setp hm2_7i76e.0.stepgen.03.control-type 1
setp hm2_7i76e.0.stepgen.03.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.03.maxvel [JOINT_3]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.3.motor-pos-cmd
net z-vel-cmd <= joint.3.vel-cmd
net z-output => hm2_7i76e.0.stepgen.03.velocity-cmd
net z-pos-fb <= hm2_7i76e.0.stepgen.03.position-fb
net z-pos-fb => joint.3.motor-pos-fb
net z-enable <= joint.3.amp-enable-out
net z-enable => hm2_7i76e.0.stepgen.03.enable
# ---setup home / limit switch signals---
net max-home-z => joint.3.home-sw-in
net max-home-z => joint.3.pos-lim-sw-in
net z-neg-limit => joint.3.neg-lim-sw-in
180mm travel distance. Single limit/home switch at the top. Positive travels towards switch at the top and negative travels towards the bottom.
[AXIS_Z]
MAX_VELOCITY = 12.0
MAX_ACCELERATION = 120.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
[JOINT_3]
TYPE = LINEAR
HOME = 8.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 20.0
MAX_ACCELERATION = 120.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 25
STEPGEN_MAXACCEL = 150.00
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -320.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
HOME_OFFSET = -3.200000
HOME_SEARCH_VEL = 2.400000
HOME_LATCH_VEL = -0.020000
HOME_FINAL_VEL = 2.800000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
*******************
# AXIS Z JOINT 3
#*******************
setp pid.z.Pgain [JOINT_3]P
setp pid.z.Igain [JOINT_3]I
setp pid.z.Dgain [JOINT_3]D
setp pid.z.bias [JOINT_3]BIAS
setp pid.z.FF0 [JOINT_3]FF0
setp pid.z.FF1 [JOINT_3]FF1
setp pid.z.FF2 [JOINT_3]FF2
setp pid.z.deadband [JOINT_3]DEADBAND
setp pid.z.maxoutput [JOINT_3]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.03.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i76e.0.stepgen.03.dirhold [JOINT_3]DIRHOLD
setp hm2_7i76e.0.stepgen.03.steplen [JOINT_3]STEPLEN
setp hm2_7i76e.0.stepgen.03.stepspace [JOINT_3]STEPSPACE
setp hm2_7i76e.0.stepgen.03.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i76e.0.stepgen.03.step_type 0
setp hm2_7i76e.0.stepgen.03.control-type 1
setp hm2_7i76e.0.stepgen.03.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.03.maxvel [JOINT_3]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.3.motor-pos-cmd
net z-vel-cmd <= joint.3.vel-cmd
net z-output => hm2_7i76e.0.stepgen.03.velocity-cmd
net z-pos-fb <= hm2_7i76e.0.stepgen.03.position-fb
net z-pos-fb => joint.3.motor-pos-fb
net z-enable <= joint.3.amp-enable-out
net z-enable => hm2_7i76e.0.stepgen.03.enable
# ---setup home / limit switch signals---
net max-home-z => joint.3.home-sw-in
net max-home-z => joint.3.pos-lim-sw-in
net z-neg-limit => joint.3.neg-lim-sw-in
Please Log in or Create an account to join the conversation.
- MaHa
- Offline
- Platinum Member
-

Less
More
- Posts: 526
- Thank you received: 231
17 Mar 2024 21:09 #296154
by MaHa
Replied by MaHa on topic Help With Z-Axis Config
Home must be between MIN_LIMIT and MAX_LIMIT
HOME = 8.0 is outside softlimits
HOME = 8.0 is outside softlimits
The following user(s) said Thank You: gardenweazel
Please Log in or Create an account to join the conversation.
- gardenweazel
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 197
- Thank you received: 10
18 Mar 2024 22:41 #296261
by gardenweazel
Replied by gardenweazel on topic Help With Z-Axis Config
Ok, the change has been made to HOME from 8 to -8
Now when I start the file run, when it runs the too change line the Z-Axis moves in the positive direct until it hits the limit switch and then stops.
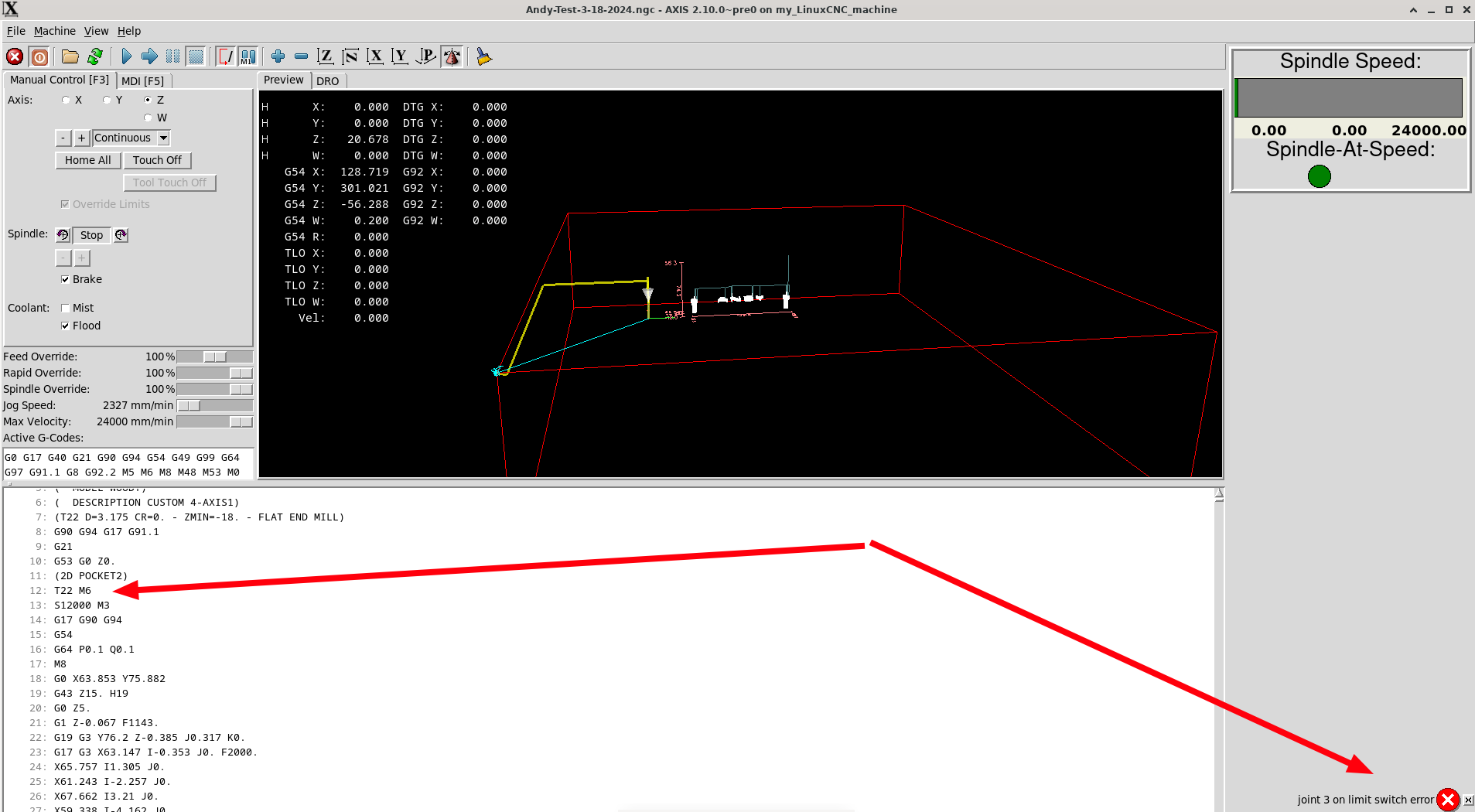
Now when I start the file run, when it runs the too change line the Z-Axis moves in the positive direct until it hits the limit switch and then stops.
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21658
- Thank you received: 7399
18 Mar 2024 23:43 #296263
by tommylight
Replied by tommylight on topic Help With Z-Axis Config
HOME = 0
The following user(s) said Thank You: gardenweazel
Please Log in or Create an account to join the conversation.
- gardenweazel
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 197
- Thank you received: 10
19 Mar 2024 00:40 #296276
by gardenweazel
Replied by gardenweazel on topic Help With Z-Axis Config
Tried that but, it fails immediately when I HOME ALL.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21658
- Thank you received: 7399
19 Mar 2024 03:09 #296286
by tommylight
Replied by tommylight on topic Help With Z-Axis Config
In that case. there is something not right with the configuration of Z axis in the ini file, you must first make it home properly with home set at 0, home offset can probably be -3, but you have to fix home_search_velocity, home_latch_velocity and home_final_velocity so it home properly. All this is done by setting all those to very low values (like 5 for metric) and carefully watching what the Z axis is doing while homing, but first make sure page down on keyboard moves Z axis down, then, when home all is clicked/pressed Z should start moving up, hit limit switch, move down a bit till switch is released, move up again till it hits the switch, then move 3mm down (this is the home offset that you have at -3).
If any of those are not correct, change the value for search, latch, final by adding or removing - in front of the value.
If any of those are not correct, change the value for search, latch, final by adding or removing - in front of the value.
The following user(s) said Thank You: gardenweazel
Please Log in or Create an account to join the conversation.
- gardenweazel
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 197
- Thank you received: 10
19 Mar 2024 23:30 #296350
by gardenweazel
Replied by gardenweazel on topic Help With Z-Axis Config
This is what I currently have, the final move which I assume is HOME_FINAL_VEL travels in the plus direction when it should be going to the negative position. I can't tell you how frustrating this is after 4 months of trial and error. However I do appreciate the help!
MAX_VELOCITY = 12.0
MAX_ACCELERATION = 120.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
[JOINT_3]
TYPE = LINEAR
HOME = 0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 20.0
MAX_ACCELERATION = 120.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 25
STEPGEN_MAXACCEL = 150.00
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -320.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
HOME_OFFSET = -2.00000
HOME_SEARCH_VEL = 3.00000
HOME_LATCH_VEL = 0.20000
HOME_FINAL_VEL = 2.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
MAX_VELOCITY = 12.0
MAX_ACCELERATION = 120.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
[JOINT_3]
TYPE = LINEAR
HOME = 0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 20.0
MAX_ACCELERATION = 120.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 25
STEPGEN_MAXACCEL = 150.00
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = -320.0
MIN_LIMIT = -180.0
MAX_LIMIT = 0
HOME_OFFSET = -2.00000
HOME_SEARCH_VEL = 3.00000
HOME_LATCH_VEL = 0.20000
HOME_FINAL_VEL = 2.000000
HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_SEQUENCE = 0
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21658
- Thank you received: 7399
20 Mar 2024 01:00 #296356
by tommylight
Replied by tommylight on topic Help With Z-Axis Config
No, the final move is the offset, you have it negative, try making it positive by removing - in front of 2.
The following user(s) said Thank You: gardenweazel
Please Log in or Create an account to join the conversation.
- gardenweazel
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 197
- Thank you received: 10
20 Mar 2024 02:49 #296367
by gardenweazel
Replied by gardenweazel on topic Help With Z-Axis Config
Worked!
Thank you so kindly, I appreciate the support.
Thank you so kindly, I appreciate the support.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Time to create page: 0.193 seconds