Double Miter Saw Machine XAB Configuration
- rbobey1989
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 126
- Thank you received: 33
27 Apr 2024 17:40 #299200
by rbobey1989
Double Miter Saw Machine XAB Configuration was created by rbobey1989
I am carrying out an update for a double head saw, I am designing a graphical interface using gladevcp, I intend to add three work modes:1- Manual mode, where the user only enters the length and angle measurements of the heads and the number of pieces to be cut.
2- Automatic Mode, where a cutting list will be obtained from a *.csv file and the cutting will proceed
3- Step and slide mode which will be used to make cuts with the fixed head feeding the profile with the moving head.I still have a lot of work ahead of me with the user interface, then I will upload a video of how it looks.After this introduction, I would like to ask some questions, these machines have up to 5 axes, however those with 3 and 1 axis are more common, I have 2 with only 1 axis, these axes work independently, that is, there is no interpolation between them .According to my reading of the linuxcnc Kinematis documentation, I could use trivkins, using the variable coordinates= XAB then I would only declare the necessary joint sections, I could test it on my EC500 board but if anyone can shed some light on this.I have read some post here on Andypugh LinuxCNC forum:where he talks about using the hal Limit3 component, as motion control for a single axis configuration.If possible, if someone can help, give a way forward, thank you all in advance, greetings
2- Automatic Mode, where a cutting list will be obtained from a *.csv file and the cutting will proceed
3- Step and slide mode which will be used to make cuts with the fixed head feeding the profile with the moving head.I still have a lot of work ahead of me with the user interface, then I will upload a video of how it looks.After this introduction, I would like to ask some questions, these machines have up to 5 axes, however those with 3 and 1 axis are more common, I have 2 with only 1 axis, these axes work independently, that is, there is no interpolation between them .According to my reading of the linuxcnc Kinematis documentation, I could use trivkins, using the variable coordinates= XAB then I would only declare the necessary joint sections, I could test it on my EC500 board but if anyone can shed some light on this.I have read some post here on Andypugh LinuxCNC forum:where he talks about using the hal Limit3 component, as motion control for a single axis configuration.If possible, if someone can help, give a way forward, thank you all in advance, greetings
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4724
- Thank you received: 2117
28 Apr 2024 10:05 #299241
by Aciera
Replied by Aciera on topic Double Miter Saw Machine XAB Configuration
Maybe have a look at the simulation configurations using limit3 in the folder 'configs/sim/axis/extrajoints'
Please Log in or Create an account to join the conversation.
- rbobey1989
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 126
- Thank you received: 33
28 Apr 2024 13:45 #299251
by rbobey1989
Replied by rbobey1989 on topic Double Miter Saw Machine XAB Configuration
thanks for the answer, I've been looking at the extrajoints configurations, I missed something before and that is that I don't need to use GCode, just update the joint.N.motor-pos-cmd values from the GUI so that the joints move to the new measurement, thanks
Please Log in or Create an account to join the conversation.
- rbobey1989
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 126
- Thank you received: 33
28 Apr 2024 18:15 #299266
by rbobey1989
Replied by rbobey1989 on topic Double Miter Saw Machine XAB Configuration
I have more questions, in the case of only using limit3 and pid+stepgen how could I establish the limit switches for each axis? This is within the motion control if I'm not mistaken, well I hope for fresh ideas hehe, greetings
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
29 Apr 2024 07:19 #299299
by Aciera
Replied by Aciera on topic Double Miter Saw Machine XAB Configuration
The limit3 component has pins for min,max output-value, max first derivative and max second derivative (ie in the case of an axis limits can be set for position, velocity and acceleration hence limit'3')
linuxcnc.org/docs/html/man/man9/limit3.9.html
linuxcnc.org/docs/html/man/man9/limit3.9.html
Please Log in or Create an account to join the conversation.
- rbobey1989
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 126
- Thank you received: 33
29 Apr 2024 19:49 #299340
by rbobey1989
Replied by rbobey1989 on topic Double Miter Saw Machine XAB Configuration
Thanks for the answer, I understand how the limit3 component works, what I don't understand is how to configure the physical maximum/minimum and homing limit switches without going through the motion controller, that is, signals like:
joint.N.home-sw-in
joint.N.neg-lim-sw-in
joint.N.pos-lim-sw-in
They lie in motion control and would not be available if you were not using the motion controller.
Don't hesitate to correct me if I'm wrong Aciera, hehe, thanks, I'm waiting for a response.
Greetings to all.
joint.N.home-sw-in
joint.N.neg-lim-sw-in
joint.N.pos-lim-sw-in
They lie in motion control and would not be available if you were not using the motion controller.
Don't hesitate to correct me if I'm wrong Aciera, hehe, thanks, I'm waiting for a response.
Greetings to all.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
30 Apr 2024 06:57 #299375
by Aciera
Replied by Aciera on topic Double Miter Saw Machine XAB Configuration
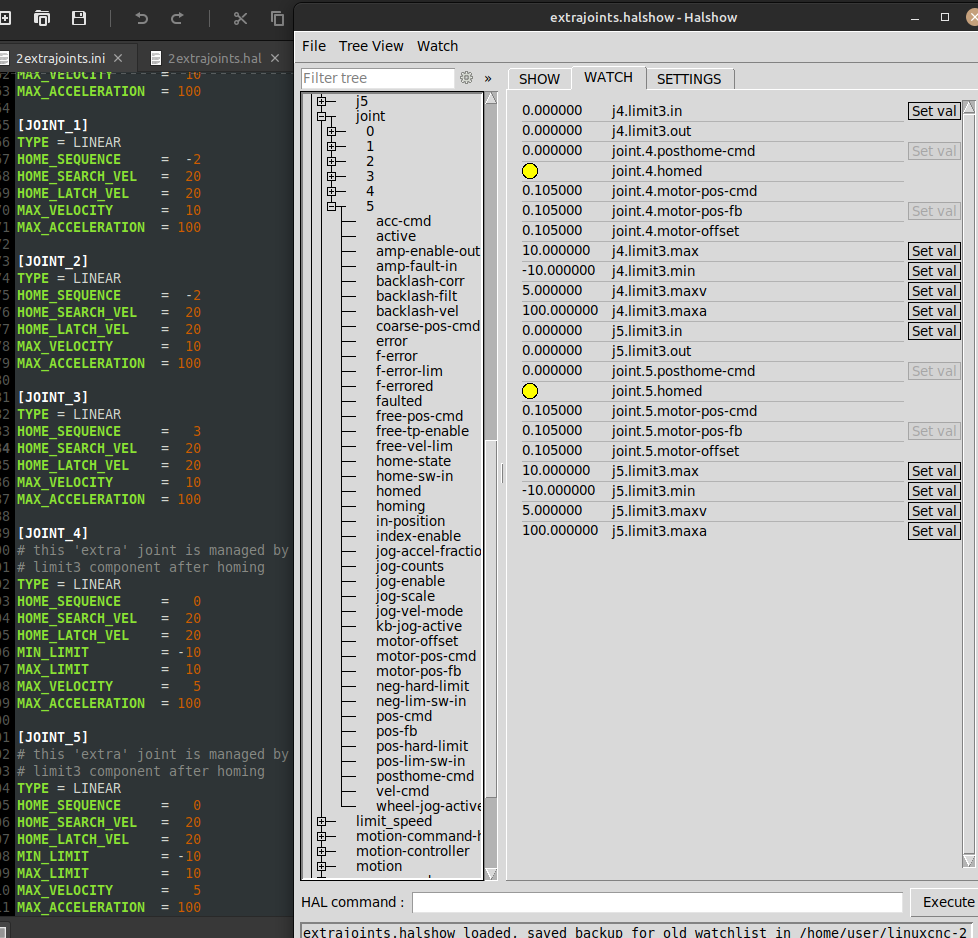
Those are 'joint.' pins and are available for extrajoints. Have a look in the 'Halshow' window that pops up when you run one of the extrajoints sim config:
Attachments:
Please Log in or Create an account to join the conversation.
- rbobey1989
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 126
- Thank you received: 33
30 Apr 2024 16:50 #299408
by rbobey1989
Replied by rbobey1989 on topic Double Miter Saw Machine XAB Configuration
ok, indicative image.
1-So it would be possible to declare an XAB configuration using A and B as extrajoins where these last two joints would still be managed in part by the motion controller?
2-Would it be possible to declare only the joints that I intend to use XAB or would I have to declare the intermediate joints, for example XYZAB?
1-So it would be possible to declare an XAB configuration using A and B as extrajoins where these last two joints would still be managed in part by the motion controller?
2-Would it be possible to declare only the joints that I intend to use XAB or would I have to declare the intermediate joints, for example XYZAB?
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4724
- Thank you received: 2117
01 May 2024 07:55 - 01 May 2024 07:57 #299446
by Aciera
Replied by Aciera on topic Double Miter Saw Machine XAB Configuration
1- Not sure what you mean by 'managed in part by the motion controller'. Extrajoints home in the same way as regular axes do, the softlimits are handled by the limit3 component. Extrajoints do not have an axis letter (eg 'X','A', 'B') associated and are not accessable by gcode.
2- you can only declare the joints you need (eg X). If you want two extrajoints you do not declare 'AB' as that is used for regular axes.
As far as I can see there needs to be at least one regular axis defined (eg X) but I think there is also a way to use only HAL without the motion controller but I don't know how that works.
2- you can only declare the joints you need (eg X). If you want two extrajoints you do not declare 'AB' as that is used for regular axes.
As far as I can see there needs to be at least one regular axis defined (eg X) but I think there is also a way to use only HAL without the motion controller but I don't know how that works.
Last edit: 01 May 2024 07:57 by Aciera.
Please Log in or Create an account to join the conversation.
- rbobey1989
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 126
- Thank you received: 33
02 May 2024 12:37 #299545
by rbobey1989
Replied by rbobey1989 on topic Double Miter Saw Machine XAB Configuration
Once again, I thank you for your response Aciera, you have got the focus of your two responses right, although I am still not clear about the best way to configure everything.
As for my first question and your first answer, that is exactly my question, how to return home the extra joints, in this case they would be home designs with a min limit switch shared with a home switch and it also has a maximum limit switch for the three axes. X A B, all these signals are defined in the motion controller, so this is what I mean when I say that the extra joints would be controlled in part by the motion controller, if it works that way of course.
I have been reading several threads on the forum and it is mentioned that all this can be done using only hal as you mention before, but I can't find any example, especially Andypugh seems to be quite familiar with how to do it, although I have no other way to contact him that is not in the forum.
Attached I leave some photos of the user interface, the idea would be to simply establish a measurement in X of the angles on the right and left heads, press play and the machine positions itself.
I also leave a url about a video of a machine in operation,
Greetings to everyone, if you have any idea how to do this, thank you in advance.
As for my first question and your first answer, that is exactly my question, how to return home the extra joints, in this case they would be home designs with a min limit switch shared with a home switch and it also has a maximum limit switch for the three axes. X A B, all these signals are defined in the motion controller, so this is what I mean when I say that the extra joints would be controlled in part by the motion controller, if it works that way of course.
I have been reading several threads on the forum and it is mentioned that all this can be done using only hal as you mention before, but I can't find any example, especially Andypugh seems to be quite familiar with how to do it, although I have no other way to contact him that is not in the forum.
Attached I leave some photos of the user interface, the idea would be to simply establish a measurement in X of the angles on the right and left heads, press play and the machine positions itself.
I also leave a url about a video of a machine in operation,
Greetings to everyone, if you have any idea how to do this, thank you in advance.
Please Log in or Create an account to join the conversation.
Time to create page: 0.190 seconds