encoder.N.velocity-rpm
- greg23_78
- Offline
- Premium Member
-

Less
More
- Posts: 142
- Thank you received: 7
02 Sep 2024 19:46 - 02 Sep 2024 19:49 #309224
by greg23_78
encoder.N.velocity-rpm was created by greg23_78
I need a little help, I can't get the spindle speed in rpm.
I have a 1024 pulse/revolution encoder on the spindle
The encoder A phase is connected to the hm2_7i97.0.7i84.0.0.input-28
The encoder index pulse is connected to the hm2_7i97.0.7i84.0.0.input-30
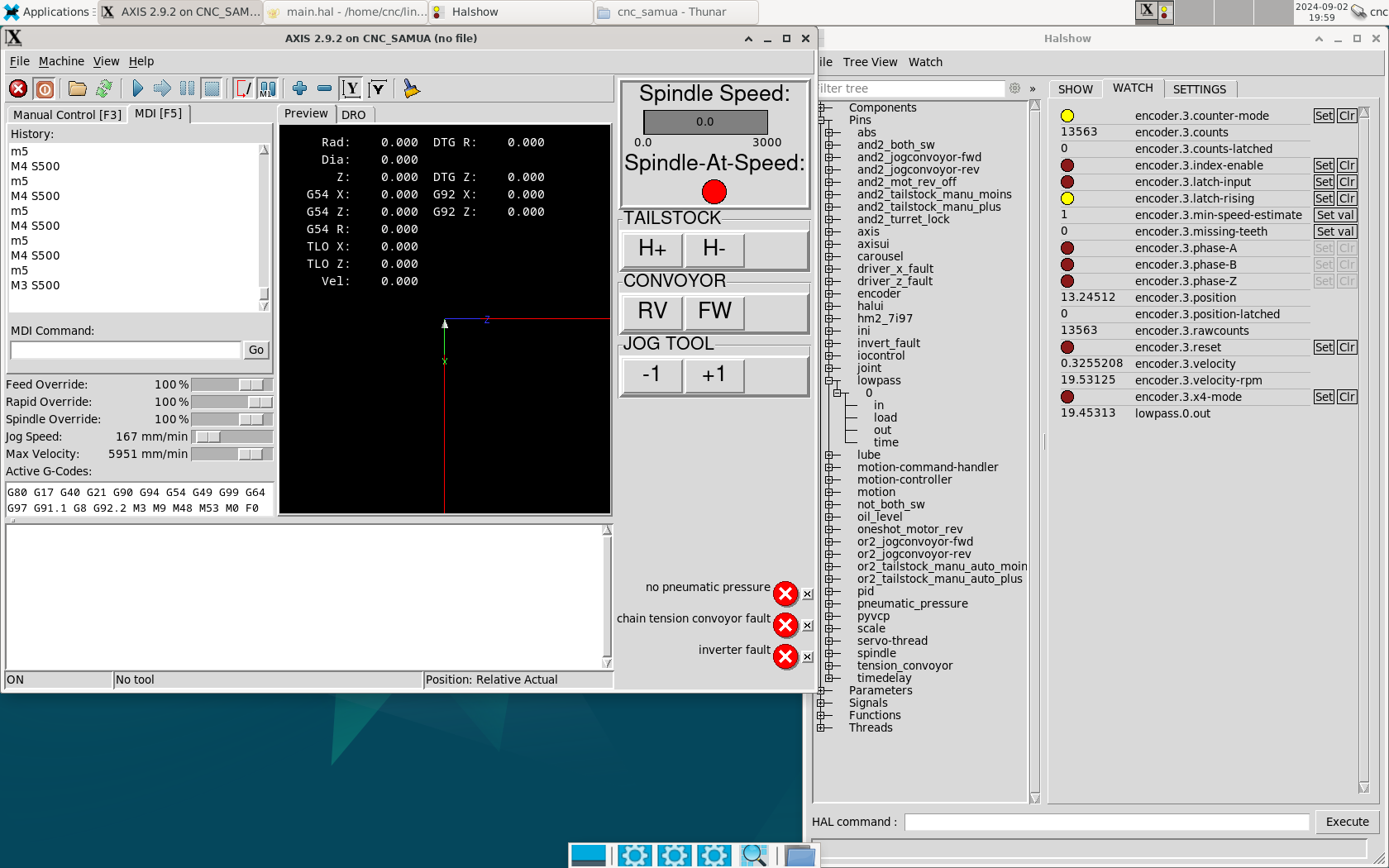
I have the impression that my encoder transmits the pulses correctly, but the value of low.pass.0.out and encoder.0.velocity-rpm is not fixed and displays values from 3 to 19 for a rotation speed of 500 RPM.
what do I need to change ?
INI
HAL
I have a 1024 pulse/revolution encoder on the spindle
The encoder A phase is connected to the hm2_7i97.0.7i84.0.0.input-28
The encoder index pulse is connected to the hm2_7i97.0.7i84.0.0.input-30
I have the impression that my encoder transmits the pulses correctly, but the value of low.pass.0.out and encoder.0.velocity-rpm is not fixed and displays values from 3 to 19 for a rotation speed of 500 RPM.
what do I need to change ?
INI
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2554
ENCODER_SCALE = 1024
OUTPUT_SCALE = 2554
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 2600HAL
# Axis: SPINDLE Joint: 5 Output: 5
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---PWM Generator signals/setup---
setp hm2_[MESA](BOARD).0.pwmgen.05.scale [SPINDLE_0]OUTPUT_SCALE
setp hm2_[MESA](BOARD).0.pwmgen.05.output-type 1
setp hm2_[MESA](BOARD).0.pwmgen.05.offset-mode 1
# ---Encoder feedback signals/setup---
setp encoder.3.position-scale [SPINDLE_0]ENCODER_SCALE
setp encoder.3.counter-mode true
net spindle-position encoder.3.position => spindle.0.revs
#net spindle-velocity encoder.3.velocity => spindle.0.speed-in
setp scale.0.gain 60
setp lowpass.0.gain 1.2
net spindle-velocity-rps encoder.3.velocity => scale.0.in
net spindle-velocity-rpm scale.0.out => abs.0.in
net spindle-velocity-rpm-abs abs.0.out => lowpass.0.in
net spindle-velocity-rpm-abs-filtered lowpass.0.out
net spindle-index-enable encoder.3.index-enable <=> spindle.0.index-enable
net spindle-phase-a encoder.3.phase-A <= hm2_7i97.0.7i84.0.0.input-28
net spindle-phase-b encoder.3.phase-B
net spindle-index encoder.3.phase-Z <= hm2_7i97.0.7i84.0.0.input-30
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-at-speed => spindle.0.at-speed
# ---Setup spindle at speed signal
net spindle-cw => hm2_7i97.0.7i84.0.0.output-05
net spindle-ccw => hm2_7i97.0.7i84.0.0.output-06
net spindle-output => hm2_7i97.0.pwmgen.05.value
net spindle-enable => hm2_7i97.0.pwmgen.05.enableAttachments:
Last edit: 02 Sep 2024 19:49 by greg23_78.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
02 Sep 2024 20:03 #309226
by PCW
Replied by PCW on topic encoder.N.velocity-rpm
You would normally use a 7i97 encoder for this:
net spindle-vel-fb-rps <= hm2_[MESA](BOARD).0.encoder.05.velocity
net spindle-vel-fb-rpm <= hm2_[MESA](BOARD).0.encoder.05.velocity-rpm
net spindle-vel-fb-rps <= hm2_[MESA](BOARD).0.encoder.05.velocity
net spindle-vel-fb-rpm <= hm2_[MESA](BOARD).0.encoder.05.velocity-rpm
Please Log in or Create an account to join the conversation.
- greg23_78
- Offline
- Premium Member
-
Less
More
- Posts: 142
- Thank you received: 7
02 Sep 2024 22:01 #309235
by greg23_78
Replied by greg23_78 on topic encoder.N.velocity-rpm
thank you, it works perfectly except for the spindle speed pyvcp and spindle at speed led, which do not work.
in halcmd spindle at speed work.
in which file are they affected, i created my config with mesact ?
in halcmd spindle at speed work.
in which file are they affected, i created my config with mesact ?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17994
- Thank you received: 5281
03 Sep 2024 03:44 #309250
by PCW
Replied by PCW on topic encoder.N.velocity-rpm
If you post your hal and ini files, I can take a look.
Please Log in or Create an account to join the conversation.
- greg23_78
- Offline
- Premium Member
-
Less
More
- Posts: 142
- Thank you received: 7
03 Sep 2024 06:19 #309265
by greg23_78
Replied by greg23_78 on topic encoder.N.velocity-rpm
HAL
INI
IO
INI
IO
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17994
- Thank you received: 5281
03 Sep 2024 14:56 #309292
by PCW
Replied by PCW on topic encoder.N.velocity-rpm
I'm no pyvcp expert but I don't see any connections from
spindle-at-speed or the actual spindle speed to pyvcp pins
spindle-at-speed or the actual spindle speed to pyvcp pins
Please Log in or Create an account to join the conversation.
Time to create page: 0.202 seconds