Configure the vfdb_vfd driver for direction
- darrylb123
- Offline
- New Member
-

Less
More
- Posts: 13
- Thank you received: 0
10 Nov 2024 06:44 #314176
by darrylb123
Configure the vfdb_vfd driver for direction was created by darrylb123
I am trying to get the vfdb_vfd MODBUS driver working for reversing (M4) . It is otherwise working. Linuxcnc expects some forward/reverse pins but (looking at the source code) vfdb_vfd expects a negative speed number to send a reverse command to the VFD.
My current configuration always send positive numbers and asserts the fwd/rev pins instead.
I can find no reference to configuring linuxcnc to send negative speed numbers to the driver for reverse.
if (*(haldata->speed_command) >= 0) {
cmd1_reg |= CMD_FORWARD;
} else {
cmd1_reg |= CMD_REVERSE;
}
My current configuration always send positive numbers and asserts the fwd/rev pins instead.
I can find no reference to configuring linuxcnc to send negative speed numbers to the driver for reverse.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4724
- Thank you received: 2117
10 Nov 2024 06:48 #314177
by Aciera
Replied by Aciera on topic Configure the vfdb_vfd driver for direction
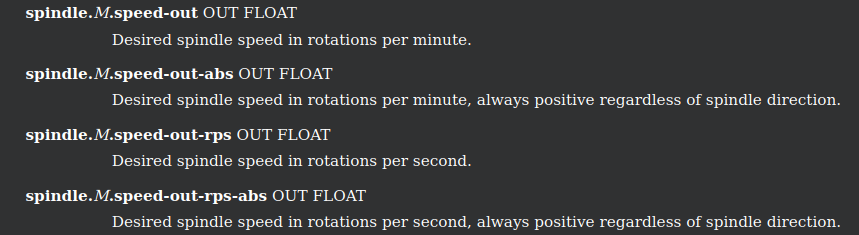
Sounds like you need to change the 'spindle.0.speed-out..-abs' pin in your hal file to the non absolute variant:
Attachments:
Please Log in or Create an account to join the conversation.
- darrylb123
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 0
12 Nov 2024 09:43 #314307
by darrylb123
Replied by darrylb123 on topic Configure the vfdb_vfd driver for direction
Thank you, I read that severat times, but didn't pick up on the significance. Cut and paste examples... After reading your answer, I found it spelt out in the spindle man page. Sigh.
spindle.N.spindle-rpm float out
Current spindle speed in RPM.+ve = forward, -ve = reverse. Uses the encoder input if available. If not, uses a simulated encoder speed.
spindle.N.spindle-rpm float out
Current spindle speed in RPM.+ve = forward, -ve = reverse. Uses the encoder input if available. If not, uses a simulated encoder speed.
Please Log in or Create an account to join the conversation.
Time to create page: 0.134 seconds