LinuxCNC Errors - Help please
- slowpoke
- Offline
- Elite Member
-

Less
More
- Posts: 224
- Thank you received: 28
24 Feb 2024 18:45 #294232
by slowpoke
LinuxCNC Errors - Help please was created by slowpoke
I have LinuxCNC v2.9.2 installed and connected to a Mesa7i95t, via Ethernet cable. I ran MesaCT v2.1.2 and have configured most of the settings, likely enough to exercise at least the X axis.The jumpers for the IP address are down, up for EEPROM, so should be default 10.10.10.10, and when in MesaCT, the IP address is set to 10.10.10.10. When I click on Check Config, I get Configuration checked OK, I'm not sure if I need to send this to the Mesa board or if that happens transparently as you make changes?I have a configuration in /home/jeff/linuxcnc/configs/7i95t_xyz/and in that folder I have main.hal, io.hal, 7i95t_xyx.ini, tool.tbl and parameters.varWhen I attempt to start LinuxCNC, I get errors. I have attached the linuxcnc.report. It seems to indicate that LinuxCNC is not communicating with the Mesa board, but that might just be a symptom of another problem.
One other note up in the top right corner there is a spinning circle icon that appears to be associated with the wired connection to the Mesa board.
Please advise, and thanks in advance for the support.
One other note up in the top right corner there is a spinning circle icon that appears to be associated with the wired connection to the Mesa board.
Please advise, and thanks in advance for the support.
Attachments:
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12032
- Thank you received: 4104
24 Feb 2024 19:02 #294233
by rodw
Replied by rodw on topic LinuxCNC Errors - Help please
Looks like you don't have your networking set up right
Please watch this
Please watch this
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21738
- Thank you received: 7428
24 Feb 2024 19:32 #294236
by tommylight
Replied by tommylight on topic LinuxCNC Errors - Help please
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
24 Feb 2024 20:24 #294248
by slowpoke
Replied by slowpoke on topic LinuxCNC Errors - Help please
rodw, correct, after I setup as per link below yours LinuxCnc starts, I'm going to watch the remainder of the video now, thank you.
tommylight, easy when you have the instructions, thank you.
tommylight, easy when you have the instructions, thank you.
The following user(s) said Thank You: tommylight, rodw
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12032
- Thank you received: 4104
24 Feb 2024 20:28 #294249
by rodw
Replied by rodw on topic LinuxCNC Errors - Help please
Great! There was a time when you had to know what I covered in the video the moment you created a network. But today, its been automated and hidden from the user. Just another example where technology has deskilled the worker!rodw, correct, after I setup as per link below yours LinuxCnc starts, I'm going to watch the remainder of the video now, thank you.
tommylight, easy when you have the instructions, thank you.
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
25 Feb 2024 16:16 - 25 Feb 2024 16:17 #294391
by slowpoke
Replied by slowpoke on topic LinuxCNC Errors - Help please
Rod,
I just watched the video in your link, I assume that's you in the video?
Very helpful particularly the short segment on networking, I'm strong with electronics, know next to nothing about networking and I will make time to learn more as this has been a perennial problem and I need to learn more.
Now that LinuxCNC runs and communicates with the Mesaboard verified by connecting an E-Stop button to an input and seeing it trigger in LinuxCNC when I operate the switch.
My next step might be a bit tricky, let me explain......
I'm using four ac servos to drive the various joints, X, Y, Z(quill), and U(knee)
For the moment I just want to get some motion on X.
The ac servo drivers I'm using (T6), have tuning software that I have used to configure the PID loop that is controlled internal to the T6 driver. The servo motor encoder feeds directly into the T6 driver. This seems to work very well and with the tuning software I'm able to move the X axis very quickly and accurately. The T6 drivers accept step and direction pulses (just like a stepper).
I also have Magnetic scales that presently only drive a separate DRO. Eventually I plan to split the magnetic scale signals and drive both the separate DRO as well as the Mesa board, so I can "close the loop" around the magnetic scales instead of the servo encoders so that any infinitesimally small errors in the ball screws etc. are corrected. So for the moment their is no encoder signal being fed back to LinuxCNC.
So until I make up the splitter I need treat the servos more like a stepper, send the pulses and hope for the best.
Today's problem
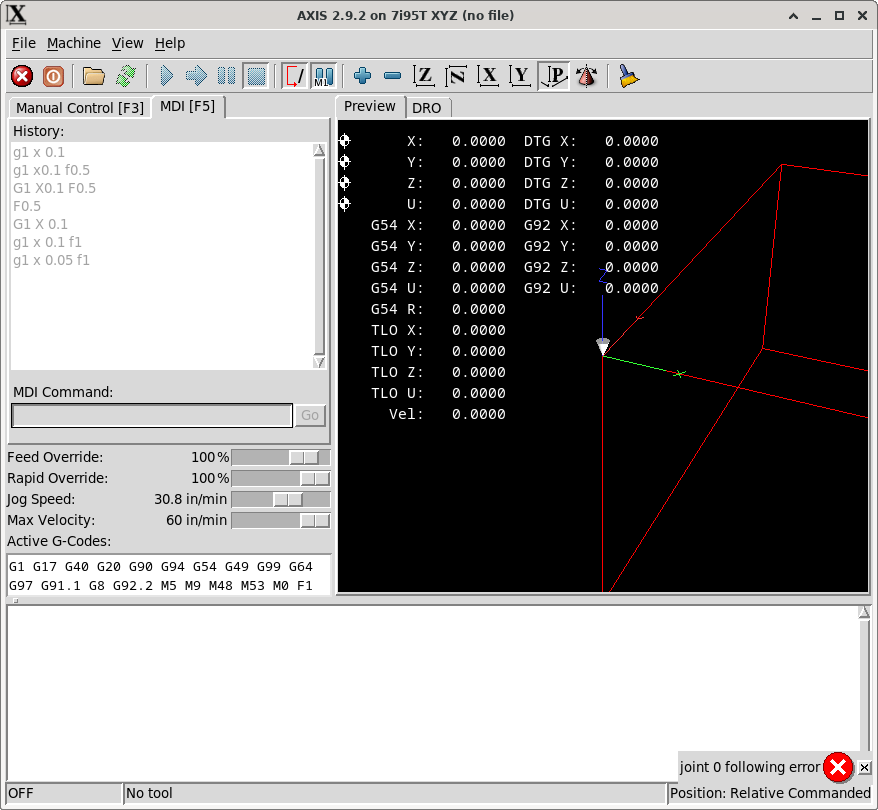
After resetting E-Stop, and enabling machine power on
Then manually homing (I think that's a requirement)
Then moving to the MDI tab, I send G1X 0.1 F1 and I get a following error.
I assume this is because LinuxCNC is expecting an encoder signal, but I'm not sure about that or how I can get LinuxCNC to treat the motor like an open loop stepper?
Your assistance is much appreciated.
I just watched the video in your link, I assume that's you in the video?
Very helpful particularly the short segment on networking, I'm strong with electronics, know next to nothing about networking and I will make time to learn more as this has been a perennial problem and I need to learn more.
Now that LinuxCNC runs and communicates with the Mesaboard verified by connecting an E-Stop button to an input and seeing it trigger in LinuxCNC when I operate the switch.
My next step might be a bit tricky, let me explain......
I'm using four ac servos to drive the various joints, X, Y, Z(quill), and U(knee)
For the moment I just want to get some motion on X.
The ac servo drivers I'm using (T6), have tuning software that I have used to configure the PID loop that is controlled internal to the T6 driver. The servo motor encoder feeds directly into the T6 driver. This seems to work very well and with the tuning software I'm able to move the X axis very quickly and accurately. The T6 drivers accept step and direction pulses (just like a stepper).
I also have Magnetic scales that presently only drive a separate DRO. Eventually I plan to split the magnetic scale signals and drive both the separate DRO as well as the Mesa board, so I can "close the loop" around the magnetic scales instead of the servo encoders so that any infinitesimally small errors in the ball screws etc. are corrected. So for the moment their is no encoder signal being fed back to LinuxCNC.
So until I make up the splitter I need treat the servos more like a stepper, send the pulses and hope for the best.
Today's problem
After resetting E-Stop, and enabling machine power on
Then manually homing (I think that's a requirement)
Then moving to the MDI tab, I send G1X 0.1 F1 and I get a following error.
I assume this is because LinuxCNC is expecting an encoder signal, but I'm not sure about that or how I can get LinuxCNC to treat the motor like an open loop stepper?
Your assistance is much appreciated.
Attachments:
Last edit: 25 Feb 2024 16:17 by slowpoke.
Please Log in or Create an account to join the conversation.
- PCW
-

- Online
- Moderator
-
Less
More
- Posts: 17988
- Thank you received: 5281
25 Feb 2024 17:29 #294412
by PCW
Replied by PCW on topic LinuxCNC Errors - Help please
Whether LinuxCNC uses encoder feedback or local
stepgen feedback is determined by your main hal file.
Can postt your main hal file and ini file here?
stepgen feedback is determined by your main hal file.
Can postt your main hal file and ini file here?
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
25 Feb 2024 19:14 #294433
by slowpoke
Replied by slowpoke on topic LinuxCNC Errors - Help please
Please see attached
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21738
- Thank you received: 7428
25 Feb 2024 19:29 #294434
by tommylight
Replied by tommylight on topic LinuxCNC Errors - Help please
Download the latest MesaCT and try again, this version has an issue where it does not generate the stepgen stuff in the hal file.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12032
- Thank you received: 4104
25 Feb 2024 19:32 - 25 Feb 2024 19:33 #294436
by rodw
Replied by rodw on topic LinuxCNC Errors - Help please
Your hal file looks like its missing a bit but i'll leave it to PCW as he has more experience
From what you are describing, you might like to look at Dual loop feedback where the motor encoder in velocity mode is attached to the motor drive
And the outer loop from your scales in position mode is closed by linuxcnc.
Ref: granitedevices.com/wiki/Dual-loop_feedback_position_control
From what you are describing, you might like to look at Dual loop feedback where the motor encoder in velocity mode is attached to the motor drive
And the outer loop from your scales in position mode is closed by linuxcnc.
Ref: granitedevices.com/wiki/Dual-loop_feedback_position_control
Last edit: 25 Feb 2024 19:33 by rodw.
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
Time to create page: 0.181 seconds