LinuxCNC installation + 7I96S
- jmp97
- Offline
- Junior Member
-

Less
More
- Posts: 32
- Thank you received: 0
13 Oct 2025 17:11 #336386
by jmp97
LinuxCNC installation + 7I96S was created by jmp97
Hello. I have installed the latest version of LinuxCNC. Everything seems to be correct, but I cannot see the jogs to control the motors on the interface and the red ‘X’ does nothing. I do not know what to do. I cannot find a way to continue. Thank you.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17990
- Thank you received: 5281
13 Oct 2025 17:44 #336388
by PCW
Replied by PCW on topic LinuxCNC installation + 7I96S
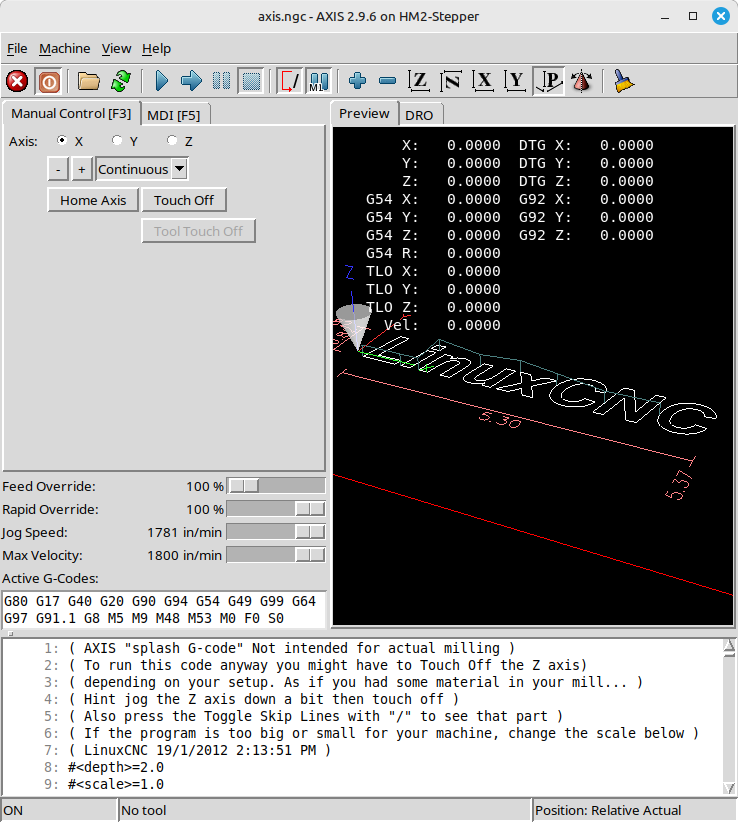
If the "Emergency Stop" button (red X) does nothing, this is likely an issue in the hal or ini files.
Can you post your hal/ini files here?
Axis should look something like this initially (before estop is released):
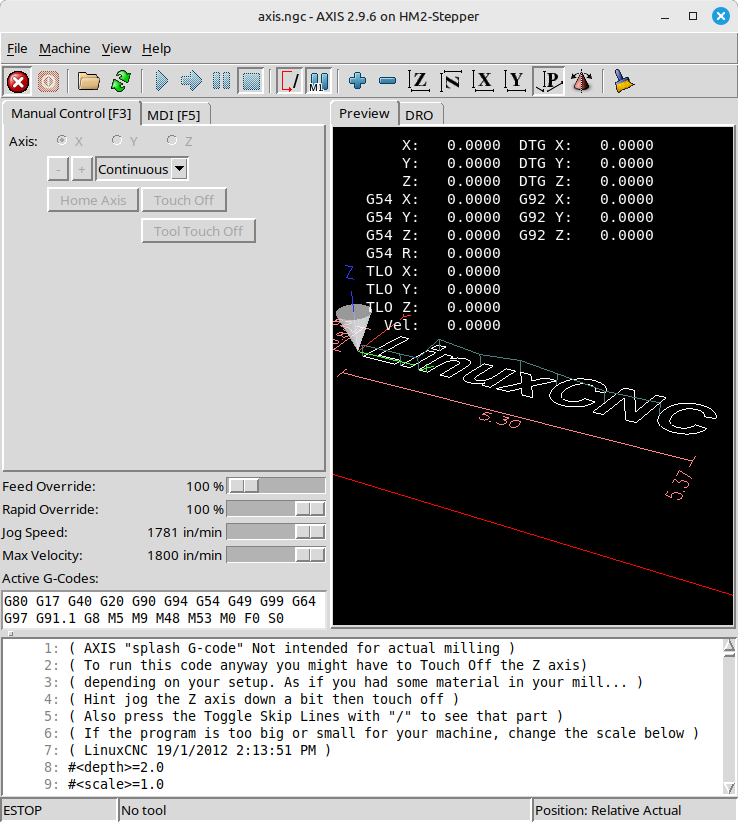
After Estop is released and before power (Orange button) is on:
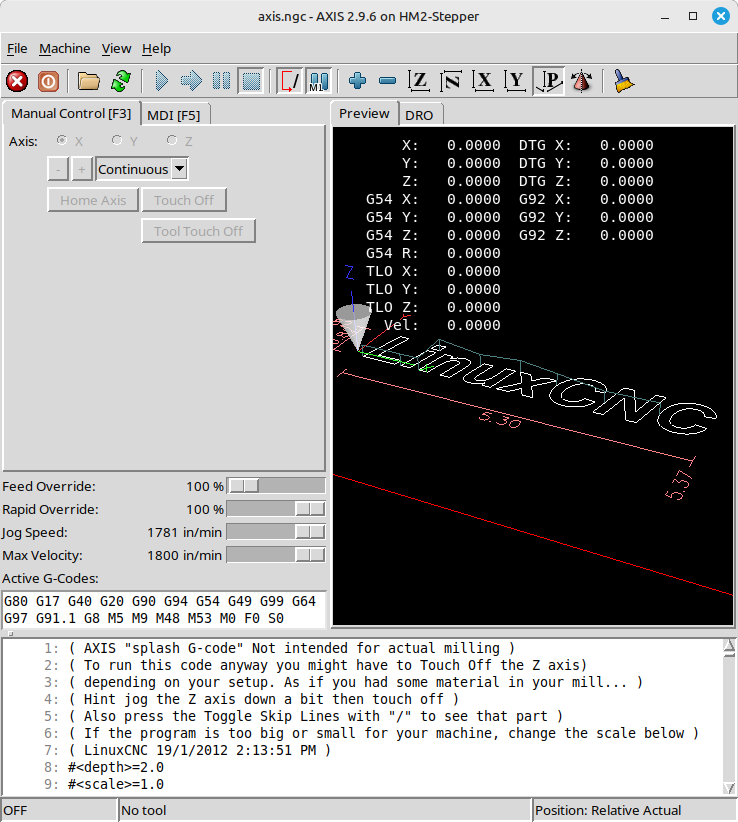
and after power is on:
Can you post your hal/ini files here?
Axis should look something like this initially (before estop is released):
After Estop is released and before power (Orange button) is on:
and after power is on:
Attachments:
Please Log in or Create an account to join the conversation.
- jmp97
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
13 Oct 2025 20:36 #336396
by jmp97
Replied by jmp97 on topic LinuxCNC installation + 7I96S
Hi!
# Generado por PNCconf en Mon Oct 13 14:42:16 2025
# Utilizando la versión LinuxCNC: Master (2.9)
# Si realiza cambios en este archivo, serán
# sobrescrito cuando ejecuta PNCconf nuevamente
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config="num_encoders=1 num_pwmgens=1 num_stepgens=5 sserial_port_0=0xxxxxxx"
setp hm2_7i96s.0.pwmgen.pwm_frequency 20000
setp hm2_7i96s.0.pwmgen.pdm_frequency 6000000
setp hm2_7i96s.0.watchdog.timeout_ns 5000000
# loadrt hal_parport cfg="0 out" # <-- comentado
loadrt pid names=pid.x,pid.y,pid.z,pid.s
#addf parport.0.read servo-thread <-- comentado/eliminado
addf hm2_7i96s.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
#addf parport.0.write servo-thread <-- comentado/eliminado
addf hm2_7i96s.0.write servo-thread
setp hm2_7i96s.0.dpll.01.timer-us -50
setp hm2_7i96s.0.stepgen.timer-number 1
# señales de salida externas
# señales de entrada externas
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Stepgen X
setp hm2_7i96s.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i96s.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i96s.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i96s.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i96s.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i96s.0.stepgen.00.step_type 0
setp hm2_7i96s.0.stepgen.00.control-type 1
setp hm2_7i96s.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i96s.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => hm2_7i96s.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i96s.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i96s.0.stepgen.00.enable
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
# Generado por PNCconf en Mon Oct 13 14:42:16 2025
# Utilizando la versión LinuxCNC: Master (2.9)
# Si realiza cambios en este archivo, serán
# sobrescrito cuando ejecuta PNCconf nuevamente
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config="num_encoders=1 num_pwmgens=1 num_stepgens=5 sserial_port_0=0xxxxxxx"
setp hm2_7i96s.0.pwmgen.pwm_frequency 20000
setp hm2_7i96s.0.pwmgen.pdm_frequency 6000000
setp hm2_7i96s.0.watchdog.timeout_ns 5000000
# loadrt hal_parport cfg="0 out" # <-- comentado
loadrt pid names=pid.x,pid.y,pid.z,pid.s
#addf parport.0.read servo-thread <-- comentado/eliminado
addf hm2_7i96s.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
#addf parport.0.write servo-thread <-- comentado/eliminado
addf hm2_7i96s.0.write servo-thread
setp hm2_7i96s.0.dpll.01.timer-us -50
setp hm2_7i96s.0.stepgen.timer-number 1
# señales de salida externas
# señales de entrada externas
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Stepgen X
setp hm2_7i96s.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i96s.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i96s.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i96s.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i96s.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i96s.0.stepgen.00.step_type 0
setp hm2_7i96s.0.stepgen.00.control-type 1
setp hm2_7i96s.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i96s.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => hm2_7i96s.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i96s.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i96s.0.stepgen.00.enable
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
Please Log in or Create an account to join the conversation.
- jmp97
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
13 Oct 2025 20:37 #336397
by jmp97
Replied by jmp97 on topic LinuxCNC installation + 7I96S
[EMC]
MACHINE = my_LinuxCNC_machine
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/jmpm/linuxcnc/nc_files
PYVCP = pyvcp-panel.xml
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 25.000000
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
CYCLE_TIME = 100
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
RS274NGC_STARTUP_CODE = G21 G40 G90 G94 G97 G64 P0.025
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
# **** Esto es sólo para información ****
CARD0=hm2_7i96s.0
[HAL]
HALUI = halui
HALFILE = my_LinuxCNC_machine.hal
POSTGUI_HALFILE = custom_postgui.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
COORDINATES = XYZ
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 25.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
HOME_SEQUENCE = 2
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
HOME_SEQUENCE = 3
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
[JOINT_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
HOME_OFFSET = 0.0
HOME_SEQUENCE = 1
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
[HM2ETH]
IP = 192.168.1.121
Interface = enp2s0
MACHINE = my_LinuxCNC_machine
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/jmpm/linuxcnc/nc_files
PYVCP = pyvcp-panel.xml
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 25.000000
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
CYCLE_TIME = 100
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
RS274NGC_STARTUP_CODE = G21 G40 G90 G94 G97 G64 P0.025
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
# **** Esto es sólo para información ****
CARD0=hm2_7i96s.0
[HAL]
HALUI = halui
HALFILE = my_LinuxCNC_machine.hal
POSTGUI_HALFILE = custom_postgui.hal
SHUTDOWN = shutdown.hal
[HALUI]
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
COORDINATES = XYZ
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 25.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
HOME_SEQUENCE = 2
#******************************************
#******************************************
[AXIS_Y]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
HOME_SEQUENCE = 3
#******************************************
#******************************************
[AXIS_Z]
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
[JOINT_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# Los valores a continuación deben ser un 25% más grandes que MAX_VELOCITY y MAX_ACCELERATION
# Si se usa compensación de CONTRAGOLPE, STEPGEN_MAXACCEL debe ser 100% mayor.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# estos son en nanosegundos
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 5000
STEPSPACE = 5000
STEP_SCALE = 200.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
HOME_OFFSET = 0.0
HOME_SEQUENCE = 1
#******************************************
[SPINDLE_0]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
[HM2ETH]
IP = 192.168.1.121
Interface = enp2s0
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17990
- Thank you received: 5281
13 Oct 2025 21:01 #336398
by PCW
Replied by PCW on topic LinuxCNC installation + 7I96S
The hal file is incomplete, if you cannot get out of estop, this is likely an issue
with the EStop related signals and these tend to be at the end of pncconf created
hal files.
Did you setup an external EStop? That might be another reason for inability
to get out of the EStop state.
with the EStop related signals and these tend to be at the end of pncconf created
hal files.
Did you setup an external EStop? That might be another reason for inability
to get out of the EStop state.
Please Log in or Create an account to join the conversation.
- jmp97
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
14 Oct 2025 02:04 #336406
by jmp97
Replied by jmp97 on topic LinuxCNC installation + 7I96S
I simply followed the installer's instructions. I only configured the selection of the 3 axes to their ports. I don't remember configuring an EStop.
It won't let me exit the emergency stop on the interface.
Is there a tutorial on how to configure it correctly?
It won't let me exit the emergency stop on the interface.
Is there a tutorial on how to configure it correctly?
Please Log in or Create an account to join the conversation.
- jmp97
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
14 Oct 2025 16:31 #336432
by jmp97
Replied by jmp97 on topic LinuxCNC installation + 7I96S
Would it be possible to download the INI and HAL files for my Mesa and LinuxCNC version?
I have made many configurations and I still cannot control the machine.
I have made many configurations and I still cannot control the machine.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21741
- Thank you received: 7430
14 Oct 2025 16:50 #336434
by tommylight
Replied by tommylight on topic LinuxCNC installation + 7I96S
1. you are selecting stuff you do not need, like parallel port
2. might also be the "locale" thing where the wizard has issues with other languages than English.
To test, boot the PC from the USB you used to install LinuxCNC in LIVE mode, use the wizard to make a new configuration and save it to hard drive or another USB, then reboot to normal install and test the config.
2. might also be the "locale" thing where the wizard has issues with other languages than English.
To test, boot the PC from the USB you used to install LinuxCNC in LIVE mode, use the wizard to make a new configuration and save it to hard drive or another USB, then reboot to normal install and test the config.
Please Log in or Create an account to join the conversation.
- jmp97
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
14 Oct 2025 18:04 #336438
by jmp97
Replied by jmp97 on topic LinuxCNC installation + 7I96S
With the LinuxCNC test configuration, when I select the 7I96S table option, the interface allows me to exit emergency mode. However, I cannot find a way to move the motors (there are no jogs).
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17990
- Thank you received: 5281
14 Oct 2025 18:27 #336441
by PCW
Replied by PCW on topic LinuxCNC installation + 7I96S
Can you post the complete hal file so that cause of the issue can be determined?
Please Log in or Create an account to join the conversation.
Time to create page: 0.508 seconds