- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
(Freelancer) Linux CNC + EtherCat + RPi 4 Setup
- Dj Junior
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

Less
More
- Posts: 33
- Thank you received: 0
20 Feb 2022 18:42 - 22 Feb 2022 10:49 #235405
by Dj Junior
Linux CNC + EtherCat + RPi 4 Setup was created by Dj Junior
Hello
Is there a freelancer who can help me to configure linuxcnc with ethercat stepper driver on raspberry pi?
Is there a freelancer who can help me to configure linuxcnc with ethercat stepper driver on raspberry pi?
Last edit: 22 Feb 2022 10:49 by Dj Junior.
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
20 Feb 2022 19:27 #235415
by Grotius
Replied by Grotius on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Hi,
So far i know there are several topics where is explained how to install a rpi with lcnc.
Did you see this topics already?
So far i know there are several topics where is explained how to install a rpi with lcnc.
Did you see this topics already?
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
20 Feb 2022 20:11 - 20 Feb 2022 20:12 #235425
by Dj Junior
Replied by Dj Junior on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Hi Grotius
I have installed and configured everything. dmesg does not give an error, ethercat debug does not give an error, slaves are in OP state but the stepper not work run.
I have installed and configured everything. dmesg does not give an error, ethercat debug does not give an error, slaves are in OP state but the stepper not work run.
Last edit: 20 Feb 2022 20:12 by Dj Junior.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
20 Feb 2022 20:19 - 20 Feb 2022 20:20 #235427
by Grotius
Replied by Grotius on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Hi,
Attached files worked for me to drive the steppers.
When in lcnc do you see the lcec's already in halview?
Attached files worked for me to drive the steppers.
When in lcnc do you see the lcec's already in halview?
Last edit: 20 Feb 2022 20:20 by Grotius.
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
21 Feb 2022 08:36 #235449
by Dj Junior
Replied by Dj Junior on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Hi
You use EL2124 while I have generic drivers as attached.
Yes! I see the lcec's already and I get feedback from el2008 device but not stepper.
You use EL2124 while I have generic drivers as attached.
Yes! I see the lcec's already and I get feedback from el2008 device but not stepper.
Attachments:
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
21 Feb 2022 09:53 #235451
by db1981
Replied by db1981 on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
hi,
-linuxcnc starts without errors?
-all ethercat slaves gets op state after linuxcnc start?
-do you get any values on the slave pins, if you look with halshow ?
example lcec.0.4.cia-statusword or actual-position
-linuxcnc starts without errors?
-all ethercat slaves gets op state after linuxcnc start?
-do you get any values on the slave pins, if you look with halshow ?
example lcec.0.4.cia-statusword or actual-position
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
21 Feb 2022 10:19 #235452
by Dj Junior
Replied by Dj Junior on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
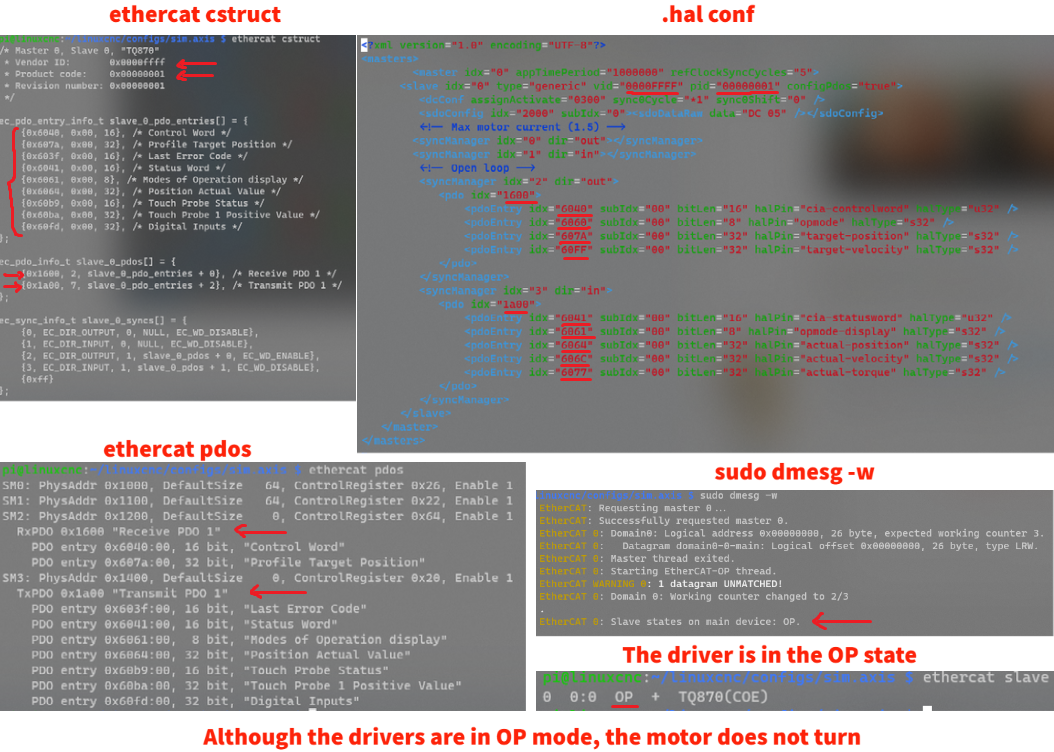
Linuxcnc starts without errors, All driver are in OP state. there are no errors in dmesg.
The only thing I noticed is that starting linuxcnc the slaves are in OP state but doing
ethercat upload -p1 -t int16 0x6040 0 (Control Word)
the value is 6 instead the manufacturer says it must be 15 to enable the motors
ethercat upload -p1 -t int8 0x6060 0 (mode of operation) returns 0 instead it must be 08
I don't know where these values are set
The only thing I noticed is that starting linuxcnc the slaves are in OP state but doing
ethercat upload -p1 -t int16 0x6040 0 (Control Word)
the value is 6 instead the manufacturer says it must be 15 to enable the motors
ethercat upload -p1 -t int8 0x6060 0 (mode of operation) returns 0 instead it must be 08
I don't know where these values are set
Attachments:
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
21 Feb 2022 11:07 #235454
by db1981
Replied by db1981 on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
ethercat upload, download is the wrong way after starting linuxcnc.
These commands are for asynchronous communication and useless, after the ethercat realtime thread is started.
please use halshow to see if there are any values are transported from the drive.
In Axis click on Show Hal Configuration, then in the left tree you can select pins and after that navigate to your lcec pins.
lock for lcec.0.4.cia-statusword and lcec.0.4.actual-position .
By the way, your config has to match the drives pdo / cstruct to get the right pdo count. so make it identicall to the pdos output. You have to add the "last Error Code" Touch probe, digital inputs stuff etc.
These commands are for asynchronous communication and useless, after the ethercat realtime thread is started.
please use halshow to see if there are any values are transported from the drive.
In Axis click on Show Hal Configuration, then in the left tree you can select pins and after that navigate to your lcec pins.
lock for lcec.0.4.cia-statusword and lcec.0.4.actual-position .
By the way, your config has to match the drives pdo / cstruct to get the right pdo count. so make it identicall to the pdos output. You have to add the "last Error Code" Touch probe, digital inputs stuff etc.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
21 Feb 2022 11:16 #235455
by db1981
Replied by db1981 on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
The only thing I noticed is that starting linuxcnc the slaves are in OP state but doing
ethercat upload -p1 -t int16 0x6040 0 (Control Word)
the value is 6 instead the manufacturer says it must be 15 to enable the motors
6 is the rights value in standby mode, you have to tell the drive that it should be enable . If you are using the cia402 component the enable pin has to be set to true. usually you will connect this pin to the enable pin from the joint. That mean if you switch on estop and machine on in linuxcnc the drive will be enabled.
But in you hal file, the connection from joint enable to enable-x is commented out....
ethercat upload -p1 -t int16 0x6040 0 (Control Word)
the value is 6 instead the manufacturer says it must be 15 to enable the motors
6 is the rights value in standby mode, you have to tell the drive that it should be enable . If you are using the cia402 component the enable pin has to be set to true. usually you will connect this pin to the enable pin from the joint. That mean if you switch on estop and machine on in linuxcnc the drive will be enabled.
But in you hal file, the connection from joint enable to enable-x is commented out....
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
21 Feb 2022 11:30 #235456
by Dj Junior
Replied by Dj Junior on topic (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Hi
To add last Error Code, Touch probe etc what values should I put on halPin?
To add last Error Code, Touch probe etc what values should I put on halPin?
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- (Freelancer) Linux CNC + EtherCat + RPi 4 Setup
Time to create page: 0.812 seconds