EtherCat master station problem
- yi2580
- Offline
- Elite Member
-

Less
More
- Posts: 161
- Thank you received: 3
05 Dec 2022 01:30 #258551
by yi2580
EtherCat master station problem was created by yi2580
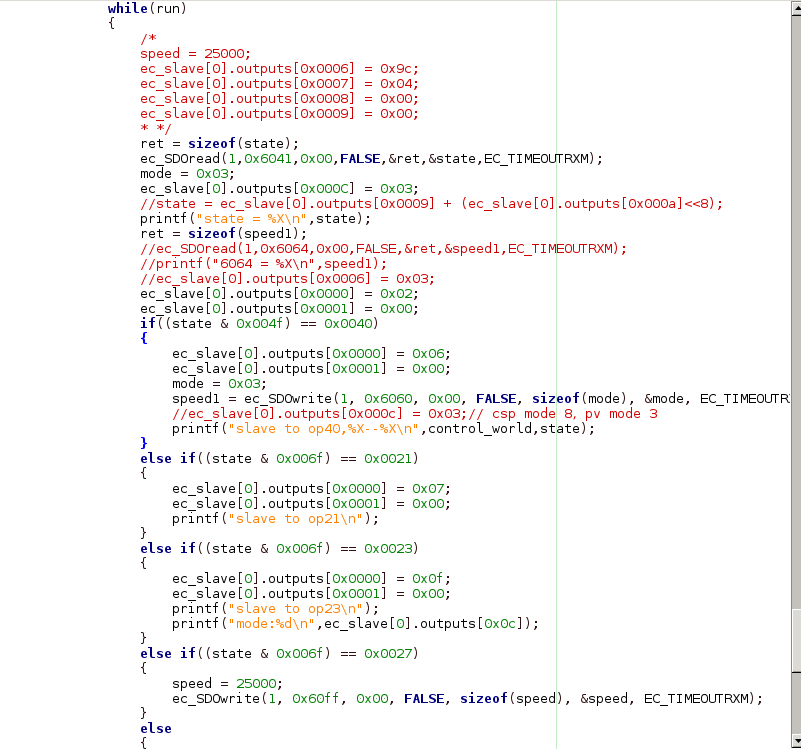
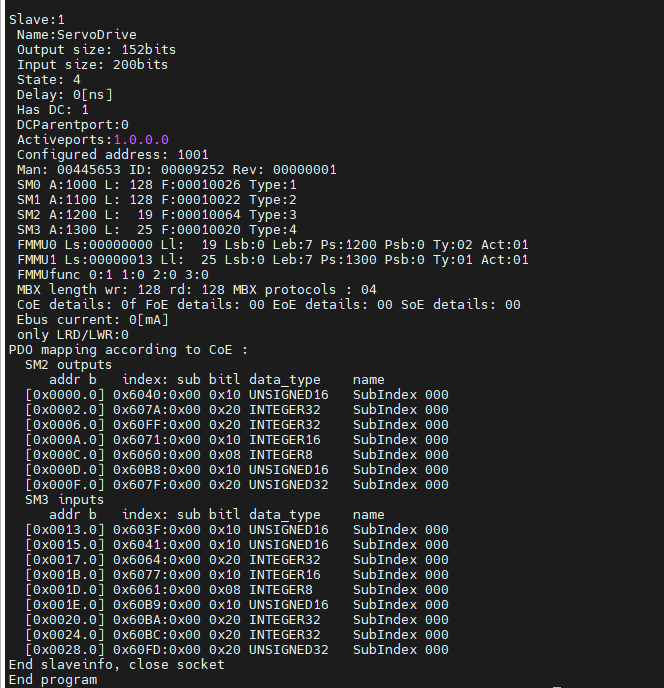
Hello, I want to ask some questions about the EtherCat master station. Now I want to write a master station of SOEM by myself to simply control my motor. I can control the step driver with SOEM control, but I cannot drive when I use the servo driver. The value read out by the status word 6041 is 0x210. I am ready to see my servo display through the driver. I don't know why I hope someone can help me.
Attachments:
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
05 Dec 2022 08:37 #258568
by db1981
Replied by db1981 on topic EtherCat master station problem
I think this is not LinuxCNC related...
As far as i can see from your snippet, you are trying to set status/controlword and speed by sdo communication. This dont work.
You have to config pdos for the slave (these are running in the realtime thread) and have to write to them. The slave will not work in running/enabled mode with SDO Data.
SDO communication is mostly used in state init/preop, but in op state sdo register that also has an pdo are not recognized.
As far as i can see from your snippet, you are trying to set status/controlword and speed by sdo communication. This dont work.
You have to config pdos for the slave (these are running in the realtime thread) and have to write to them. The slave will not work in running/enabled mode with SDO Data.
SDO communication is mostly used in state init/preop, but in op state sdo register that also has an pdo are not recognized.
Please Log in or Create an account to join the conversation.
Time to create page: 0.138 seconds