- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Ethercat - Failed to register PDO entry: No such file or directory
Ethercat - Failed to register PDO entry: No such file or directory
- Nalesque
-
 Topic Author
Topic Author
- Offline
- New Member
-

- Posts: 4
- Thank you received: 1
I am currently trying to configure an EasyIO board from www.bausano.net/en/hardware/easyio.html which is an ethercat board with analog and digital IO.
I followed the Rodw post: forum.linuxcnc.org/ethercat/45336-etherc...-how-to-step-by-step to install needed tools and the tutorial HERE to build my XML file (in attachment).
By the way, thank you very much to them and all the ethercat contributors for all their work.
Now the problem: when I try to load my config, I get this debug info:
Debug file information:
Note: Using POSIX realtime
Failed to register PDO entry: No such file or directory
LCEC: master 0 PDO entry registration failed
lcec: rtapi_app_main: Invalid argument (-22)
./hallib/ethercat.hal:2: waitpid failed /usr/bin/rtapi_app lcec
./hallib/ethercat.hal:2: /usr/bin/rtapi_app exited without becoming ready
./hallib/ethercat.hal:2: insmod for lcec failed, returned -1
144345
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
I do not understand the "failed to register PDO entry", is it a rights problem? Maybe I forgot to install something?
ethercat mastergives me:
Master0
Phase: Idle
Active: no
Slaves: 1
Ethernet devices:
Main: 00:25:b3:76:73:71 (attached)
Link: UP
Tx frames: 307404
Tx bytes: 18444272
Rx frames: 307402
Rx bytes: 18444152
Tx errors: 0
Tx frame rate [1/s]: 117 116 116
Tx rate [KByte/s]: 6.9 6.8 6.8
Rx frame rate [1/s]: 117 116 116
Rx rate [KByte/s]: 6.9 6.8 6.8
Common:
Tx frames: 362877
Tx bytes: 21772668
Rx frames: 362873
Rx bytes: 21772428
Lost frames: 4
Tx frame rate [1/s]: 117 116 116
Tx rate [KByte/s]: 6.9 6.8 6.8
Rx frame rate [1/s]: 117 116 116
Rx rate [KByte/s]: 6.9 6.8 6.8
Loss rate [1/s]: 0 0 0
Frame loss [%]: 0.0 0.0 0.0
Distributed clocks:
Reference clock: Slave 0
DC reference time: 0
Application time: 0
2000-01-01 00:00:00.000000000
Do you have an idea about that? Pretty sure it is a silly mistake...
Thank you all
Regards
Please Log in or Create an account to join the conversation.
- jjdege
-

- Offline
- Premium Member
-

- Posts: 125
- Thank you received: 37
<syncManager idx="0" dir="out/in">
out or in must have sequential numbering
Regards
Attachments:
Please Log in or Create an account to join the conversation.
- Nalesque
-
Topic Author
- Offline
- New Member
-
- Posts: 4
- Thank you received: 1
Thank you for your answer, indeed the problem was the numbering.
I wanted so much to organize the IO that I did not noticed it, I feel silly now
")
Are you satisfied with the EasyIO board?
Please Log in or Create an account to join the conversation.
- jjdege
-
- Offline
- Premium Member
-
- Posts: 125
- Thank you received: 37
I purchased and configured the EasyIO, not used yet, I use the FR4000 step/dir in EtherCAT, I'm switching to Delta servos and the EasyIO will be necessary for the cnc.
I'll tell you if it works
I think the analog in/out pins work with float and s32, I have to do some tests
Please Log in or Create an account to join the conversation.
- Nalesque
-
Topic Author
- Offline
- New Member
-
- Posts: 4
- Thank you received: 1
In HALShow, EasyIO is online, oper and state is op, but IO does not react when I change state...
I'll let you know if I find out.
For the analog, I switched to float and did not revert
Please Log in or Create an account to join the conversation.
- jjdege
-
- Offline
- Premium Member
-
- Posts: 125
- Thank you received: 37
I attach the xml file, tested and ok
I have tested the analog pins and they work two ways, s32 and float
with a value of 33000 from 9.95V
Attachments:
Please Log in or Create an account to join the conversation.
- Nalesque
-
Topic Author
- Offline
- New Member
-
- Posts: 4
- Thank you received: 1
Thank you for your tests and infos.
I realized that I'm

Thank you jjdege
Please Log in or Create an account to join the conversation.
- eduard
-
- Offline
- Premium Member
-
- Posts: 80
- Thank you received: 12
I made the ethercat-conf.xml file what is attached below. On HALshow I see the pins, but I'm not able to communicate with the board with the test rig, what I also bought for the test.
May I ask for some help with it?
ethercat master
ethercat slaveslinuxcnc@m5:~$ ethercat master
Master0
Phase: Operation
Active: yes
Slaves: 4
Ethernet devices:
Main: ac:87:a3:02:1f:77 (attached)
Link: UP
Tx frames: 449734
Tx bytes: 29443638
Rx frames: 449733
Rx bytes: 29443562
Tx errors: 0
Tx frame rate [1/s]: 1000 1000 998
Tx rate [KByte/s]: 65.1 65.2 65.0
Rx frame rate [1/s]: 1000 1000 998
Rx rate [KByte/s]: 65.1 65.2 65.0
Common:
Tx frames: 449734
Tx bytes: 29443638
Rx frames: 449733
Rx bytes: 29443562
Lost frames: 0
Tx frame rate [1/s]: 1000 1000 998
Tx rate [KByte/s]: 65.1 65.2 65.0
Rx frame rate [1/s]: 1000 1000 998
Rx rate [KByte/s]: 65.1 65.2 65.0
Loss rate [1/s]: 0 0 0
Frame loss [%]: 0.0 0.0 0.0
Distributed clocks:
Reference clock: Slave 0
DC reference time: 751746277851565000
Application time: 751746643058053959
2023-10-27 18:30:43.058053959
linuxcnc@m5:~$ ethercat slaves
0 0:0 OP + EK1100 EtherCAT-Koppler (2A E-Bus)
1 0:1 OP + EL1008 8K. Dig. Eingang 24V, 3ms
2 0:2 OP + EL2008-0015 8K. Dig. Ausgang 24V DC, 0.35A, nicht kurzschlussfe
3 0:3 PREOP + Generic 32+32 bytes rev 1
Please Log in or Create an account to join the conversation.
- jjdege
-
- Offline
- Premium Member
-
- Posts: 125
- Thank you received: 37
I get an error in the .xml file
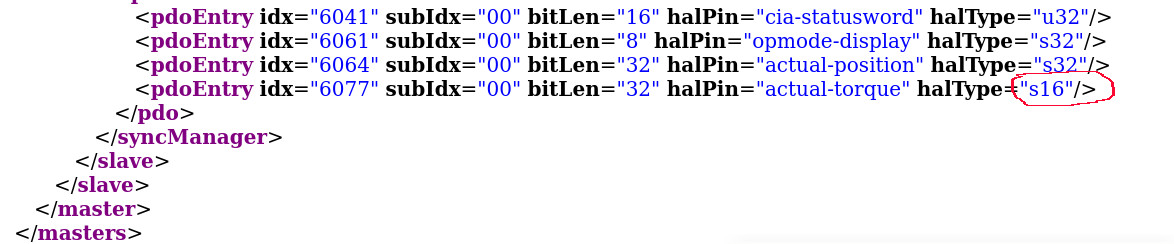
with the modified file, LCNC sees the pins,
test if the devices are op
Attachment not found
Please Log in or Create an account to join the conversation.
- eduard
-
- Offline
- Premium Member
-
- Posts: 80
- Thank you received: 12
Any other suggestion?
What arduino code shloud I use? Now I testing whith this code from examples: TestEasyCAT.ino
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Ethercat - Failed to register PDO entry: No such file or directory