CIA402 out of range?
- zmrdko
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 186
- Thank you received: 49
24 Jan 2024 09:43 - 24 Jan 2024 19:36 #291507
by zmrdko
CIA402 out of range? [solved] was created by zmrdko
Hi,
i am using cia402 component to control ASD-B3-E drives.
I get joint X following error if I jog too far on axis to either side.
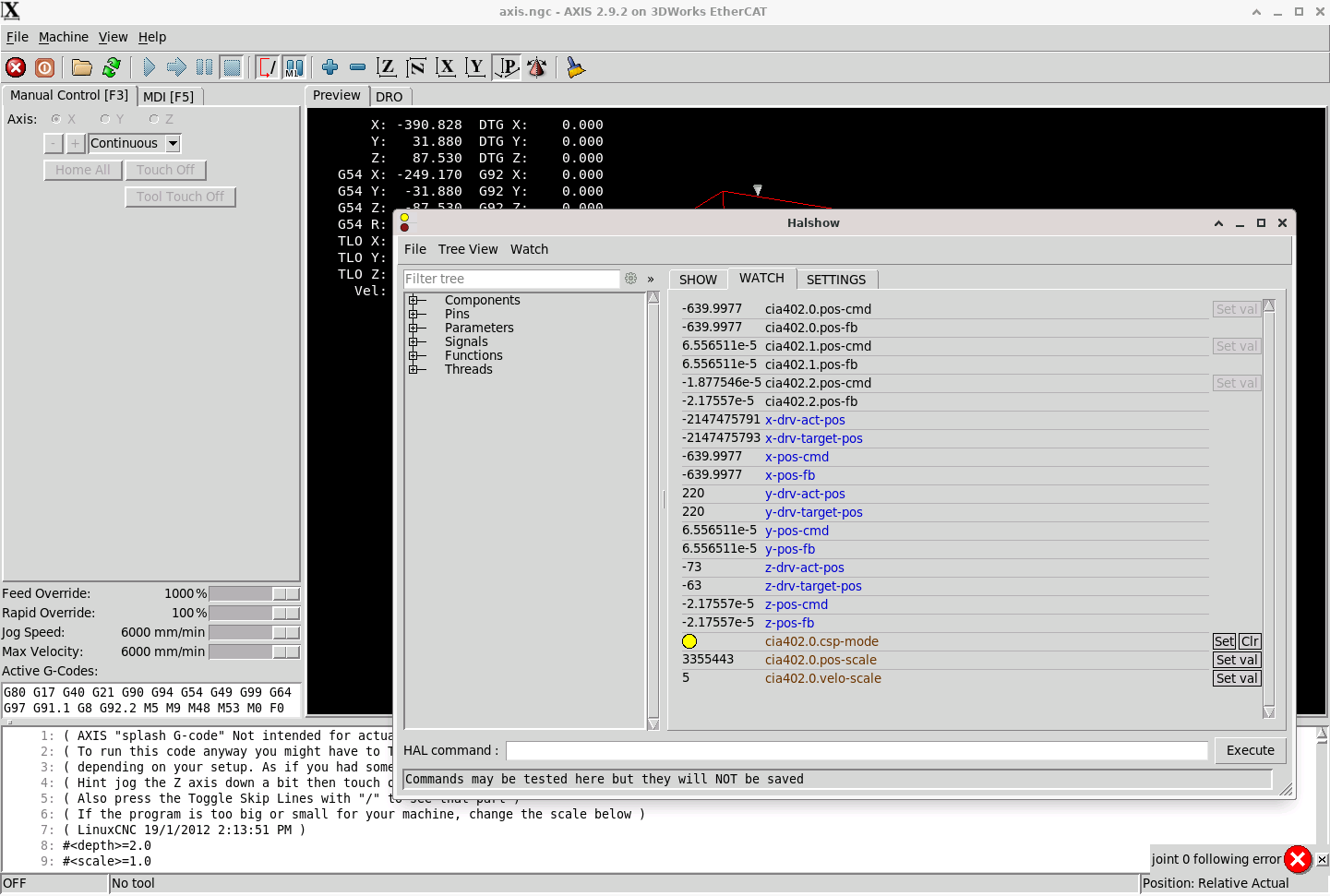
I dont know where the problem is but the position value seems like it can not get past the value 2 147 475 XXX.
Could I have reached the maximum variable value?
Is it possible to scale down resolution of the cia402 component?
I tried to set E-gear in servo drive, but cia402 component seems to default it to 1.
i am using cia402 component to control ASD-B3-E drives.
I get joint X following error if I jog too far on axis to either side.
I dont know where the problem is but the position value seems like it can not get past the value 2 147 475 XXX.
Could I have reached the maximum variable value?
Is it possible to scale down resolution of the cia402 component?
I tried to set E-gear in servo drive, but cia402 component seems to default it to 1.
Last edit: 24 Jan 2024 19:36 by zmrdko.
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-

Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 12:57 - 24 Jan 2024 12:59 #291513
by TimP
Replied by TimP on topic CIA402 out of range?
you have reached max of int32 of encoder variable, and it is overflow,
i use scale from init in HAL file as well, and gear ration in driver is 1 to 1
so in INI
SCALE = 3355443.2 (presumably it is correct ration of encoder bit/screw pitch)
in hal file
setp cia402.0.pos-scale [JOIN_0]SCALE
i use scale from init in HAL file as well, and gear ration in driver is 1 to 1
so in INI
SCALE = 3355443.2 (presumably it is correct ration of encoder bit/screw pitch)
in hal file
setp cia402.0.pos-scale [JOIN_0]SCALE
Last edit: 24 Jan 2024 12:59 by TimP.
The following user(s) said Thank You: onceloved, zmrdko
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 13:06 #291514
by TimP
Replied by TimP on topic CIA402 out of range?
also what i find that if you use internal driver gear ration it reports back only in 1mm unit because actual position is int, and if set up gear ration of pitch / mm
you will get min resolution of 1 mm on linuxCNC screen DRO.
you will get min resolution of 1 mm on linuxCNC screen DRO.
Please Log in or Create an account to join the conversation.
- zmrdko
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 186
- Thank you received: 49
24 Jan 2024 13:08 - 24 Jan 2024 13:10 #291515
by zmrdko
Replied by zmrdko on topic CIA402 out of range?
Thanks for reply!
but I believe I have the same setting in HAL:
I have router with working area 800x800mm
but I believe I have the same setting in HAL:
setp cia402.0.csp-mode 1
setp cia402.0.pos-scale 3355443.2
setp cia402.0.velo-scale 5
setp cia402.1.csp-mode 1
setp cia402.1.pos-scale 3355443.2
setp cia402.1.velo-scale 5
setp cia402.2.csp-mode 1
setp cia402.2.pos-scale 3355443.2
setp cia402.2.velo-scale 5I have router with working area 800x800mm
Last edit: 24 Jan 2024 13:10 by zmrdko.
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 13:11 - 24 Jan 2024 13:17 #291516
by TimP
Replied by TimP on topic CIA402 out of range?
+ you have different scale in INI 200, make them same, and for this it is better to use one value from INI file, just for ease of usage
what resolution of encoder? and screw pitch?
what resolution of encoder? and screw pitch?
Last edit: 24 Jan 2024 13:17 by TimP.
Please Log in or Create an account to join the conversation.
- zmrdko
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 186
- Thank you received: 49
24 Jan 2024 13:19 #291517
by zmrdko
Replied by zmrdko on topic CIA402 out of range?
scale from ini should not be applied as it has no mapping in HAL file
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 13:23 - 24 Jan 2024 13:32 #291518
by TimP
Replied by TimP on topic CIA402 out of range?
are you sure it is not used anywhere else in linuxcnc? if it is not mapped anywhere why you have it?
in my setup with 23bit encoder and 5mm pitch, i can reach up to 1200mm in one direction, before it trips in same problem of int32 overflow
in my setup with 23bit encoder and 5mm pitch, i can reach up to 1200mm in one direction, before it trips in same problem of int32 overflow
Last edit: 24 Jan 2024 13:32 by TimP.
Please Log in or Create an account to join the conversation.
- zmrdko
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 186
- Thank you received: 49
24 Jan 2024 16:04 #291532
by zmrdko
Replied by zmrdko on topic CIA402 out of range?
Its from the old config for MESA card I think.
But anyways.
Your calculation is right, but since home position for my machine is top rear right corner, and linuxcnc starts with 0 at position value. I would have only ~600mm of travel to the left.
So I would have to shut down machine with axes in the middle of the machine to cover 800mm range, which is not acceptable.
And what would be the solution for somebody with larger router and b3 servo?
But anyways.
Your calculation is right, but since home position for my machine is top rear right corner, and linuxcnc starts with 0 at position value. I would have only ~600mm of travel to the left.
So I would have to shut down machine with axes in the middle of the machine to cover 800mm range, which is not acceptable.
And what would be the solution for somebody with larger router and b3 servo?
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 17:33 #291536
by TimP
Replied by TimP on topic CIA402 out of range?
what is your encoder resolution and pitch?
you can use
MAX_LIMIT = 400
MIN_LIMIT = -400
HOME_OFFSET = -400
you can use
MAX_LIMIT = 400
MIN_LIMIT = -400
HOME_OFFSET = -400
Please Log in or Create an account to join the conversation.
- TimP
- Offline
- Senior Member
-
Less
More
- Posts: 68
- Thank you received: 9
24 Jan 2024 17:39 #291537
by TimP
Replied by TimP on topic CIA402 out of range?
btw it is better to use for home not one of the limit edgess because after pawer is off, position is deviated a bit and you can land in +0.001 or -0.001 and if limits are 400 to 0 for example, then linuxcnc shows an error that you have over travel, nothing major but just annoying message shown all the time without real danger of over travel
Please Log in or Create an account to join the conversation.
Time to create page: 0.173 seconds