- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
- Sandro
- Offline
- Senior Member
-

Less
More
- Posts: 77
- Thank you received: 37
16 May 2024 18:40 - 16 May 2024 19:10 #300773
by Sandro
Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting was created by Sandro
Hi everyone
I am testing the Rtelligent ECT86 and would like to integrate it into my CNC Plasmacutter. I am using Rods XML- and HAL-File which I modified for testing on a single slave - means I have deleted the other slave entries.
Source: github.com/rodw-au/linuxcnc-cia402/blob/...hercat-conf.xml#L158
Device and communication seems to work. However I have a no brand closed loop Nema 34 stepper motor of which I do not really know the encoder resolution (Motor model: 86HB250-156B, original driver HB860H).
When I start LCNC the motor powers on, but when I want to turn it, it stalls and I soon get a "joint amplifier fault" message. If I check the ECT86, I see the status lights flashing - 1 green, 4 red - which according to the manual means "encoder out of tolerance alarm". The manual also states that I have to set the correct encoder resolution on adress 0x2020, save and then power cycle the driver. Default setting is 4000 pulses per revolution but I think from some research I did on the internet, my motor has actually 1000 pulses/rev. So my question is, how can I save this resolution to the drive? Cause I think I cannot simply do it via the XML since the drive needs to power-cycle and I will loose the setting again. Can it be done with a LCNC terminal command? Or maybe with TwinCat?
Sidenote: If I turn the motor shaft by hand, I see a velocity feedback, but the position remains constant at 0.
Thank you in advance for any help!
I am testing the Rtelligent ECT86 and would like to integrate it into my CNC Plasmacutter. I am using Rods XML- and HAL-File which I modified for testing on a single slave - means I have deleted the other slave entries.
Source: github.com/rodw-au/linuxcnc-cia402/blob/...hercat-conf.xml#L158
Device and communication seems to work. However I have a no brand closed loop Nema 34 stepper motor of which I do not really know the encoder resolution (Motor model: 86HB250-156B, original driver HB860H).
When I start LCNC the motor powers on, but when I want to turn it, it stalls and I soon get a "joint amplifier fault" message. If I check the ECT86, I see the status lights flashing - 1 green, 4 red - which according to the manual means "encoder out of tolerance alarm". The manual also states that I have to set the correct encoder resolution on adress 0x2020, save and then power cycle the driver. Default setting is 4000 pulses per revolution but I think from some research I did on the internet, my motor has actually 1000 pulses/rev. So my question is, how can I save this resolution to the drive? Cause I think I cannot simply do it via the XML since the drive needs to power-cycle and I will loose the setting again. Can it be done with a LCNC terminal command? Or maybe with TwinCat?
Sidenote: If I turn the motor shaft by hand, I see a velocity feedback, but the position remains constant at 0.
Thank you in advance for any help!
Last edit: 16 May 2024 19:10 by Sandro.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11967
- Thank you received: 4079
16 May 2024 19:23 #300777
by rodw
Replied by rodw on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
The setting for a genuine rtelligent stepper is 800 as used in the matching hal file
github.com/rodw-au/linuxcnc-cia402/blob/main/cia402.hal#L54
I am no expert but I thought a quadrature encoder has 4 steps per actual position step so 1000 sounds about right for yours.
I think if you set it in the xml, run it and power cycle the drive it should work.
But I think the ethercat program lets you set sdos. I never needed to try that.
Also I found that the ECT86 does not like NEMA23/NEMA24 devices but is very happy with NEMA34's. You can't tune smooth movement even with open loop motors.
github.com/rodw-au/linuxcnc-cia402/blob/main/cia402.hal#L54
I am no expert but I thought a quadrature encoder has 4 steps per actual position step so 1000 sounds about right for yours.
I think if you set it in the xml, run it and power cycle the drive it should work.
But I think the ethercat program lets you set sdos. I never needed to try that.
Also I found that the ECT86 does not like NEMA23/NEMA24 devices but is very happy with NEMA34's. You can't tune smooth movement even with open loop motors.
Please Log in or Create an account to join the conversation.
- Sandro
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 37
17 May 2024 12:49 - 17 May 2024 12:51 #300822
by Sandro
Replied by Sandro on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Thank you Rod!
I agree, to my understanding due to quadrature, I will end up with 4 steps per actual position step. However, I am not sure, if the 1000 pulses is already with the quadrature considered or without it.
I will try to set the encoder resolution with the XML-File and write it to adress 0x2020 and hope, it will persist after power cycling. I also saw the scaling value of 800 in the HAL-Files of yours. However I assumed, this is the scaling for an actual axis in pulses per machine unit. I guess this is not the case then?
I agree, to my understanding due to quadrature, I will end up with 4 steps per actual position step. However, I am not sure, if the 1000 pulses is already with the quadrature considered or without it.
I will try to set the encoder resolution with the XML-File and write it to adress 0x2020 and hope, it will persist after power cycling. I also saw the scaling value of 800 in the HAL-Files of yours. However I assumed, this is the scaling for an actual axis in pulses per machine unit. I guess this is not the case then?
Last edit: 17 May 2024 12:51 by Sandro.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11967
- Thank you received: 4079
18 May 2024 10:14 #300904
by rodw
Replied by rodw on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Scale is 800 pulses per rev.
One you get motion, assume you have a 5mm pitch ballscrew, so test by moving 5mm (1 rev) and check the number of pulses. 800 for me, 1000 for you.
One you get motion, assume you have a 5mm pitch ballscrew, so test by moving 5mm (1 rev) and check the number of pulses. 800 for me, 1000 for you.
Please Log in or Create an account to join the conversation.
- Sandro
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 37
19 May 2024 16:17 - 19 May 2024 17:11 #300971
by Sandro
Replied by Sandro on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
I have been able to set the encoder resolution on register 0x2020 and the setting persists. So that works. Scaling I have set to 4000 in the Hal-File after tinkering for a while. In Halshow I get a value of 4000 for lcec.0.0.actual-position if I turn the motor shaft by hand for 1 revolution. So this seems to be encoder quadrature in effect and looks alright to me. The value is the same for cia402.0.drv-actual-position. The value for cia402.0.pos-fb changes by 1 for every revolution of the motor shaft. So I guess, it is affected by the scaling setting in the HAL-File. Basically cia402.0.drv-actual-position is divided by 4000 (4000 pulses per machine unit) which also looks alright.
Unfortunately the motor jerks and stutters in closed loop mode until I get the joint amplifier fault. The red light on the driver blinks four times which is the encoder out of tolerance alarm. The tolerance is 4000 by default on this drive. If I switch to open-loop mode (0x2011 set to 0), the motor turns normally without issues. No other parameter needs be changed. Maybe an issue with the internal PID loop?
Unfortunately the motor jerks and stutters in closed loop mode until I get the joint amplifier fault. The red light on the driver blinks four times which is the encoder out of tolerance alarm. The tolerance is 4000 by default on this drive. If I switch to open-loop mode (0x2011 set to 0), the motor turns normally without issues. No other parameter needs be changed. Maybe an issue with the internal PID loop?
Last edit: 19 May 2024 17:11 by Sandro.
Please Log in or Create an account to join the conversation.
- inspirr
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 3
22 Jul 2024 13:49 #305857
by inspirr
Replied by inspirr on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Hello @Sandro! Have you ever solved the issue? I am in the exact same situation. New steppers from stepper online, nema34, 6A 4.5 Nm, 3 ECT86 and once I activate closed loop the motors do not actually turn just vibrate and make a weird sound. And from time to time I am "lucky" and get the 1 green 4 red
Please Log in or Create an account to join the conversation.
- Sandro
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 37
22 Jul 2024 19:45 #305868
by Sandro
Replied by Sandro on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Hi inspirr
Unfortunately not. I think the default encoder setting of the ECT86 should be alright for most steppers though. I tinkered arround with lots of other settings as well. But had to give up on it for now.
Unfortunately not. I think the default encoder setting of the ECT86 should be alright for most steppers though. I tinkered arround with lots of other settings as well. But had to give up on it for now.
Please Log in or Create an account to join the conversation.
- TijsVP
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 1
21 Mar 2025 17:42 #324438
by TijsVP
Replied by TijsVP on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Hi Sandro and inspirr,
I guess it is also now still not solved?
I have the same issue with the ECT60.
Do you think it is an software issue on the driver, which maybe could be fixed with new software?
I guess it is also now still not solved?
I have the same issue with the ECT60.
Do you think it is an software issue on the driver, which maybe could be fixed with new software?
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11967
- Thank you received: 4079
21 Mar 2025 19:31 #324446
by rodw
Replied by rodw on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
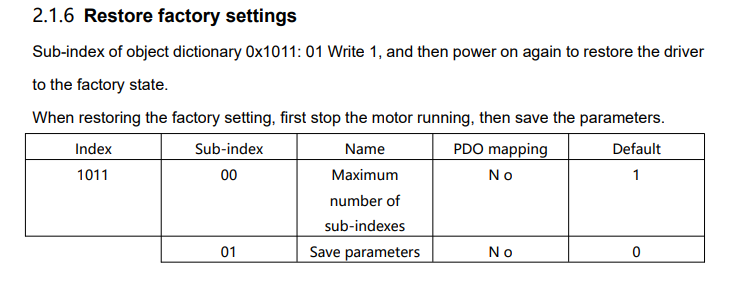
I had a drive playing up and resetting to factory defaults fixed it
Attachments:
Please Log in or Create an account to join the conversation.
- TijsVP
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 1
24 Mar 2025 09:52 - 24 Mar 2025 10:02 #324739
by TijsVP
Replied by TijsVP on topic Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Indeed, I just tried it and I got the same result. I think this is an out of the box problem with these drives. I have a batch of 7 drives all having the same issue, while before they never had this issue.
I also checked, all the settings/parameters are the same with the working and not working drives. After opening them up, also internally they look the same.
I also checked, all the settings/parameters are the same with the working and not working drives. After opening them up, also internally they look the same.
Last edit: 24 Mar 2025 10:02 by TijsVP.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Rtelligent ECT86 Closed Loop Stepper Driver Encoder Setting
Time to create page: 0.294 seconds