- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Hello, I would like to add an EtherCAT IO device. What should I do
Hello, I would like to add an EtherCAT IO device. What should I do
- feng
- Offline
- New Member
-

Less
More
- Posts: 14
- Thank you received: 1
04 Aug 2024 03:13 #306894
by feng
Hello, I would like to add an EtherCAT IO device. What should I do was created by feng
# Generated by PNCconf at Sat Sep 10 10:10:56 2016
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
#autoconverted trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadusr -W lcec_conf ethercat-conf.xml
loadrt lcec
loadrt cia402 count=4
addf lcec.read-all servo-thread
addf cia402.0.read-all servo-thread
addf cia402.1.read-all servo-thread
addf cia402.2.read-all servo-thread
addf cia402.3.read-all servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf cia402.0.write-all servo-thread
addf cia402.1.write-all servo-thread
addf cia402.2.write-all servo-thread
addf cia402.3.write-all servo-thread
addf lcec.write-all servo-thread
#*******************
# AXIS X
#*******************
# --- joint signals for motion
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-pos-fb <= joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
# --- connect stepper driver to joint
net x-pos-cmd => cia402.0.pos-cmd
net x-pos-fb => cia402.0.pos-fb
net x-enable => cia402.0.enable
# --- ect60 settings
setp cia402.0.csp-mode 1
setp cia402.0.pos-scale 26214.4
# --- from stepper(ethercat) to cia402
net x-statusword lcec.0.0.cia-statusword => cia402.0.statusword
net x-opmode-display lcec.0.0.opmode-display => cia402.0.opmode-display
net x-drv-act-pos lcec.0.0.actual-position => cia402.0.drv-actual-position
net x-drv-act-velo lcec.0.0.actual-velocity => cia402.0.drv-actual-velocity
# --- from cia402 to stepper(ethercat)
net x-controlword cia402.0.controlword => lcec.0.0.cia-controlword
net x-modes-of-operation cia402.0.opmode => lcec.0.0.opmode
net x-drv-target-pos cia402.0.drv-target-position => lcec.0.0.target-position
net x-drv-target-velo cia402.0.drv-target-velocity => lcec.0.0.target-velocity
#*******************
# AXIS Y
#*******************
# --- joint signals for motion
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-pos-fb <= joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
# --- connect stepper driver to the joint
net y-pos-cmd => cia402.1.pos-cmd
net y-pos-fb => cia402.1.pos-fb
net y-enable => cia402.1.enable
# --- ect60 settings
setp cia402.1.csp-mode 1
setp cia402.1.pos-scale 26214.4
# --- from servo(ethercat) to cia402
net y-statusword lcec.0.1.cia-statusword => cia402.1.statusword
net y-opmode-display lcec.0.1.opmode-display => cia402.1.opmode-display
net y-drv-act-pos lcec.0.1.actual-position => cia402.1.drv-actual-position
net y-drv-act-velo lcec.0.1.actual-velocity => cia402.1.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net y-controlword cia402.1.controlword => lcec.0.1.cia-controlword
net y-modes-of-operation cia402.1.opmode => lcec.0.1.opmode
net y-drv-target-pos cia402.1.drv-target-position => lcec.0.1.target-position
net y-drv-target-velo cia402.1.drv-target-velocity => lcec.0.1.target-velocity
#*******************
# AXIS z
#*******************
# --- joint signals for motion
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-pos-fb <= joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
# --- connect stepper driver to the joint
net z-pos-cmd => cia402.2.pos-cmd
net z-pos-fb => cia402.2.pos-fb
net z-enable => cia402.2.enable
# --- ect60 settings
setp cia402.2.csp-mode 1
setp cia402.2.pos-scale 26214.4
# --- from servo(ethercat) to cia402
net z-statusword lcec.0.2.cia-statusword => cia402.2.statusword
net z-opmode-display lcec.0.2.opmode-display => cia402.2.opmode-display
net z-drv-act-pos lcec.0.2.actual-position => cia402.2.drv-actual-position
net z-drv-act-velo lcec.0.2.actual-velocity => cia402.2.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net z-controlword cia402.2.controlword => lcec.0.2.cia-controlword
net z-modes-of-operation cia402.2.opmode => lcec.0.2.opmode
net z-drv-target-pos cia402.2.drv-target-position => lcec.0.2.target-position
net z-drv-target-velo cia402.2.drv-target-velocity => lcec.0.2.target-velocity
#*******************
# SPINDLE
#*******************
# --- joint signals for motion
net spindle-speed-cmd spindle.0.speed-out => cia402.3.velocity-cmd
net spindle-speed-fb cia402.3.velocity-fb => spindle.0.speed-in
net spindle-on spindle.0.on => cia402.3.enable
# --- ect60 settings
setp cia402.3.csp-mode 0
setp cia402.3.pos-scale 4000
setp cia402.3.velo-scale 400
# --- from servo(ethercat) to cia402
net s-statusword lcec.0.3.cia-statusword => cia402.3.statusword
net s-opmode-display lcec.0.3.opmode-display => cia402.3.opmode-display
net s-drv-act-pos lcec.0.3.actual-position => cia402.3.drv-actual-position
net s-drv-act-velo lcec.0.3.actual-velocity => cia402.3.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net s-controlword cia402.3.controlword => lcec.0.3.cia-controlword
net s-modes-of-operation cia402.3.opmode => lcec.0.3.opmode
net s-drv-target-pos cia402.3.drv-target-position => lcec.0.3.target-position
net s-drv-target-velo cia402.3.drv-target-velocity => lcec.0.3.target-velocity
#*********************
# E-STOP
#*********************
setp iocontrol.0.emc-enable-in 1
loadrt hal_parport cfg="0 in"
addf parport.0.read servo-thread
#addf mux4.0 servo-thread
# Jog Pendant
loadrt encoder num_chan=1
loadrt mux4 count=1
addf encoder.capture-position servo-thread
addf encoder.update-counters servo-thread
addf mux4.0 servo-thread
# If your MPG outputs a quadrature signal per click set x4 to 1
# If your MPG puts out 1 pulse per click set x4 to 0
setp encoder.0.x4-mode 0
# For velocity mode, set to 1
# In velocity mode the axis stops when the dial is stopped
# even if that means the commanded motion is not completed,
# For position mode (the default), set to 0
# In position mode the axis will move exactly jog-scale
# units for each count, regardless of how long that might take,
setp axis.x.jog-vel-mode 0
setp axis.y.jog-vel-mode 0
setp axis.z.jog-vel-mode 0
# This sets the scale that will be used based on the input to the mux4
setp mux4.0.in0 0.1
setp mux4.0.in1 0.01
setp mux4.0.in2 0.001
# The inputs to the mux4 component
net scale1 mux4.0.sel0 <= parport.0.pin-08-in-not
net scale2 mux4.0.sel1 <= parport.0.pin-07-in-not
# The output from the mux4 is sent to each axis jog scale
net mpg-scale <= mux4.0.out
net mpg-scale => axis.x.jog-scale
net mpg-scale => axis.y.jog-scale
net mpg-scale => axis.z.jog-scale
# The MPG inputs
net mpg-a encoder.0.phase-A <= parport.0.pin-13-in
net mpg-b encoder.0.phase-B <= parport.0.pin-10-in
# The Axis select inputs
net mpg-x axis.x.jog-enable <= parport.0.pin-15-in-not
net mpg-y axis.y.jog-enable <= parport.0.pin-11-in
net mpg-z axis.z.jog-enable <= parport.0.pin-14-in
# The encoder output counts to the axis. Only the selected axis will move.
net encoder-counts <= encoder.0.counts
net encoder-counts => axis.x.jog-counts
net encoder-counts => axis.y.jog-counts
net encoder-counts => axis.z.jog-counts
lite@LinuxCNC:~$ sudo ethercat slaves
0 0:0 OP + L7EC-400S(COE)
1 0:1 OP + L7EC-400S(COE)
2 0:2 OP + L7EC-400S(COE)
3 0:3 PREOP E EM32DX-E4
/* Master 0, Slave 3, "EM32DX-E4"
* Vendor ID: 0x00004321
* Product code: 0x01100073
* Revision number: 0x18050210
*/
ec_pdo_entry_info_t slave_3_pdo_entries[] = {
{0x7000, 0x01, 16}, /* OUT */
{0x6000, 0x01, 16}, /* IN */
};
ec_pdo_info_t slave_3_pdos[] = {
{0x1600, 1, slave_3_pdo_entries + 0}, /* RxPDO0-Map */
{0x1a00, 1, slave_3_pdo_entries + 1}, /* TxPDO1-Map */
};
ec_sync_info_t slave_3_syncs[] = {
{0, EC_DIR_OUTPUT, 0, NULL, EC_WD_DISABLE},
{1, EC_DIR_INPUT, 0, NULL, EC_WD_DISABLE},
{2, EC_DIR_OUTPUT, 1, slave_3_pdos + 0, EC_WD_ENABLE},
{3, EC_DIR_INPUT, 1, slave_3_pdos + 1, EC_WD_DISABLE},
{0xff}
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
#autoconverted trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadusr -W lcec_conf ethercat-conf.xml
loadrt lcec
loadrt cia402 count=4
addf lcec.read-all servo-thread
addf cia402.0.read-all servo-thread
addf cia402.1.read-all servo-thread
addf cia402.2.read-all servo-thread
addf cia402.3.read-all servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf cia402.0.write-all servo-thread
addf cia402.1.write-all servo-thread
addf cia402.2.write-all servo-thread
addf cia402.3.write-all servo-thread
addf lcec.write-all servo-thread
#*******************
# AXIS X
#*******************
# --- joint signals for motion
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-pos-fb <= joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
# --- connect stepper driver to joint
net x-pos-cmd => cia402.0.pos-cmd
net x-pos-fb => cia402.0.pos-fb
net x-enable => cia402.0.enable
# --- ect60 settings
setp cia402.0.csp-mode 1
setp cia402.0.pos-scale 26214.4
# --- from stepper(ethercat) to cia402
net x-statusword lcec.0.0.cia-statusword => cia402.0.statusword
net x-opmode-display lcec.0.0.opmode-display => cia402.0.opmode-display
net x-drv-act-pos lcec.0.0.actual-position => cia402.0.drv-actual-position
net x-drv-act-velo lcec.0.0.actual-velocity => cia402.0.drv-actual-velocity
# --- from cia402 to stepper(ethercat)
net x-controlword cia402.0.controlword => lcec.0.0.cia-controlword
net x-modes-of-operation cia402.0.opmode => lcec.0.0.opmode
net x-drv-target-pos cia402.0.drv-target-position => lcec.0.0.target-position
net x-drv-target-velo cia402.0.drv-target-velocity => lcec.0.0.target-velocity
#*******************
# AXIS Y
#*******************
# --- joint signals for motion
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-pos-fb <= joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
# --- connect stepper driver to the joint
net y-pos-cmd => cia402.1.pos-cmd
net y-pos-fb => cia402.1.pos-fb
net y-enable => cia402.1.enable
# --- ect60 settings
setp cia402.1.csp-mode 1
setp cia402.1.pos-scale 26214.4
# --- from servo(ethercat) to cia402
net y-statusword lcec.0.1.cia-statusword => cia402.1.statusword
net y-opmode-display lcec.0.1.opmode-display => cia402.1.opmode-display
net y-drv-act-pos lcec.0.1.actual-position => cia402.1.drv-actual-position
net y-drv-act-velo lcec.0.1.actual-velocity => cia402.1.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net y-controlword cia402.1.controlword => lcec.0.1.cia-controlword
net y-modes-of-operation cia402.1.opmode => lcec.0.1.opmode
net y-drv-target-pos cia402.1.drv-target-position => lcec.0.1.target-position
net y-drv-target-velo cia402.1.drv-target-velocity => lcec.0.1.target-velocity
#*******************
# AXIS z
#*******************
# --- joint signals for motion
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-pos-fb <= joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
# --- connect stepper driver to the joint
net z-pos-cmd => cia402.2.pos-cmd
net z-pos-fb => cia402.2.pos-fb
net z-enable => cia402.2.enable
# --- ect60 settings
setp cia402.2.csp-mode 1
setp cia402.2.pos-scale 26214.4
# --- from servo(ethercat) to cia402
net z-statusword lcec.0.2.cia-statusword => cia402.2.statusword
net z-opmode-display lcec.0.2.opmode-display => cia402.2.opmode-display
net z-drv-act-pos lcec.0.2.actual-position => cia402.2.drv-actual-position
net z-drv-act-velo lcec.0.2.actual-velocity => cia402.2.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net z-controlword cia402.2.controlword => lcec.0.2.cia-controlword
net z-modes-of-operation cia402.2.opmode => lcec.0.2.opmode
net z-drv-target-pos cia402.2.drv-target-position => lcec.0.2.target-position
net z-drv-target-velo cia402.2.drv-target-velocity => lcec.0.2.target-velocity
#*******************
# SPINDLE
#*******************
# --- joint signals for motion
net spindle-speed-cmd spindle.0.speed-out => cia402.3.velocity-cmd
net spindle-speed-fb cia402.3.velocity-fb => spindle.0.speed-in
net spindle-on spindle.0.on => cia402.3.enable
# --- ect60 settings
setp cia402.3.csp-mode 0
setp cia402.3.pos-scale 4000
setp cia402.3.velo-scale 400
# --- from servo(ethercat) to cia402
net s-statusword lcec.0.3.cia-statusword => cia402.3.statusword
net s-opmode-display lcec.0.3.opmode-display => cia402.3.opmode-display
net s-drv-act-pos lcec.0.3.actual-position => cia402.3.drv-actual-position
net s-drv-act-velo lcec.0.3.actual-velocity => cia402.3.drv-actual-velocity
# --- from cia402 to servo(ethercat)
net s-controlword cia402.3.controlword => lcec.0.3.cia-controlword
net s-modes-of-operation cia402.3.opmode => lcec.0.3.opmode
net s-drv-target-pos cia402.3.drv-target-position => lcec.0.3.target-position
net s-drv-target-velo cia402.3.drv-target-velocity => lcec.0.3.target-velocity
#*********************
# E-STOP
#*********************
setp iocontrol.0.emc-enable-in 1
loadrt hal_parport cfg="0 in"
addf parport.0.read servo-thread
#addf mux4.0 servo-thread
# Jog Pendant
loadrt encoder num_chan=1
loadrt mux4 count=1
addf encoder.capture-position servo-thread
addf encoder.update-counters servo-thread
addf mux4.0 servo-thread
# If your MPG outputs a quadrature signal per click set x4 to 1
# If your MPG puts out 1 pulse per click set x4 to 0
setp encoder.0.x4-mode 0
# For velocity mode, set to 1
# In velocity mode the axis stops when the dial is stopped
# even if that means the commanded motion is not completed,
# For position mode (the default), set to 0
# In position mode the axis will move exactly jog-scale
# units for each count, regardless of how long that might take,
setp axis.x.jog-vel-mode 0
setp axis.y.jog-vel-mode 0
setp axis.z.jog-vel-mode 0
# This sets the scale that will be used based on the input to the mux4
setp mux4.0.in0 0.1
setp mux4.0.in1 0.01
setp mux4.0.in2 0.001
# The inputs to the mux4 component
net scale1 mux4.0.sel0 <= parport.0.pin-08-in-not
net scale2 mux4.0.sel1 <= parport.0.pin-07-in-not
# The output from the mux4 is sent to each axis jog scale
net mpg-scale <= mux4.0.out
net mpg-scale => axis.x.jog-scale
net mpg-scale => axis.y.jog-scale
net mpg-scale => axis.z.jog-scale
# The MPG inputs
net mpg-a encoder.0.phase-A <= parport.0.pin-13-in
net mpg-b encoder.0.phase-B <= parport.0.pin-10-in
# The Axis select inputs
net mpg-x axis.x.jog-enable <= parport.0.pin-15-in-not
net mpg-y axis.y.jog-enable <= parport.0.pin-11-in
net mpg-z axis.z.jog-enable <= parport.0.pin-14-in
# The encoder output counts to the axis. Only the selected axis will move.
net encoder-counts <= encoder.0.counts
net encoder-counts => axis.x.jog-counts
net encoder-counts => axis.y.jog-counts
net encoder-counts => axis.z.jog-counts
lite@LinuxCNC:~$ sudo ethercat slaves
0 0:0 OP + L7EC-400S(COE)
1 0:1 OP + L7EC-400S(COE)
2 0:2 OP + L7EC-400S(COE)
3 0:3 PREOP E EM32DX-E4
/* Master 0, Slave 3, "EM32DX-E4"
* Vendor ID: 0x00004321
* Product code: 0x01100073
* Revision number: 0x18050210
*/
ec_pdo_entry_info_t slave_3_pdo_entries[] = {
{0x7000, 0x01, 16}, /* OUT */
{0x6000, 0x01, 16}, /* IN */
};
ec_pdo_info_t slave_3_pdos[] = {
{0x1600, 1, slave_3_pdo_entries + 0}, /* RxPDO0-Map */
{0x1a00, 1, slave_3_pdo_entries + 1}, /* TxPDO1-Map */
};
ec_sync_info_t slave_3_syncs[] = {
{0, EC_DIR_OUTPUT, 0, NULL, EC_WD_DISABLE},
{1, EC_DIR_INPUT, 0, NULL, EC_WD_DISABLE},
{2, EC_DIR_OUTPUT, 1, slave_3_pdos + 0, EC_WD_ENABLE},
{3, EC_DIR_INPUT, 1, slave_3_pdos + 1, EC_WD_DISABLE},
{0xff}
Please Log in or Create an account to join the conversation.
- scottlaird
-

- Offline
- Premium Member
-

Less
More
- Posts: 136
- Thank you received: 161
04 Aug 2024 03:36 #306895
by scottlaird
Replied by scottlaird on topic Hello, I would like to add an EtherCAT IO device. What should I do
Leadshine has an amazing ability to put out products with multiple names and not document them clearly (at least in English) for months after they start slipping into the channel. So I'm not sure exactly what a EM32DX-E4 is. I can find pictures, and a manual in Chinese (oss.leisai.com/uploadfiles/EM32DX-E4%20%...%8B%E5%86%8CV3_1.pdf) that I *think* says that it's a 16-port in, 16-port out digital I/O board with something somewhat odd about the first 8 digital inputs and 4 digital outputs
Ignoring the "something somewhat odd" part, it looks pretty straightforward, 16 ins packed together at 0x6000 and 16 outs at 0x7000. It'd be pretty straightforward to modify one of the other packed digital I/O board drivers to support this hardware.
github.com/linuxcnc-ethercat/linuxcnc-ethercat/issues/434
Ignoring the "something somewhat odd" part, it looks pretty straightforward, 16 ins packed together at 0x6000 and 16 outs at 0x7000. It'd be pretty straightforward to modify one of the other packed digital I/O board drivers to support this hardware.
github.com/linuxcnc-ethercat/linuxcnc-ethercat/issues/434
The following user(s) said Thank You: DPFlex
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12003
- Thank you received: 4084
04 Aug 2024 04:34 #306898
by rodw
Replied by rodw on topic Hello, I would like to add an EtherCAT IO device. What should I do
It seems very similar to the Rtelligent ECT1616 which was very easy to work out with a generic driver like I did here.
github.com/rodw-au/linuxcnc-cia402/blob/...hercat-conf.xml#L158
It has some PWM functions as well.
github.com/rodw-au/linuxcnc-cia402/blob/...hercat-conf.xml#L158
It has some PWM functions as well.
Please Log in or Create an account to join the conversation.
- onceloved
-

- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 59
04 Aug 2024 05:16 #306900
by onceloved
Replied by onceloved on topic Hello, I would like to add an EtherCAT IO device. What should I do
I think you are Chinese. If you are, add me on QQ and I will help you solve it.
 QQ:304394405
QQ:304394405
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- Ahmed.emara
- Offline
- Junior Member
-

Less
More
- Posts: 23
- Thank you received: 0
25 Dec 2025 17:57 #340500
by Ahmed.emara
Replied by Ahmed.emara on topic Hello, I would like to add an EtherCAT IO device. What should I do
Hello, i have R3EC leadshine io + DI + DO
Are you having same io system , if so could you please help me in writing the xml, i am stuck in the PDO mapping section
Are you having same io system , if so could you please help me in writing the xml, i am stuck in the PDO mapping section
Please Log in or Create an account to join the conversation.
- cekaa
-

- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
02 Apr 2026 11:13 #345057
by cekaa
Replied by cekaa on topic Hello, I would like to add an EtherCAT IO device. What should I do
Hi, I have the same problem. How did you switch to XML OP mode?
Leidshine em32dx-e
ceka@debian:~$ ethercat slave
0 0:0 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
1 0:1 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
2 0:2 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
3 0:3 PREOP E EM32DX-E4
ceka@debian:~$
main xml
slave idx="3" type="generic" vid="0x00004321" pid="0x01100073" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<!-- Digtial Outputs (RTEC1616)-->
<pdoEntry idx="0x7000," subIdx="01" bitLen="16" halType="complex">
<complexEntry bitLen="1" halPin="out-01" halType="bit"/>
<complexEntry bitLen="1" halPin="out-02" halType="bit"/>
<complexEntry bitLen="1" halPin="out-03" halType="bit"/>
<complexEntry bitLen="1" halPin="out-04" halType="bit"/>
<complexEntry bitLen="1" halPin="out-05" halType="bit"/>
<complexEntry bitLen="1" halPin="out-06" halType="bit"/>
<complexEntry bitLen="1" halPin="out-07" halType="bit"/>
<complexEntry bitLen="1" halPin="out-08" halType="bit"/>
<complexEntry bitLen="1" halPin="out-09" halType="bit"/>
<complexEntry bitLen="1" halPin="out-10" halType="bit"/>
<complexEntry bitLen="1" halPin="out-11" halType="bit"/>
<complexEntry bitLen="1" halPin="out-12" halType="bit"/>
<complexEntry bitLen="1" halPin="out-13" halType="bit"/>
<complexEntry bitLen="1" halPin="out-14" halType="bit"/>
<complexEntry bitLen="1" halPin="out-15" halType="bit"/>
<complexEntry bitLen="1" halPin="out-16" halType="bit"/>
</pdoEntry>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="0x1a00,">
<!-- Digtial_inputs -->
<pdoEntry idx="0x6000," subIdx="01" bitLen="32" halType="complex">
<complexEntry bitLen="1" halPin="in-01" halType="bit"/>
<complexEntry bitLen="1" halPin="in-02" halType="bit"/>
<complexEntry bitLen="1" halPin="in-03" halType="bit"/>
<complexEntry bitLen="1" halPin="in-04" halType="bit"/>
<complexEntry bitLen="1" halPin="in-05" halType="bit"/>
<complexEntry bitLen="1" halPin="in-06" halType="bit"/>
<complexEntry bitLen="1" halPin="in-07" halType="bit"/>
<complexEntry bitLen="1" halPin="in-08" halType="bit"/>
<complexEntry bitLen="1" halPin="in-09" halType="bit"/>
<complexEntry bitLen="1" halPin="in-10" halType="bit"/>
<complexEntry bitLen="1" halPin="in-11" halType="bit"/>
<complexEntry bitLen="1" halPin="in-12" halType="bit"/>
<complexEntry bitLen="1" halPin="in-13" halType="bit"/>
<complexEntry bitLen="1" halPin="in-14" halType="bit"/>
<complexEntry bitLen="1" halPin="in-15" halType="bit"/>
<complexEntry bitLen="1" halPin="in-16" halType="bit"/>
</pdoEntry>
</pdo>
</syncManager>
</slave>
</master>
</masters>
Leidshine em32dx-e
ceka@debian:~$ ethercat slave
0 0:0 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
1 0:1 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
2 0:2 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
3 0:3 PREOP E EM32DX-E4
ceka@debian:~$
main xml
slave idx="3" type="generic" vid="0x00004321" pid="0x01100073" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<!-- Digtial Outputs (RTEC1616)-->
<pdoEntry idx="0x7000," subIdx="01" bitLen="16" halType="complex">
<complexEntry bitLen="1" halPin="out-01" halType="bit"/>
<complexEntry bitLen="1" halPin="out-02" halType="bit"/>
<complexEntry bitLen="1" halPin="out-03" halType="bit"/>
<complexEntry bitLen="1" halPin="out-04" halType="bit"/>
<complexEntry bitLen="1" halPin="out-05" halType="bit"/>
<complexEntry bitLen="1" halPin="out-06" halType="bit"/>
<complexEntry bitLen="1" halPin="out-07" halType="bit"/>
<complexEntry bitLen="1" halPin="out-08" halType="bit"/>
<complexEntry bitLen="1" halPin="out-09" halType="bit"/>
<complexEntry bitLen="1" halPin="out-10" halType="bit"/>
<complexEntry bitLen="1" halPin="out-11" halType="bit"/>
<complexEntry bitLen="1" halPin="out-12" halType="bit"/>
<complexEntry bitLen="1" halPin="out-13" halType="bit"/>
<complexEntry bitLen="1" halPin="out-14" halType="bit"/>
<complexEntry bitLen="1" halPin="out-15" halType="bit"/>
<complexEntry bitLen="1" halPin="out-16" halType="bit"/>
</pdoEntry>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="0x1a00,">
<!-- Digtial_inputs -->
<pdoEntry idx="0x6000," subIdx="01" bitLen="32" halType="complex">
<complexEntry bitLen="1" halPin="in-01" halType="bit"/>
<complexEntry bitLen="1" halPin="in-02" halType="bit"/>
<complexEntry bitLen="1" halPin="in-03" halType="bit"/>
<complexEntry bitLen="1" halPin="in-04" halType="bit"/>
<complexEntry bitLen="1" halPin="in-05" halType="bit"/>
<complexEntry bitLen="1" halPin="in-06" halType="bit"/>
<complexEntry bitLen="1" halPin="in-07" halType="bit"/>
<complexEntry bitLen="1" halPin="in-08" halType="bit"/>
<complexEntry bitLen="1" halPin="in-09" halType="bit"/>
<complexEntry bitLen="1" halPin="in-10" halType="bit"/>
<complexEntry bitLen="1" halPin="in-11" halType="bit"/>
<complexEntry bitLen="1" halPin="in-12" halType="bit"/>
<complexEntry bitLen="1" halPin="in-13" halType="bit"/>
<complexEntry bitLen="1" halPin="in-14" halType="bit"/>
<complexEntry bitLen="1" halPin="in-15" halType="bit"/>
<complexEntry bitLen="1" halPin="in-16" halType="bit"/>
</pdoEntry>
</pdo>
</syncManager>
</slave>
</master>
</masters>
Attachments:
Please Log in or Create an account to join the conversation.
- cekaa
-
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
03 Apr 2026 12:13 #345102
by cekaa
Replied by cekaa on topic Hello, I would like to add an EtherCAT IO device. What should I do
Is there a place to learn how to use XML?
ceka@debian:~$ ethercat pdos
=== Master 0, Slave 2 ===
SM0: PhysAddr 0x1000, DefaultSize 64, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1100, DefaultSize 64, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1200, DefaultSize 6, ControlRegister 0x64, Enable 1
SM3: PhysAddr 0x1400, DefaultSize 12, ControlRegister 0x20, Enable 1
=== Master 0, Slave 3 ===
SM0: PhysAddr 0x1000, DefaultSize 128, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1400, DefaultSize 128, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1800, DefaultSize 5, ControlRegister 0x64, Enable 1
RxPDO 0x1600 "RxPDO0-Map"
PDO entry 0x7000:01, 16 bit, "OUT"
SM3: PhysAddr 0x1c00, DefaultSize 7, ControlRegister 0x20, Enable 1
TxPDO 0x1a00 "TxPDO1-Map"
PDO entry 0x6000:01, 16 bit, "IN"
ceka@debian:~$
ceka@debian:~$ ethercat pdos
=== Master 0, Slave 2 ===
SM0: PhysAddr 0x1000, DefaultSize 64, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1100, DefaultSize 64, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1200, DefaultSize 6, ControlRegister 0x64, Enable 1
SM3: PhysAddr 0x1400, DefaultSize 12, ControlRegister 0x20, Enable 1
=== Master 0, Slave 3 ===
SM0: PhysAddr 0x1000, DefaultSize 128, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1400, DefaultSize 128, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1800, DefaultSize 5, ControlRegister 0x64, Enable 1
RxPDO 0x1600 "RxPDO0-Map"
PDO entry 0x7000:01, 16 bit, "OUT"
SM3: PhysAddr 0x1c00, DefaultSize 7, ControlRegister 0x20, Enable 1
TxPDO 0x1a00 "TxPDO1-Map"
PDO entry 0x6000:01, 16 bit, "IN"
ceka@debian:~$
Please Log in or Create an account to join the conversation.
- Marcos DC
-

- Offline
- Senior Member
-

Less
More
- Posts: 74
- Thank you received: 47
04 Apr 2026 00:16 #345134
by Marcos DC
Replied by Marcos DC on topic Hello, I would like to add an EtherCAT IO device. What should I do
This is not really an XML problem.
The XML is just a configuration layer for PDO mapping.
What you actually need to understand is:
PDO structure (Rx/Tx)
Sync managers
How lcec interprets the XML
A good workflow is:
1 - Use ethercat pdos to discover the device
2 - Reproduce exactly the same structure in XML
3 - Only then refine HAL mapping
Quick question:
Your device reports:
PDO entry 0x6000:01, 16 bit
But in your XML you configured:
bitLen="32"
What do you think happens if the device expects 16 bits,
but the master tries to map 32 bits?
Also, check this:
<pdo idx="0x1a00,">
<pdoEntry idx="0x6000,">
Notice anything unusual there?
I would suggest:
- match the bit length exactly (16)
- remove the trailing commas
- start with a minimal mapping (no complexEntry)
Once it reaches OP, then split into bits.
The XML is just a configuration layer for PDO mapping.
What you actually need to understand is:
PDO structure (Rx/Tx)
Sync managers
How lcec interprets the XML
A good workflow is:
1 - Use ethercat pdos to discover the device
2 - Reproduce exactly the same structure in XML
3 - Only then refine HAL mapping
Quick question:
Your device reports:
PDO entry 0x6000:01, 16 bit
But in your XML you configured:
bitLen="32"
What do you think happens if the device expects 16 bits,
but the master tries to map 32 bits?
Also, check this:
<pdo idx="0x1a00,">
<pdoEntry idx="0x6000,">
Notice anything unusual there?
I would suggest:
- match the bit length exactly (16)
- remove the trailing commas
- start with a minimal mapping (no complexEntry)
Once it reaches OP, then split into bits.
The following user(s) said Thank You: cekaa, NWE
Please Log in or Create an account to join the conversation.
- cekaa
-
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
04 Apr 2026 06:37 #345146
by cekaa
Replied by cekaa on topic Hello, I would like to add an EtherCAT IO device. What should I do
I struggled a lot because it was a topic I didn't understand at all. I added the pdos and the lcec_configgen result, but I didn't understand what kind of structure I was supposed to create.
When 32 bit = 16 bit
ceka@debian:~$ ethercat slave
0 0:0 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
1 0:1 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
2 0:2 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
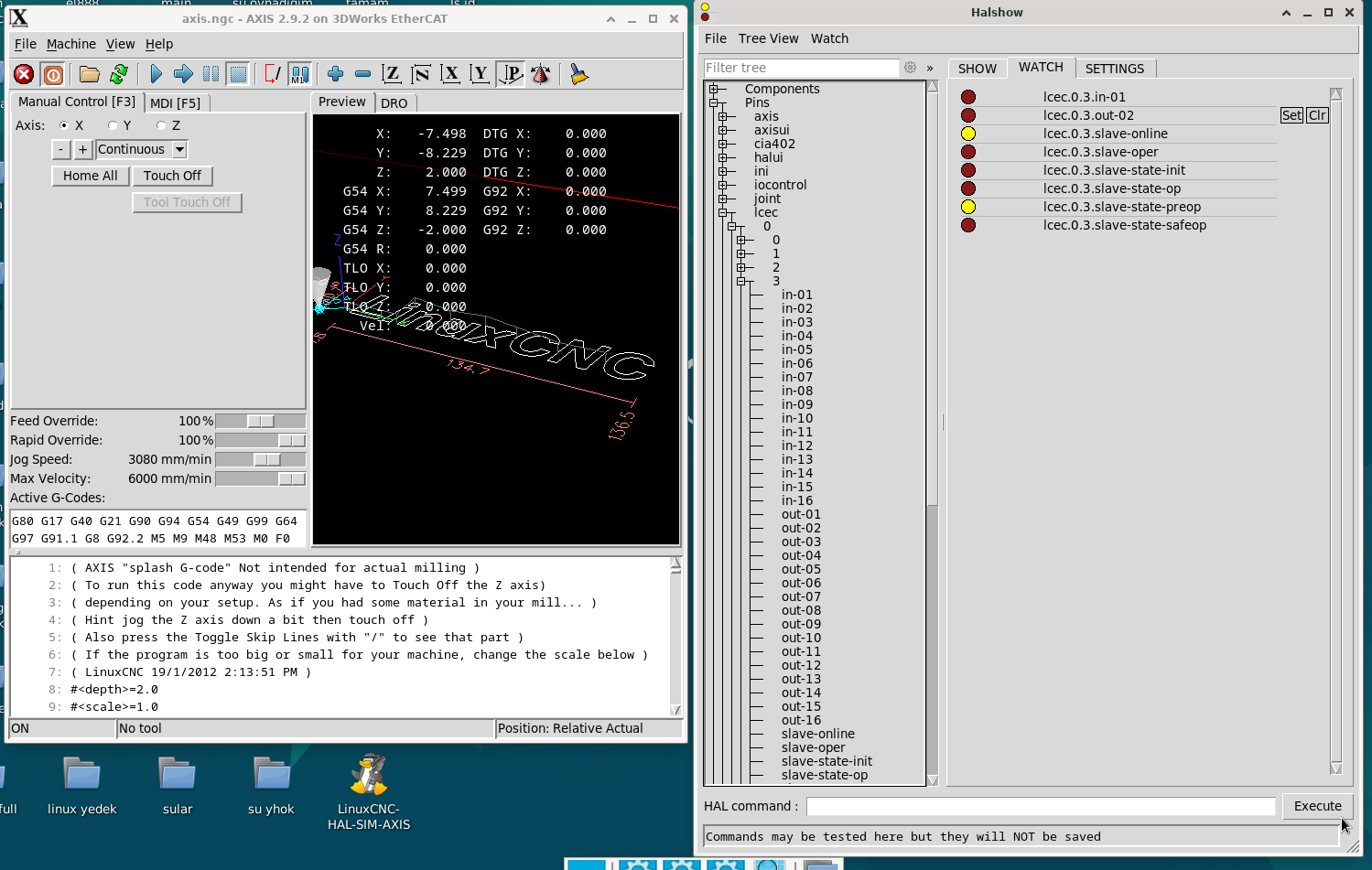
3 0:3 SAFEOP+ERROR E EM32DX-E4 ????????????????????????????????????????????
ceka@debian:~$
SAFEOP+ERROR E EM32DX-E4
old now
ceka@debian:~$ ethercat pdos
=== Master 0, Slave 3 ===
SM0: PhysAddr 0x1000, DefaultSize 128, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1400, DefaultSize 128, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1800, DefaultSize 5, ControlRegister 0x64, Enable 1
RxPDO 0x1600 "RxPDO0-Map"
PDO entry 0x7000:01, 16 bit, "OUT"
SM3: PhysAddr 0x1c00, DefaultSize 7, ControlRegister 0x20, Enable 1
TxPDO 0x1a00 "TxPDO1-Map"
PDO entry 0x6000:01, 16 bit, "IN"
ceka@debian:~$
lcec_configgen
<slave idx="3" type="generic" vid="0x00004321" pid="0x01100073" name="D4">
<!--EM32DX-E4-->
<syncManager idx="0" dir="in"/>
<syncManager idx="1" dir="out"/>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<!--RxPDO0-Map-->
<pdoEntry idx="7000" subIdx="01" bitLen="16" halPin="out" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<!--TxPDO1-Map-->
<pdoEntry idx="6000" subIdx="01" bitLen="16" halPin="in" halType="u32"/>
</pdo>
</syncManager>
</slave>
</master>
</masters>
ceka@debian:~$
Would the `lcec_configgen` command help? Could someone write the correct configuration for me?
When 32 bit = 16 bit
ceka@debian:~$ ethercat slave
0 0:0 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
1 0:1 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
2 0:2 OP + XINJE-DS5C1 EtherCAT(CoE) Drive Rev4.0 v3.7.70
3 0:3 SAFEOP+ERROR E EM32DX-E4 ????????????????????????????????????????????
ceka@debian:~$
SAFEOP+ERROR E EM32DX-E4
old now
ceka@debian:~$ ethercat pdos
=== Master 0, Slave 3 ===
SM0: PhysAddr 0x1000, DefaultSize 128, ControlRegister 0x26, Enable 1
SM1: PhysAddr 0x1400, DefaultSize 128, ControlRegister 0x22, Enable 1
SM2: PhysAddr 0x1800, DefaultSize 5, ControlRegister 0x64, Enable 1
RxPDO 0x1600 "RxPDO0-Map"
PDO entry 0x7000:01, 16 bit, "OUT"
SM3: PhysAddr 0x1c00, DefaultSize 7, ControlRegister 0x20, Enable 1
TxPDO 0x1a00 "TxPDO1-Map"
PDO entry 0x6000:01, 16 bit, "IN"
ceka@debian:~$
lcec_configgen
<slave idx="3" type="generic" vid="0x00004321" pid="0x01100073" name="D4">
<!--EM32DX-E4-->
<syncManager idx="0" dir="in"/>
<syncManager idx="1" dir="out"/>
<syncManager idx="2" dir="out">
<pdo idx="1600">
<!--RxPDO0-Map-->
<pdoEntry idx="7000" subIdx="01" bitLen="16" halPin="out" halType="u32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<!--TxPDO1-Map-->
<pdoEntry idx="6000" subIdx="01" bitLen="16" halPin="in" halType="u32"/>
</pdo>
</syncManager>
</slave>
</master>
</masters>
ceka@debian:~$
Would the `lcec_configgen` command help? Could someone write the correct configuration for me?
Please Log in or Create an account to join the conversation.
- Marcos DC
-
- Offline
- Senior Member
-
Less
More
- Posts: 74
- Thank you received: 47
04 Apr 2026 07:18 #345147
by Marcos DC
Replied by Marcos DC on topic Hello, I would like to add an EtherCAT IO device. What should I do
from your latest output, both PDO entries are clearly 16-bit and your XML uses bitLen="16", so that part looks correct.
also, halType="u32" does not mean the PDO is 32-bit. It only affects how the value is exposed in HAL.
it doesn't look like a bit length issue anymore.
given that, I would focus on:
- XML syntax issues (even a small typo can break it, and LinuxCNC may stay silent — checking dmesg helps here)
- verifying that the PDO/SM structure matches exactly what `ethercat pdos` reports
- keeping the mapping minimal until it reaches OP
once it reaches OP, then refine the mapping.
also, halType="u32" does not mean the PDO is 32-bit. It only affects how the value is exposed in HAL.
it doesn't look like a bit length issue anymore.
given that, I would focus on:
- XML syntax issues (even a small typo can break it, and LinuxCNC may stay silent — checking dmesg helps here)
- verifying that the PDO/SM structure matches exactly what `ethercat pdos` reports
- keeping the mapping minimal until it reaches OP
once it reaches OP, then refine the mapping.
The following user(s) said Thank You: cekaa
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Hello, I would like to add an EtherCAT IO device. What should I do
Time to create page: 0.376 seconds