- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Step By Step Help Needed . EL8 Leadshine to PI 5
Step By Step Help Needed . EL8 Leadshine to PI 5
- Will_cnc
- Offline
- Junior Member
-

Less
More
- Posts: 32
- Thank you received: 1
03 Jul 2025 19:13 #331180
by Will_cnc
Step By Step Help Needed . EL8 Leadshine to PI 5 was created by Will_cnc
Hi all,For context: I'm currently building the control system for a Samurai 120 CNC machine (please see the attached photo).Machine electronic hardware configuration:
Could someone please provide a step-by-step on how to configure Linux CNC for my current setup? Any help would be greatly appreciated!
I intend on eventually using the probe basic user interface as I an touchscreen this would work well with. https://samuraimachinetools.com/cdn/shop/files/IMG_9964.jpg?v=1722652171&width=1445
- 3 × Leadshine EL8 EtherCAT servo drives
- 2 × 400W Leadshine motors with optical encoders and battery backup
- 1 × 400W Leadshine motor with motor brake, also with optical encoder and battery backup
- 1 × Beckhoff EK1100 EtherCAT coupler
- 1 × Raspberry Pi 5 for control
- Successfully installed LinuxCNC on the Raspberry Pi 5
- Updated to the latest version
- Installed CIA402 using Rodw’s guide
- Configured the Pi as an EtherCAT master
- – Loads the user interface and references the
.ini
file.hal
- – The Hardware Abstraction Layer, which defines machine characteristics and connects components
.hal
- – Extracts and defines information from the servo drives
.xml
Could someone please provide a step-by-step on how to configure Linux CNC for my current setup? Any help would be greatly appreciated!
I intend on eventually using the probe basic user interface as I an touchscreen this would work well with. https://samuraimachinetools.com/cdn/shop/files/IMG_9964.jpg?v=1722652171&width=1445
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4643
10 Jul 2025 08:59 #331620
by andypugh
Replied by andypugh on topic Step By Step Help Needed . EL8 Leadshine to PI 5
I know someone else with this config, and he has written a walkthrough. I will ask him to post it.
The following user(s) said Thank You: Will_cnc
Please Log in or Create an account to join the conversation.
- ShemJ
-
- Offline
- New Member
-

Less
More
- Posts: 10
- Thank you received: 3
10 Jul 2025 11:48 #331624
by ShemJ
Replied by ShemJ on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Hello Will,I am also new to the world of LinuxCNC and servos. It can be a lot to take in. I have been working on a Marco Reps clone box as well and have a thorough walkthrough for the process so far. I'm stuck on getting gantry mode working but it looks like you won't have that problem. I have also provided two config files. The modello config is setup as a gantry mode, but I have tried a probe basic config with 3 axis in trying to master/slave the gantry servos via RS 485 cable rather than in LinuxCNC. That should work for your system. You will still need to comment out various bits in the files regarding the LS510 VFD and the xhc-whb04b handheld controller if you are not using this hardware. I am leaving for vacation today but let me know how you get on.
The following user(s) said Thank You: andypugh, tommylight, Will_cnc
Please Log in or Create an account to join the conversation.
- Will_cnc
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 1
11 Sep 2025 19:48 #334843
by Will_cnc
Replied by Will_cnc on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Hi Shemj,Thank you so much for your help with getting the EtherCAT drives set up! Following your guide, I’ve successfully managed to connect all three drives, and they’re now running with the Probe Basic interface. The only step left is calibrating them to get the correct mm/rev on each axis.I’d really appreciate some suggestions on how to connect the spindle drive:


- Current setup:
- The machine’s three axes are using EtherCAT, connected through a daisy chain of Ethernet cables.
- The spindle came with a 1.2 kW generic Chinese servo motor and drive, which has a 15-pin RS-232 serial connector.
- Questions/options I’m exploring:
- Using Beckhoff hardware:
- I have a Beckhoff EK1100. Could this be used with the appropriate module to control the spindle servo drive?
- Using a Mesa board:
- Would connecting a Mesa board to the Pi via a USB-to-Ethernet adapter work, or would that introduce unnecessary complications?
- Alternative hardware setup:
- Replace the Pi 5 with something like an Odroid H4 (dual Ethernet ports). That way one port could handle the Mesa board and the other the EtherCAT drives.
- Replacing the spindle drive:
- The supplied spindle drive is an XCSD-20A from cncservocontrol.com. Are there any EtherCAT-compatible alternatives that would work with my motor?
- Using Beckhoff hardware:
- Motor details:
- Model: 80ST-M04030LBP
- Power: 1.2 kW
- Current: 5.2 A
- Voltage: 220 V
- Torque: 4.0 N·m
- Speed: 3000 rpm
- Encoder: 2500 PPR
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
12 Sep 2025 08:34 #334870
by Hakan
Replied by Hakan on topic Step By Step Help Needed . EL8 Leadshine to PI 5
I used a servo motor and that type of servo drive for the spindle motor of my lathe.
It is not ideal. The thing is that linuxcnc just sets a spindle speed and the servo motor
does a really quick acceleration to get to that speed. There is no ramping up/ramping down
like an axis motion. Someone of course solved that, just didn't know about it forum.linuxcnc.org/10-advanced-configura...op-on-m-stop-command
Controlled by analog +- 10V, Beckhoff has many EtherCAT modules for that, EL4xxx series.
Mesa and EtherCAT works well together on different network adapters. Not USB network adapter, USB isn't real-time.
There are many N150 with multiple adapters, and the Odroid H4 plus isn't a bad choice either. If you can choose, choose an Intel network adapter.
EL4xx or Mesa + other computer or EtherCAT servo drive.
Your motor is a very common motor so any EtherCAT servo drive of the right size should in principle work. Ask seller though.
You do want a drive with the PV mode (Profile Velocity). That way the drive will be able to ramp up and down
the rotational speed in a controlled way.
It is not ideal. The thing is that linuxcnc just sets a spindle speed and the servo motor
does a really quick acceleration to get to that speed. There is no ramping up/ramping down
like an axis motion. Someone of course solved that, just didn't know about it forum.linuxcnc.org/10-advanced-configura...op-on-m-stop-command
Controlled by analog +- 10V, Beckhoff has many EtherCAT modules for that, EL4xxx series.
Mesa and EtherCAT works well together on different network adapters. Not USB network adapter, USB isn't real-time.
There are many N150 with multiple adapters, and the Odroid H4 plus isn't a bad choice either. If you can choose, choose an Intel network adapter.
EL4xx or Mesa + other computer or EtherCAT servo drive.
Your motor is a very common motor so any EtherCAT servo drive of the right size should in principle work. Ask seller though.
You do want a drive with the PV mode (Profile Velocity). That way the drive will be able to ramp up and down
the rotational speed in a controlled way.
Please Log in or Create an account to join the conversation.
- Will_cnc
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 1
17 Oct 2025 17:15 #336612
by Will_cnc
Replied by Will_cnc on topic Step By Step Help Needed . EL8 Leadshine to PI 5
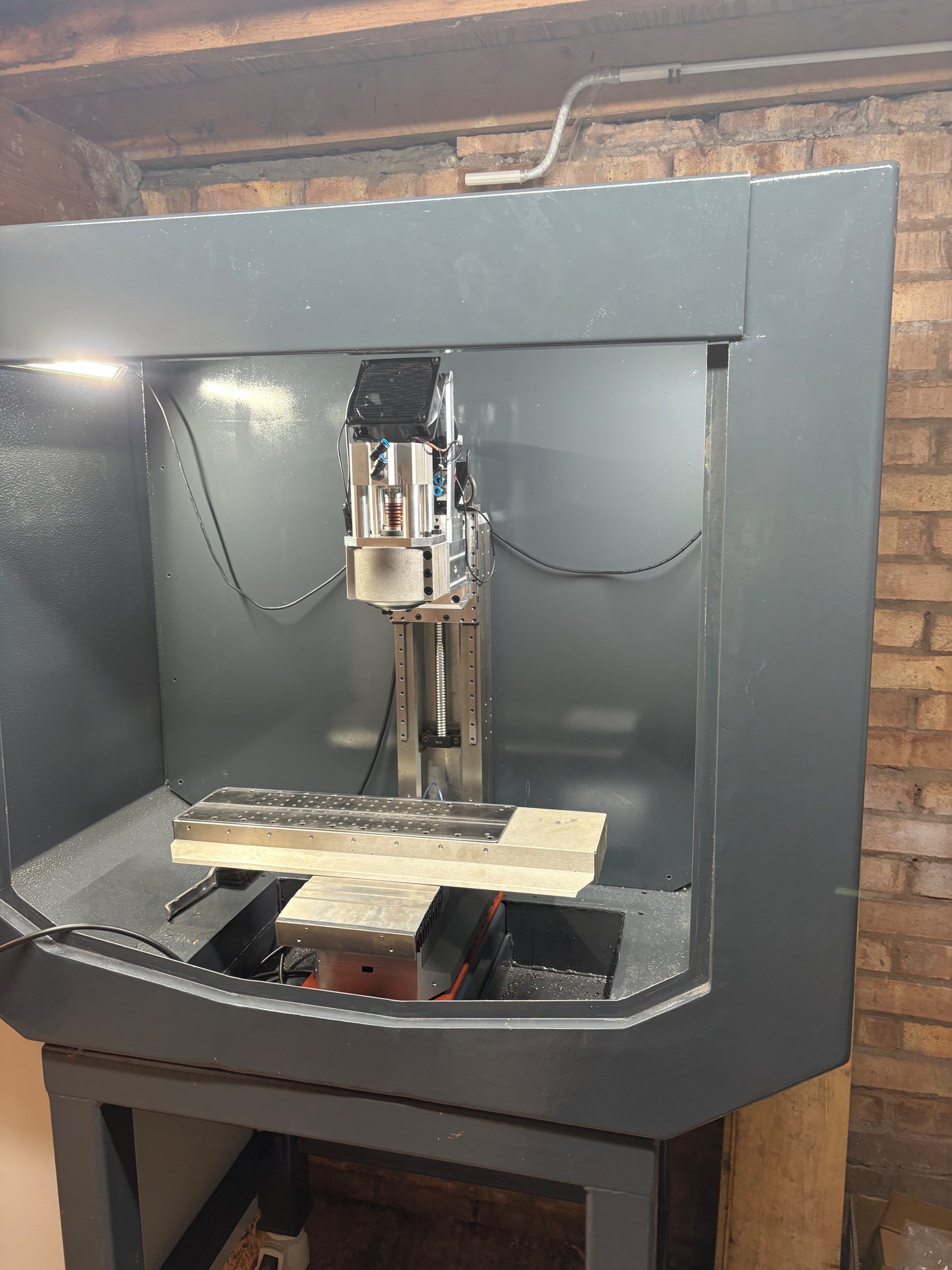
Thank you for the suggestions on what to use for the spindle motor. For now, I’ve replaced the spindle motor with another servo motor that is CiA402 compliant. I haven’t set it up yet, as I’ve been building an enclosure to suit and recently started back at university.
Disclaimer: The machine has been set up using the instructions kindly shared by Shemj.
Probe Basic Machine Interface Issues
1. Unable to home the machine
When I try to use the on-screen buttons to either home the machine or move to the work zero position, nothing happens. Is there something I might be missing in the setup?
this could be to do with the always_homed and homecomp files ? 2. Machine losing position after power-off
When I power off the controller and machine, I expect it to retain its position thanks to the battery backup on the drives. However, when I power it back on, each axis resets to zero instead of remembering its last position. Could this be related to the homing module setup? 3. Lack of continuous jogging in Probe Basic
In other interfaces, there’s an option to jog either continuously or incrementally. Does Probe Basic only support incremental jogging, or is there a way to enable continuous jogging that I’ve overlooked?
Thanks will
Photo:
Here’s a photo showing the start of the enclosure build — it’s still a work in progress.
When I try to use the on-screen buttons to either home the machine or move to the work zero position, nothing happens. Is there something I might be missing in the setup?
this could be to do with the always_homed and homecomp files ? 2. Machine losing position after power-off
When I power off the controller and machine, I expect it to retain its position thanks to the battery backup on the drives. However, when I power it back on, each axis resets to zero instead of remembering its last position. Could this be related to the homing module setup? 3. Lack of continuous jogging in Probe Basic
In other interfaces, there’s an option to jog either continuously or incrementally. Does Probe Basic only support incremental jogging, or is there a way to enable continuous jogging that I’ve overlooked?
Thanks will
Photo:
Here’s a photo showing the start of the enclosure build — it’s still a work in progress.
Attachments:
Please Log in or Create an account to join the conversation.
- unknown
- Offline
- Platinum Member
-
Less
More
- Posts: 888
- Thank you received: 325
17 Oct 2025 17:42 #336615
by unknown
Replied by unknown on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Waveshare do an add ethernet adaptor that connects via the pcie bus, they also do one that has a Nvme drive and an ethernet adaptor.
The Odroids have Realtek adapters, so there's that to think about, but I didn't have any issues although I did install the dkms drivers. Then again the Odroid has Nvme and sata ports built in, so no extra $$$ in that respect.
The N100 with Intel hardware sounds like worthy advice. Decisions decisions.
The Odroids have Realtek adapters, so there's that to think about, but I didn't have any issues although I did install the dkms drivers. Then again the Odroid has Nvme and sata ports built in, so no extra $$$ in that respect.
The N100 with Intel hardware sounds like worthy advice. Decisions decisions.
Please Log in or Create an account to join the conversation.
- ShemJ
-
- Offline
- New Member
-
Less
More
- Posts: 10
- Thank you received: 3
22 Oct 2025 22:48 #336909
by ShemJ
Replied by ShemJ on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Hi Will, I am using the waveshare PCIe TO Gigabit ETH USB3.2 HAT+ which is working well and has some extra USB ports if needed. I was getting some power dropouts when using a 5v 3a power supply so be sure to use a 5v 5a one that works.
I’ve made some further progress and have probe basic working well. I might be able to help you out with the homing issues more directly.
unknown, I might be looking to test an Odroid H4+ and you seem to be the main proponent for them. I have had some slowness on the pi in a couple of cases with ethercat chatter to and from the drives and monitoring Ferror. But I think they’re just fine generally. Have you tried the H4+? I believe it has 2x 2.5gb intel I226-v NICs so avoids the realtek issue. Is there any other tweaking involved in getting them set up?
I’ve made some further progress and have probe basic working well. I might be able to help you out with the homing issues more directly.
unknown, I might be looking to test an Odroid H4+ and you seem to be the main proponent for them. I have had some slowness on the pi in a couple of cases with ethercat chatter to and from the drives and monitoring Ferror. But I think they’re just fine generally. Have you tried the H4+? I believe it has 2x 2.5gb intel I226-v NICs so avoids the realtek issue. Is there any other tweaking involved in getting them set up?
Please Log in or Create an account to join the conversation.
- unknown
- Offline
- Platinum Member
-
Less
More
- Posts: 888
- Thank you received: 325
23 Oct 2025 06:57 #336940
by unknown
Replied by unknown on topic Step By Step Help Needed . EL8 Leadshine to PI 5
I haven't had a chance, honestly I don't think I could justify one ATM. The old tech budget has taken a beating already this year.
The Intel NICs sounds like a good idea.
The Intel NICs sounds like a good idea.
Please Log in or Create an account to join the conversation.
- jrc
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 1
02 Feb 2026 09:08 - 02 Feb 2026 09:09 #342308
by jrc
Replied by jrc on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Very nice enclosure!
I am also building a Samurai 120 with Leadshine EL8's and LinuxCNC.
My own enclosure is made from aluminium extrusions and is nowhere near as nice as yours.
My solution to the spindle drive problem has been to use a Leadshine EL8-1000 drive and a Leadshine ELM2-1000 motor for the spindle, replacing the original motor and drive. The new drive and motor are 1000W instead of the 1200W of the original Samurai but the motor is a straight drop-in replacement (same mounting holes and hardware, slightly shorter motor overall) and seems both very well built and with a decent overload margin so I suspect the final performance will be very close if not the same, and sticking with EL8's throughout means only one learning curve for manufacturer quirks etc.
When you do that, the same Marco Reps LinuxCNC servo scheme works for driving the spindle, except that the EL8 settings are slightly different to his Metronix spindle settings (for example Leadshine does in PDO idx 1601 a lot of what Metronix does in PDO idx 1600). You also need to factor in the belt ratio from motor to spindle to get the right RPM.
I am also adding small pneumatic cylinders to pull up a bit on the spindle carriage and take the Z-axis weight load, mounted with some sheet metal brackets I ordered from PCBWay that attach around the Z-axis motor atop the column.
I am also building a Samurai 120 with Leadshine EL8's and LinuxCNC.
My own enclosure is made from aluminium extrusions and is nowhere near as nice as yours.
My solution to the spindle drive problem has been to use a Leadshine EL8-1000 drive and a Leadshine ELM2-1000 motor for the spindle, replacing the original motor and drive. The new drive and motor are 1000W instead of the 1200W of the original Samurai but the motor is a straight drop-in replacement (same mounting holes and hardware, slightly shorter motor overall) and seems both very well built and with a decent overload margin so I suspect the final performance will be very close if not the same, and sticking with EL8's throughout means only one learning curve for manufacturer quirks etc.
When you do that, the same Marco Reps LinuxCNC servo scheme works for driving the spindle, except that the EL8 settings are slightly different to his Metronix spindle settings (for example Leadshine does in PDO idx 1601 a lot of what Metronix does in PDO idx 1600). You also need to factor in the belt ratio from motor to spindle to get the right RPM.
I am also adding small pneumatic cylinders to pull up a bit on the spindle carriage and take the Z-axis weight load, mounted with some sheet metal brackets I ordered from PCBWay that attach around the Z-axis motor atop the column.
Last edit: 02 Feb 2026 09:09 by jrc. Reason: typo
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Step By Step Help Needed . EL8 Leadshine to PI 5
Time to create page: 0.245 seconds