Search Results (Searched for: )
- tommylight

02 Aug 2024 19:59
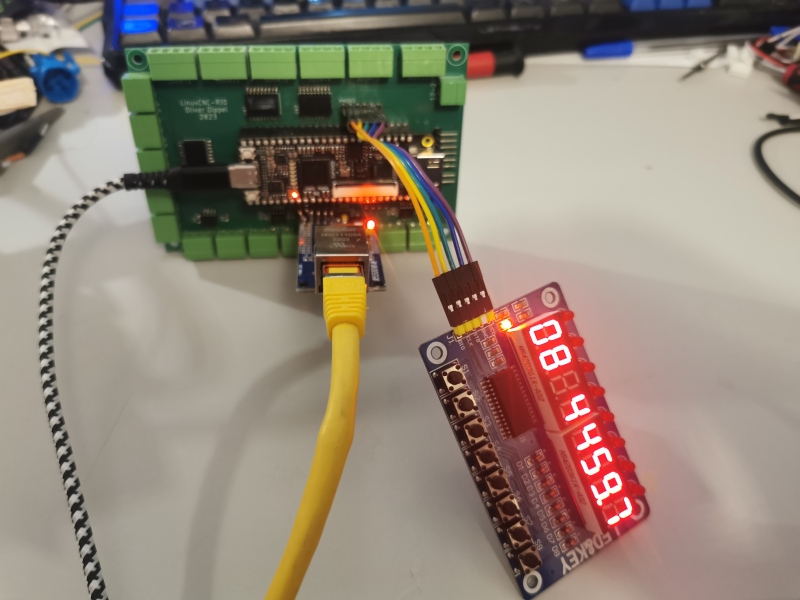
Replied by tommylight on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- tommylight
02 Aug 2024 19:58
Replied by tommylight on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- Aciera

02 Aug 2024 19:56
- tommylight
02 Aug 2024 19:56
Replied by tommylight on topic linuxcnc 2.9.2 ethercat problem
linuxcnc 2.9.2 ethercat problem
Category: EtherCAT
- tommylight
02 Aug 2024 19:52
Replied by tommylight on topic linuxcnc 2.9.2 ethercat problem
linuxcnc 2.9.2 ethercat problem
Category: EtherCAT
- Moutomation
- Moutomation
02 Aug 2024 19:50
Replied by Moutomation on topic linuxcnc 2.9.2 ethercat problem
linuxcnc 2.9.2 ethercat problem
Category: EtherCAT
- endian

02 Aug 2024 19:46
Replied by endian on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- Moutomation
- Moutomation
02 Aug 2024 19:45
Replied by Moutomation on topic linuxcnc 2.9.2 ethercat problem
linuxcnc 2.9.2 ethercat problem
Category: EtherCAT
- tommylight
02 Aug 2024 19:36
- endian
02 Aug 2024 19:32
Replied by endian on topic Exotic data types in .xml config
Exotic data types in .xml config
Category: EtherCAT
- Aciera
02 Aug 2024 19:30
Replied by Aciera on topic linuxcnc 2.9.2 ethercat problem
linuxcnc 2.9.2 ethercat problem
Category: EtherCAT
- meister
- meister
02 Aug 2024 19:29 - 02 Aug 2024 21:53
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware

- meister
- meister
02 Aug 2024 19:28
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware


- endian
02 Aug 2024 19:24
Replied by endian on topic Exotic data types in .xml config
Exotic data types in .xml config
Category: EtherCAT
- spumco
- spumco
02 Aug 2024 19:12
Replied by spumco on topic Hardware needed to switch from mach 3 6 axis to linuxcnc 9 axis
Hardware needed to switch from mach 3 6 axis to linuxcnc 9 axis
Category: General LinuxCNC Questions
Time to create page: 0.465 seconds