Gmoccapy with jog encoder
- RotarySMP
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1630
- Thank you received: 595
04 Dec 2020 18:22 #191053
by RotarySMP
Gmoccapy with jog encoder was created by RotarySMP
I have my MPG connected similar in this example:
gnipsel.com/linuxcnc/hardware/mpg.html
... but with both joints and axis connections and enabled.
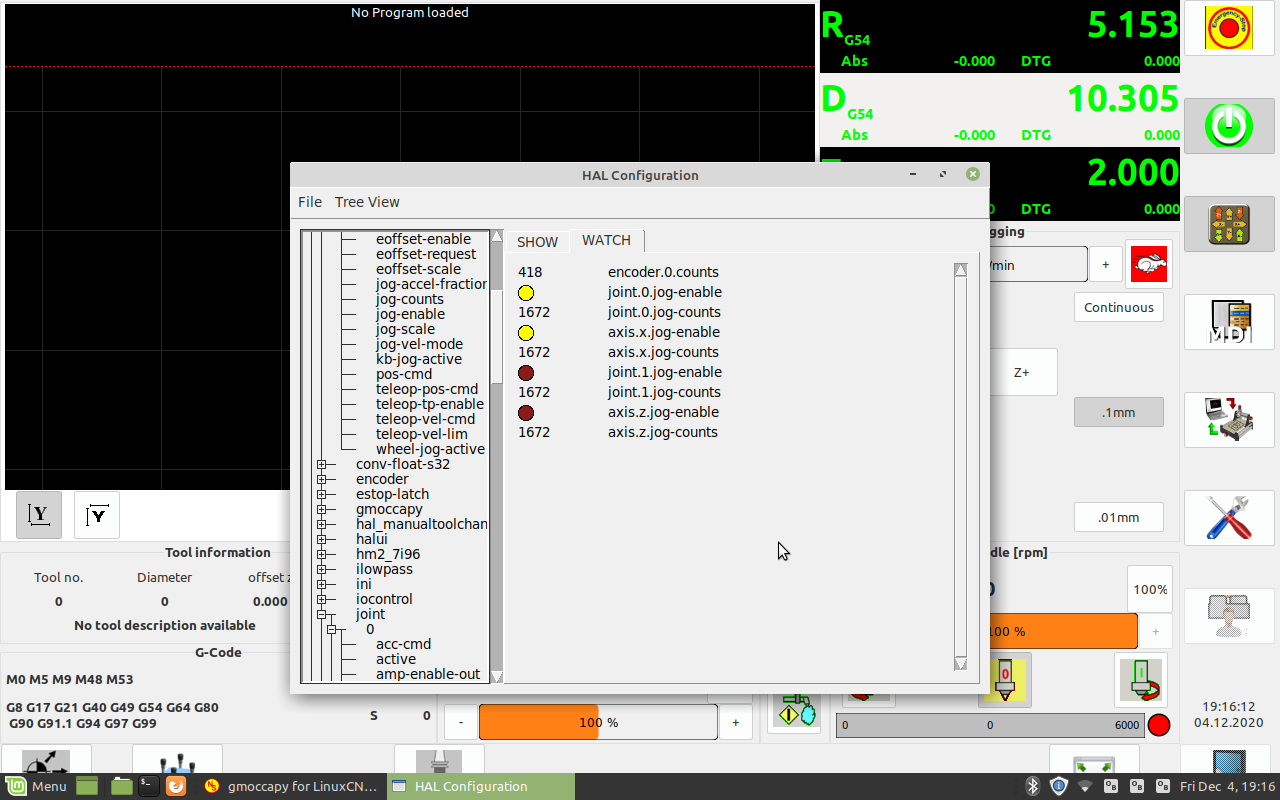
The whole signal change works in HALSHOW, with encoder movement changing all the counts through to those axis/joint pins, but no motion. The appropriate axis.x.jog-enable (or axis.z.jog-enable) are both connected and working, but no motion happens. I have done a fair bit of searching but find no reference to Gmoccapy specific pins or settings I need for this to work.
It make no difference whether the axis is homed or not. No motion.
I have attached the postgui HAL. Appreciate some assistance here. Thanks.
Mark
gnipsel.com/linuxcnc/hardware/mpg.html
... but with both joints and axis connections and enabled.
The whole signal change works in HALSHOW, with encoder movement changing all the counts through to those axis/joint pins, but no motion. The appropriate axis.x.jog-enable (or axis.z.jog-enable) are both connected and working, but no motion happens. I have done a fair bit of searching but find no reference to Gmoccapy specific pins or settings I need for this to work.
It make no difference whether the axis is homed or not. No motion.
I have attached the postgui HAL. Appreciate some assistance here. Thanks.
Mark
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
Less
More
- Posts: 12014
- Thank you received: 4097
04 Dec 2020 20:05 #191061
by rodw
Replied by rodw on topic Gmoccapy with jog encoder
Mark, there is a step by step guide in my build (for a 7i76e)
forum.linuxcnc.org/show-your-stuff/32029...build?start=20#85279
Hope it helps.
forum.linuxcnc.org/show-your-stuff/32029...build?start=20#85279
Hope it helps.
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1630
- Thank you received: 595
04 Dec 2020 20:47 #191068
by RotarySMP
Replied by RotarySMP on topic Gmoccapy with jog encoder
Hi Rod,
Thanks, but your HAL also ends with the encoder counts being netted to axis.[].jog-counts, which is what I also have. The encoder pulses are also working through to that point. That axis.[].jog-counts changes as I turn the encoder wheel. There is also an axis enabled, but nothing moves.
Mark
Thanks, but your HAL also ends with the encoder counts being netted to axis.[].jog-counts, which is what I also have. The encoder pulses are also working through to that point. That axis.[].jog-counts changes as I turn the encoder wheel. There is also an axis enabled, but nothing moves.
Mark
Please Log in or Create an account to join the conversation.
- newbynobi
-

- Offline
- Moderator
-

Less
More
- Posts: 1931
- Thank you received: 394
05 Dec 2020 10:29 #191114
by newbynobi
Replied by newbynobi on topic Gmoccapy with jog encoder
I am not at home, but out off memory:
- Did you set a jog scale / jog-increment?
I do not know the exact Hal pin name, but I remeber, when I added my first jog-wheel to my machine, about 15 years ago, I had exactly the problem you explained, due to not having set a jog increment with "setp axis-x-jog-increment 0.05" (something similar)
Norbert
- Did you set a jog scale / jog-increment?
I do not know the exact Hal pin name, but I remeber, when I added my first jog-wheel to my machine, about 15 years ago, I had exactly the problem you explained, due to not having set a jog increment with "setp axis-x-jog-increment 0.05" (something similar)
Norbert
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12014
- Thank you received: 4097
05 Dec 2020 10:30 #191115
by rodw
Replied by rodw on topic Gmoccapy with jog encoder
Yes, norbert is reinforcing what PCW has said earlier and is what is missing from your config compared with mine.
Please Log in or Create an account to join the conversation.
- newbynobi
-
- Offline
- Moderator
-
Less
More
- Posts: 1931
- Thank you received: 394
05 Dec 2020 13:45 #191123
by newbynobi
Replied by newbynobi on topic Gmoccapy with jog encoder
Please find attached my config for my pendant based on a 7i73 connected to a 7i76e, My pendant does contain Jog increment selector, Axis selector an 100 ppr MPG and a security button, that mus be held pushed as long as the control is used.
This config may help as start point.
Or try just to add to your config something like:
setp joint.0.jog-scale 0.05
setp joint.1.jog-scale 0.05
setp joint.2.jog-scale 0.05
setp axis.x.jog-scale 0.05
setp axis.y.jog-scale 0.05
setp axis.z.jog-scale 0.05
the 0.05 is machine units per count!
Norbert
This config may help as start point.
########################################
# 7i73 hal connections for the MPG #
# (c) Norbert Schechner #
########################################
net jog-wheel-counts joint.0.jog-counts <= hm2_7i76e.0.7i73.0.1.enc0.count
net jog-wheel-counts joint.1.jog-counts
net jog-wheel-counts joint.2.jog-counts
net jog-wheel-counts axis.x.jog-counts
net jog-wheel-counts axis.y.jog-counts
net jog-wheel-counts axis.z.jog-counts
loadrt mux2 names=jog-mode-sel
addf jog-mode-sel servo-thread
net jog-scale-out jog-mode-sel.in0 <= gmoccapy.jog.jog-increment
setp jog-mode-sel.in1 0.050
# need to get the jog mode
# Mode 0 alle Schritte werden ausgeführt, Mode 1 Drehen stopt, auch Axis stopt
net jog-vel-mode gmoccapy.jog.jog-inc-0 <= jog-mode-sel.sel <= hm2_7i76e.0.7i73.0.1.input-07
net jog-vel-mode joint.0.jog-vel-mode
net jog-vel-mode joint.1.jog-vel-mode
net jog-vel-mode joint.2.jog-vel-mode
net jog-vel-mode axis.x.jog-vel-mode
net jog-vel-mode axis.y.jog-vel-mode
net jog-vel-mode axis.z.jog-vel-mode
# already connected cont_joging on jog vel mode selection
# net jog_cont gmoccapy.jog.jog-inc-0 <= hm2_7i76e.0.7i73.0.1.input-07
net jog_1000 gmoccapy.jog.jog-inc-1 <= hm2_7i76e.0.7i73.0.1.input-06
net jog_0100 gmoccapy.jog.jog-inc-2 <= hm2_7i76e.0.7i73.0.1.input-05
net jog_0010 gmoccapy.jog.jog-inc-3 <= hm2_7i76e.0.7i73.0.1.input-04
net jog_0001 gmoccapy.jog.jog-inc-4 <= hm2_7i76e.0.7i73.0.1.input-03
net jog_scale-out joint.0.jog-scale <= jog-mode-sel.out
net jog_scale-out joint.1.jog-scale
net jog_scale-out joint.2.jog-scale
net jog_scale-out axis.x.jog-scale
net jog_scale-out axis.y.jog-scale
net jog_scale-out axis.z.jog-scale
# loaded at estop_and_enable.hal
loadrt and2 names=and_x,and_y,and_z
addf and_x servo-thread
addf and_y servo-thread
addf and_z servo-thread
# Freigabesignal erforderlich !
net freigabe and_x.in0 <= hm2_7i76e.0.7i73.0.1.input-15-not
net jog-x-selected and_x.in1 <= hm2_7i76e.0.7i73.0.1.input-14-not
net freigabe and_y.in0
net jog-y-selected and_y.in1 <= hm2_7i76e.0.7i73.0.1.input-13-not
net freigabe and_z.in0
net jog-z-selected and_z.in1 <= hm2_7i76e.0.7i73.0.1.input-12-not
net jog-x-enable joint.0.jog-enable <= and_x.out
net jog-x-enable axis.x.jog-enable
net jog-y-enable joint.1.jog-enable <= and_y.out
net jog-y-enable axis.y.jog-enable
net jog-z-enable joint.2.jog-enable <= and_z.out
net jog-z-enable axis.z.jog-enable
Or try just to add to your config something like:
setp joint.0.jog-scale 0.05
setp joint.1.jog-scale 0.05
setp joint.2.jog-scale 0.05
setp axis.x.jog-scale 0.05
setp axis.y.jog-scale 0.05
setp axis.z.jog-scale 0.05
the 0.05 is machine units per count!
Norbert
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1630
- Thank you received: 595
06 Dec 2020 17:07 #191238
by RotarySMP
Replied by RotarySMP on topic Gmoccapy with jog encoder
Thanks Rod and Norbert, I think my Gedenkfehler was I thought you have the external increment switch control the GUI buttons, and then the machine follows that.
I did get it working once Rod convinced me to ignore the GUI for this. Afterwards I also added a second set of nets so the one screen GUI follows along with what the phsical switches are doing.
Here is the current HAL:
forum.linuxcnc.org/media/kunena/attachments/2917/mpg.hal
I also now realise that I don't need the "Continuous" jog selection on the MPG. That is only really used with button jogging isnt it?
Mark
I did get it working once Rod convinced me to ignore the GUI for this. Afterwards I also added a second set of nets so the one screen GUI follows along with what the phsical switches are doing.
Here is the current HAL:
forum.linuxcnc.org/media/kunena/attachments/2917/mpg.hal
I also now realise that I don't need the "Continuous" jog selection on the MPG. That is only really used with button jogging isnt it?
Mark
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12014
- Thank you received: 4097
06 Dec 2020 20:58 #191249
by rodw
Replied by rodw on topic Gmoccapy with jog encoder
Great. You answered my question I asked on your video post. Yes continuous is handy on the screen but not used with a MPG. Just wind harder!
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1630
- Thank you received: 595
06 Dec 2020 21:01 #191251
by RotarySMP
Replied by RotarySMP on topic Gmoccapy with jog encoder
So now my engraving is both ugly and wrong  .
.
.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 12014
- Thank you received: 4097
06 Dec 2020 21:10 #191252
by rodw
Replied by rodw on topic Gmoccapy with jog encoder
Well you could pretend it was an Ugly 0 for off not a C and set it up so the jogs were disabled....
C = disabled sounds good!
C = disabled sounds good!
The following user(s) said Thank You: RotarySMP
Please Log in or Create an account to join the conversation.
Moderators: newbynobi, HansU
Time to create page: 0.126 seconds