THC for Hypertherm 45XP based on DT-115 / LM393 comparator
- radek_marko
- Offline
- Senior Member
-

Less
More
- Posts: 73
- Thank you received: 18
31 Oct 2020 10:47 - 31 Oct 2020 10:48 #187885
by radek_marko
Replied by radek_marko on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
It looks like my calculations are correct.
Next question - in my INI file, do I need to load torchud.hal and thc.hal of the hall files as per Tommylight's example below?
Tommy's file
My INI file
Next question - in my INI file, do I need to load torchud.hal and thc.hal of the hall files as per Tommylight's example below?
Tommy's file
[HAL]
# HALUI to interact with NML
# Run before any other HALFILE
HALUI = halui
# list of hal config files to run through halcmd
#+ files are executed in the order in which they appear
HALFILE = stepper.hal
HALFILE = torchud.hal
HALFILE = thc.hal
HALFILE = IO.hal
# A file to hook pyvcp to hal signals
POSTGUI_HALFILE = thc_vcp.halMy INI file
[HAL]
# required
TWOPASS = ON
# the base machine
HALFILE = plasma.hal
# the plasmac component connections
HALFILE = plasmac.tcl
# the plasmac machine connections
HALFILE = plasma_connections.hal
# THC following Tommylight's
HALFILE = torchud.hal
HALFILE = thc.hal
# use this for customisation after GUI has loaded
POSTGUI_HALFILE = postgui.hal
# required
HALUI = halui
Last edit: 31 Oct 2020 10:48 by radek_marko.
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
31 Oct 2020 11:09 - 31 Oct 2020 11:11 #187887
by phillc54
Replied by phillc54 on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
If you are using PlasmaC then you wouldn't use thcud.hal, you would just run the Configurator as per the user guide.
Edit: you wouldn't need thc.hal either.
Edit: you wouldn't need thc.hal either.
Last edit: 31 Oct 2020 11:11 by phillc54.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- radek_marko
- Offline
- Senior Member
-
Less
More
- Posts: 73
- Thank you received: 18
31 Oct 2020 11:59 #187892
by radek_marko
Replied by radek_marko on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
Hi Phill,
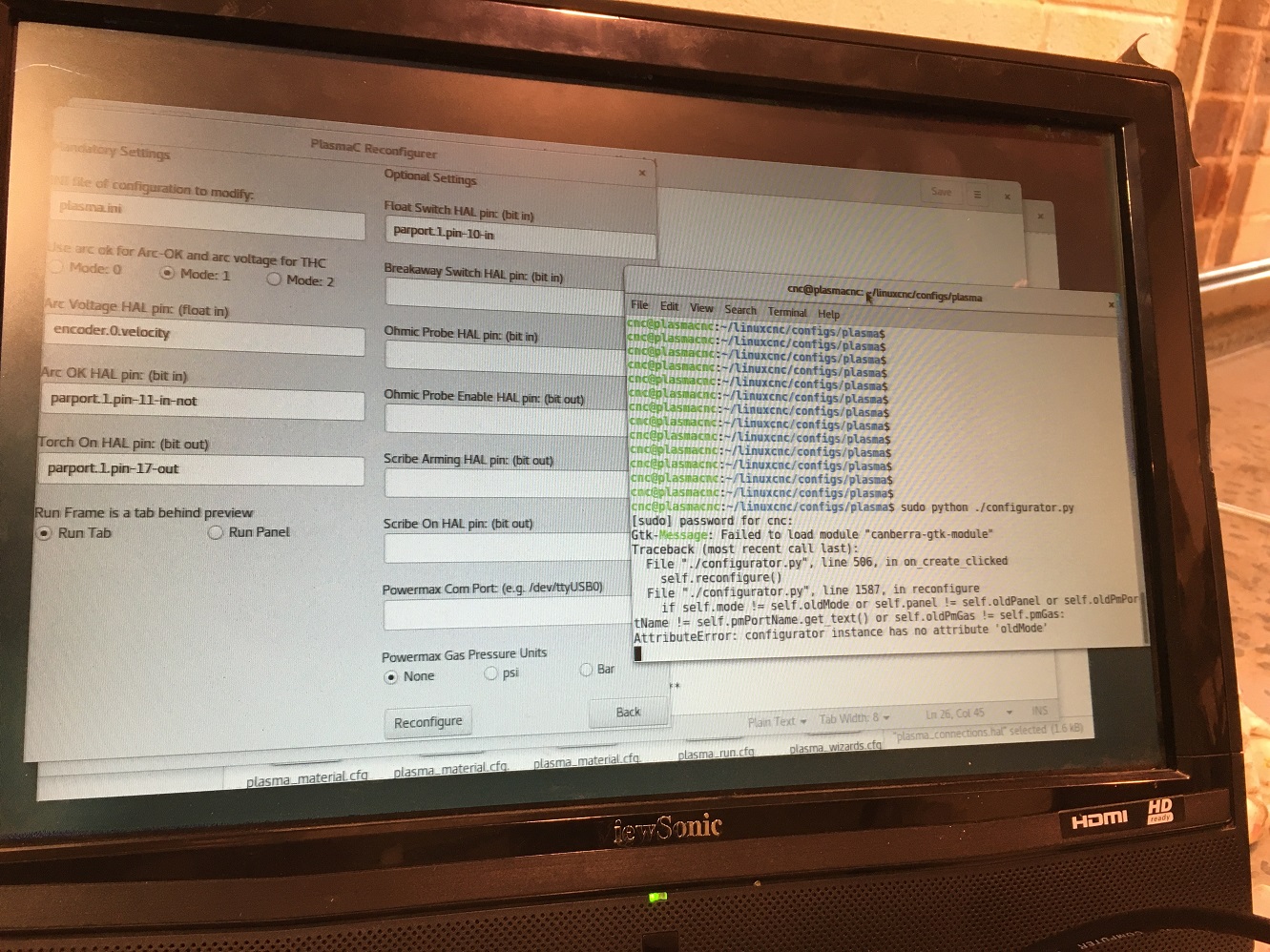
I have tried to run through configurator with RECONFIGURE option, but I'm getting an error as per photo attached.
Searching for a solution right now.
I have tried to run through configurator with RECONFIGURE option, but I'm getting an error as per photo attached.
Searching for a solution right now.
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21712
- Thank you received: 7418
31 Oct 2020 16:55 #187924
by tommylight
Replied by tommylight on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
No need for thc.hal and torchud.hal as Phill mentioned, and i was using a THCAD300 in that case so the math will differ.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
31 Oct 2020 22:57 #187953
by phillc54
Replied by phillc54 on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
What Linux distro are you using.
Try:
Try:
sudo apt install libcanberra-gtk-module
The following user(s) said Thank You: radek_marko
Please Log in or Create an account to join the conversation.
- radek_marko
- Offline
- Senior Member
-
Less
More
- Posts: 73
- Thank you received: 18
31 Oct 2020 23:37 - 31 Oct 2020 23:45 #187956
by radek_marko
Replied by radek_marko on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
Phill
I'm still in a bit of struggle. I have installed PlasmaC v0.169. I've selected mode to 1 and put encoder.0.velocity in ark voltage as per manual.
Now LinuxCNC complains about missing input called encoder.0.velocity...
I'm still in a bit of struggle. I have installed PlasmaC v0.169. I've selected mode to 1 and put encoder.0.velocity in ark voltage as per manual.
Now LinuxCNC complains about missing input called encoder.0.velocity...
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.8.0
Machine configuration directory is '/home/cnc/linuxcnc/configs/plasma'
Machine configuration file is 'plasma.ini'
INIFILE=/home/cnc/linuxcnc/configs/plasma/plasma.ini
VERSION=1.1
check_config: (trivkins kinematics) WARNING:
INCONSISTENT coordinates specifications:
trivkins coordinates=XYYZ
[TRAJ]COORDINATES=XYZ
PARAMETER_FILE=metric_parameters.txt
TASK=milltask
HALUI=halui
DISPLAY=axis
COORDINATES=X Y Z
KINEMATICS=trivkins coordinates=XYYZ kinstype=BOTH
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
Starting HAL User Interface program: halui
twopass:invoked with <> options
twopass:found ./plasma.hal
twopass:found ././plasmac/plasmac.tcl
twopass:found ./plasma_connections.hal
twopass: Error in file ./plasma_connections.hal:
Pin 'encoder.0.velocity' does not exist
Shutting down and cleaning up LinuxCNC...
config string '0 out 1 out'
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
980
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
-----------------------------------------------------------------------
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
http://pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Sat 31 Oct 23:44:35 GMT 2020
UTC Date: Sat 31 Oct 23:44:35 UTC 2020
this program: /usr/bin/linuxcnc_info
uptime: 23:44:35 up 6 min, 1 user, load average: 1.31, 0.85, 0.40
lsb_release -sa: Debian Debian GNU/Linux 10 (buster) 10 buster
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/cnc/linuxcnc/configs/plasma
USER: cnc
LOGNAME: cnc
HOME: /home/cnc
EDITOR:
VISUAL:
LANGUAGE: en_GB:en
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: lightdm-xsession
display size: 1920x1080 pixels (508x285 millimeters)
PATH: /usr/bin:/home/cnc/linuxcnc/configs/plasma/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: PlasmaCNC
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.19.146-1 (2020-09-17)
machine -m: x86_64
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/vmlinuz-4.19.0-11-rt-amd64 root=UUID=db97749c-79f6-49f7-9f7a-eebe59d40acc ro initrd=/install/gtk/initrd.gz quiet
model name: Intel(R) Core(TM)2 Quad CPU Q6600 @ 2.40GHz
cores: 4
cpu MHz: 1597.881
parport: 0000-0000 : parport0 0000-0000 : parport0 0000-0000 : parport1
serial:
Versions:
gcc: gcc (Debian 8.3.0-6) 8.3.0
python: Python 2.7.16
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.8.0
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Desired=Unknown/Install/Remove/Purge/Hold
| Status=Not/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend
|/ Err?=(none)/Reinst-required (Status,Err: uppercase=bad)
||/ Name Version Architecture Description
+++-===================-============-============-=====================================================================
un linuxcnc <none> <none> (no description available)
un linuxcnc-dev <none> <none> (no description available)
un linuxcnc-doc <none> <none> (no description available)
ii linuxcnc-doc-cn 1:2.8.0 all motion controller for CNC machines and robots (Chinese
ii linuxcnc-doc-en 1:2.8.0 all motion controller for CNC machines and robots (English documentation)
ii linuxcnc-doc-es 1:2.8.0 all controlador de movimiento para máquinas CNC y robots (Español).
ii linuxcnc-doc-fr 1:2.8.0 all motion controller for CNC machines and robots (French documentation)
un linuxcnc-sim <none> <none> (no description available)
un linuxcnc-sim-dev <none> <none> (no description available)
ii linuxcnc-uspace 1:2.8.0 amd64 motion controller for CNC machines and robots
ii linuxcnc-uspace-dev 1:2.8.0 amd64 PC based motion controller for real-time Linux
Last edit: 31 Oct 2020 23:45 by radek_marko.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21712
- Thank you received: 7418
31 Oct 2020 23:51 #187958
by tommylight
Replied by tommylight on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
Did you add the lines pertaining to encoder in the plasma.hal file ?
The following user(s) said Thank You: phillc54, radek_marko
Please Log in or Create an account to join the conversation.
- radek_marko
- Offline
- Senior Member
-
Less
More
- Posts: 73
- Thank you received: 18
01 Nov 2020 00:05 - 01 Nov 2020 14:23 #187959
by radek_marko
Replied by radek_marko on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
Tommylight - I didnt modify any part of it as I was expecting that configurator.py will take care of it.
I've added the following to plasma_connections.hal
and now LinuxCNC starts.
I have PC at home and will try to connect to CNC machine tomorrow and see if THCAD-10 will work.
Thx for all your support and help.
I've added the following to plasma_connections.hal
loadrt encoder num_chan=1
setp encoder.0.counter−mode 1
setp encoder.0.position−scale -1
addf encoder.update-counters base-thread
addf encoder.capture-position servo-thread
net arc-voltage-raw parport.1.pin-15-in encoder.0.phase-A
net plasmac:arc-voltage-in encoder.0.velocity => plasmac.arc-voltage-inand now LinuxCNC starts.
I have PC at home and will try to connect to CNC machine tomorrow and see if THCAD-10 will work.
Thx for all your support and help.
Last edit: 01 Nov 2020 14:23 by radek_marko.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21712
- Thank you received: 7418
01 Nov 2020 22:53 #188063
by tommylight
")
Replied by tommylight on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
and now LinuxCNC starts.
The following user(s) said Thank You: radek_marko
Please Log in or Create an account to join the conversation.
- radek_marko
- Offline
- Senior Member
-
Less
More
- Posts: 73
- Thank you received: 18
03 Nov 2020 09:23 #188197
by radek_marko
Replied by radek_marko on topic THC for Hypertherm 45XP based on DT-115 / LM393 comparator
I've updated Linux to Debian 10, updated PlasmaC to v0.169 and with all your help I've managed to get THC acting as expected.
Thank you again!
Thank you again!
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.337 seconds