Why won't it jog
- beefy
- Offline
- Elite Member
-

Less
More
- Posts: 227
- Thank you received: 58
09 Jul 2023 04:20 #275056
by beefy
Why won't it jog was created by beefy
Using a Qtplasmac config with a 7i96 board with hal file generated by PncConfig
I've hooked up a microcontroller programmed as an encoder emulator, to the 7i96 board.
All this encoder emulator board does is give out A & B quadrature signals at different frequencies (to give different jog speeds).
The only other extra signals I have are from a 3 way selector switch to select either X, Y or Z jog-enable.
The 7i96 is flashed with the 7i96_p1inmd.bit file which gives extra encoder reader inputs on the P1 expansion port.
Wrote a very basic custom hal file - no ilowpass, etc, just the bare bones for testing.
The code is:
net encoder-counts <= hm2_7i96.0.inm.00.enc0-count
net encoder-counts => axis.x.jog-counts joint.0.jog-counts
net encoder-counts => axis.y.jog-counts joint.1.jog-counts
net encoder-counts => axis.z.jog-counts joint.2.jog-counts
net jog-enable-X hm2_7i96.0.inm.00.input-02-not => axis.x.jog-enable joint.0.jog-enable
net jog-enable-Y hm2_7i96.0.inm.00.input-03-not => axis.y.jog-enable joint.1.jog-enable
net jog-enable-Z hm2_7i96.0.inm.00.input-04-not => axis.z.jog-enable joint.2.jog-enable
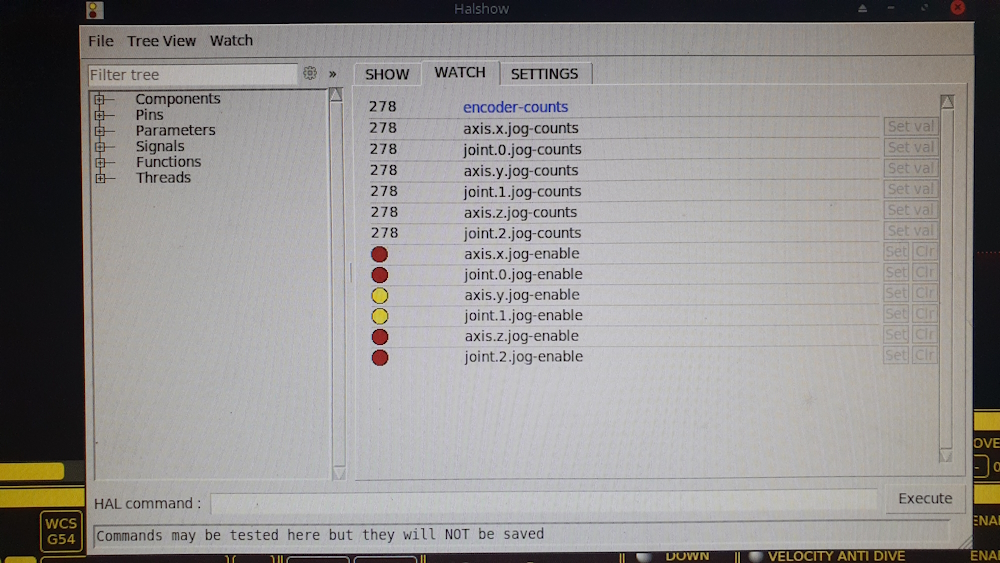
I used Halshow to see the encoder value increase and decrease with FWD and REV directions.
Likewise all jog count pins for X,Y,Z axis and 0,1,2 joints incremented / decremented together with the encoder count value, so all seems to work perfect there.
Likewise the X, Y, Z jog-enable and 0, 1, 2 joint jog-enable pins activate with the corresponding selector switch positions.
So I have one of the jog-enable signals active and the encoder counts working.
Why does the axis not respond, am I missing something in the hal file.
Qtplasmac config backup file attached.
I've hooked up a microcontroller programmed as an encoder emulator, to the 7i96 board.
All this encoder emulator board does is give out A & B quadrature signals at different frequencies (to give different jog speeds).
The only other extra signals I have are from a 3 way selector switch to select either X, Y or Z jog-enable.
The 7i96 is flashed with the 7i96_p1inmd.bit file which gives extra encoder reader inputs on the P1 expansion port.
Wrote a very basic custom hal file - no ilowpass, etc, just the bare bones for testing.
The code is:
net encoder-counts <= hm2_7i96.0.inm.00.enc0-count
net encoder-counts => axis.x.jog-counts joint.0.jog-counts
net encoder-counts => axis.y.jog-counts joint.1.jog-counts
net encoder-counts => axis.z.jog-counts joint.2.jog-counts
net jog-enable-X hm2_7i96.0.inm.00.input-02-not => axis.x.jog-enable joint.0.jog-enable
net jog-enable-Y hm2_7i96.0.inm.00.input-03-not => axis.y.jog-enable joint.1.jog-enable
net jog-enable-Z hm2_7i96.0.inm.00.input-04-not => axis.z.jog-enable joint.2.jog-enable
I used Halshow to see the encoder value increase and decrease with FWD and REV directions.
Likewise all jog count pins for X,Y,Z axis and 0,1,2 joints incremented / decremented together with the encoder count value, so all seems to work perfect there.
Likewise the X, Y, Z jog-enable and 0, 1, 2 joint jog-enable pins activate with the corresponding selector switch positions.
So I have one of the jog-enable signals active and the encoder counts working.
Why does the axis not respond, am I missing something in the hal file.
Qtplasmac config backup file attached.
Attachments:
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
09 Jul 2023 04:30 #275058
by phillc54
Replied by phillc54 on topic Why won't it jog
Are axis.N.jog-scale and joint.N.jog-scale being set to the correct value?
Please Log in or Create an account to join the conversation.
- beefy
- Offline
- Elite Member
-
Less
More
- Posts: 227
- Thank you received: 58
09 Jul 2023 04:44 - 09 Jul 2023 04:48 #275059
by beefy
Replied by beefy on topic Why won't it jog
That's interesting Phill.
Are you saying I MUST include them in the hal file and give them a value ?? i.e. jog-scale does not default to a value if it's not in the hal file.
Saying that I just looked in the docs and there's no mention of any default.
Are you saying I MUST include them in the hal file and give them a value ?? i.e. jog-scale does not default to a value if it's not in the hal file.
Saying that I just looked in the docs and there's no mention of any default.
Last edit: 09 Jul 2023 04:48 by beefy.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
09 Jul 2023 04:47 #275060
by phillc54
Replied by phillc54 on topic Why won't it jog
Yes, that is the distance moved each count.
The axes ones are in the hal file but I am not sure what it is that they are connected to.
The axes ones are in the hal file but I am not sure what it is that they are connected to.
Please Log in or Create an account to join the conversation.
- beefy
- Offline
- Elite Member
-
Less
More
- Posts: 227
- Thank you received: 58
09 Jul 2023 04:50 - 09 Jul 2023 04:58 #275061
by beefy
Replied by beefy on topic Why won't it jog
OK that's an easy thing to try.
Cheers Phill.
EDIT:
Well what do you know, I'm a dick. I actually looked back in my comments for the C coding in the microcontroller and there's me mentioning about setting a scale of 0.1 for the jog speed calculations (based on quadrature pulse rates), yet I forget all about that LOL.
Cheers Phill.
EDIT:
Well what do you know, I'm a dick. I actually looked back in my comments for the C coding in the microcontroller and there's me mentioning about setting a scale of 0.1 for the jog speed calculations (based on quadrature pulse rates), yet I forget all about that LOL.
Last edit: 09 Jul 2023 04:58 by beefy.
Please Log in or Create an account to join the conversation.
- beefy
- Offline
- Elite Member
-
Less
More
- Posts: 227
- Thank you received: 58
09 Jul 2023 05:41 - 09 Jul 2023 05:42 #275062
by beefy
Replied by beefy on topic Why won't it jog
Phill, I love you.
Couldn't find any jog-scale stuff in the hal files but I just stuck the following in my custom hal file regardless:
net jog-scale axis.x.jog-scale joint.0.jog-scale
net jog-scale axis.y.jog-scale joint.1.jog-scale
net jog-scale axis.z.jog-scale joint.2.jog-scale
sets jog-scale 0.1
and voila, everything worked perfectly. All axis, all jog speed settings, exactly as I'd programmed the microcontroller to do it. I'm over the moon.
Thanks Phill.
Couldn't find any jog-scale stuff in the hal files but I just stuck the following in my custom hal file regardless:
net jog-scale axis.x.jog-scale joint.0.jog-scale
net jog-scale axis.y.jog-scale joint.1.jog-scale
net jog-scale axis.z.jog-scale joint.2.jog-scale
sets jog-scale 0.1
and voila, everything worked perfectly. All axis, all jog speed settings, exactly as I'd programmed the microcontroller to do it. I'm over the moon.
Thanks Phill.
Last edit: 09 Jul 2023 05:42 by beefy.
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.153 seconds