- Configuring LinuxCNC
- Advanced Configuration
- New compensation component for engraving and 3D Printing
New compensation component for engraving and 3D Printing
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 959
- Thank you received: 489
09 May 2020 21:41 - 09 May 2020 23:31 #167181
by scotta
New compensation component for engraving and 3D Printing was created by scotta
I've been using LinuxCNC with a RPi for 3D Printing for some years now. Along the way slowly developing functionality needed for a 3D printer. Bed levelling, I hope, is the last piece of the puzzle besides an integrated GUI.
I have found several approaches from over the years:
My first efforts were similar to the Probekins approach, but to use linear regression to map a quadratic surface to the surface probe data points and to use this within the kinematics to perform the correction. I had this working nicely but with one major drawback. As it is a surface of best fit there is errors at the probe points. Sometimes these errors defeat the purpose.
In another recent thread Andy Pugh made the suggestion:
"If I was doing this with current LinuxCNC I think I would still use the STL offset map, but would use a standalone HAL component that output a Z correction fir use by the external offsets inputs. "
Which got me back to the drawing board, and I'm happy to say that with the help of Covid-19 isolation I can share a Beta version of my compensation component that uses external offsets as he suggested, but uses interpolation to create a correction map.
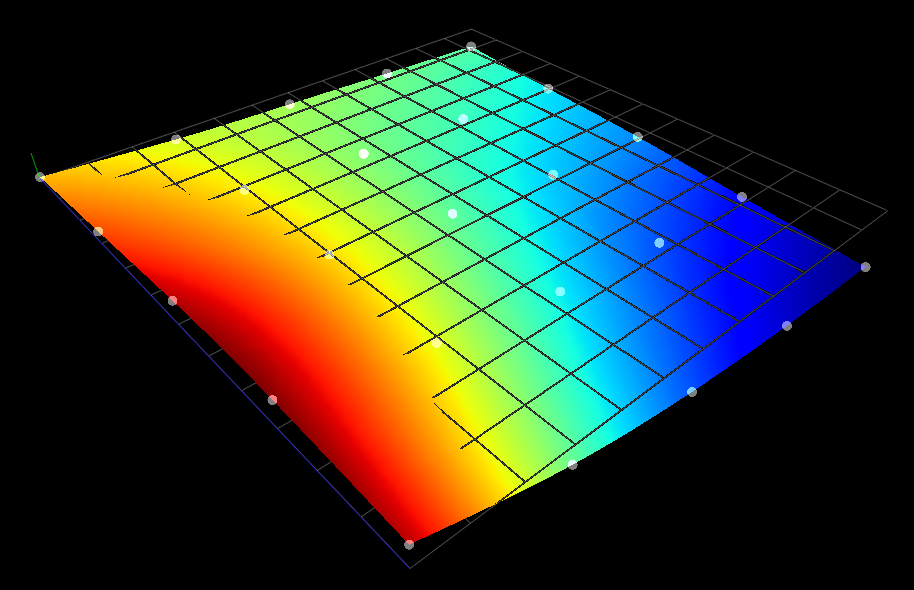
I had added my compensation component to my GitHub and a short YouTube video of it in action. Some testers and feedback would be appreciated. The video shows this correction map in the picture above being applied.
Regards
Scott
I have found several approaches from over the years:
- Correcting the G Code source
- Mapping an STL triangulated surface and interpolating within the Kinematics - Probekins
- A usr space Python component performing bilinear interpolation and intercepting the motor position commands - CNC-CLUB.ru
My first efforts were similar to the Probekins approach, but to use linear regression to map a quadratic surface to the surface probe data points and to use this within the kinematics to perform the correction. I had this working nicely but with one major drawback. As it is a surface of best fit there is errors at the probe points. Sometimes these errors defeat the purpose.
In another recent thread Andy Pugh made the suggestion:
"If I was doing this with current LinuxCNC I think I would still use the STL offset map, but would use a standalone HAL component that output a Z correction fir use by the external offsets inputs. "
Which got me back to the drawing board, and I'm happy to say that with the help of Covid-19 isolation I can share a Beta version of my compensation component that uses external offsets as he suggested, but uses interpolation to create a correction map.
I had added my compensation component to my GitHub and a short YouTube video of it in action. Some testers and feedback would be appreciated. The video shows this correction map in the picture above being applied.
Regards
Scott
Last edit: 09 May 2020 23:31 by scotta.
The following user(s) said Thank You: tommylight, alkabal, Aciera, bbsr_5a, itsme, rajsekhar, hmnijp
Please Log in or Create an account to join the conversation.
- bbsr_5a
- Offline
- Platinum Member
-
Less
More
- Posts: 544
- Thank you received: 106
11 May 2020 06:53 #167333
by bbsr_5a
Replied by bbsr_5a on topic New compensation component for engraving and 3D Printing
Question does your component also reads standard printer G-code like Marvel and translate the mcodes and E-Axis towards linux used
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
Less
More
- Posts: 476
- Thank you received: 52
12 May 2020 03:18 #167454
by alkabal
Replied by alkabal on topic New compensation component for engraving and 3D Printing
Hi
This is really interesting for, i plan to use Linuxcnc later for 3D printer, so thanks a lot for this component.
For make things simpler i like to use external standalone temperature controler, i have start experimenting this type of controler with a smoothieboard on my little cnc, so unfortunatly i can't test your component (for now i only have a lathe working on Lcnc) but you can be sure one day or other i come back here !
But i have already some questions if you agree :
Did you use a Bltouch for probing ?
Did you plan to share also something for create the map ?
Br
This is really interesting for, i plan to use Linuxcnc later for 3D printer, so thanks a lot for this component.
For make things simpler i like to use external standalone temperature controler, i have start experimenting this type of controler with a smoothieboard on my little cnc, so unfortunatly i can't test your component (for now i only have a lathe working on Lcnc) but you can be sure one day or other i come back here !
But i have already some questions if you agree :
Did you use a Bltouch for probing ?
Did you plan to share also something for create the map ?
Br
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
21 May 2020 21:10 #168535
by scotta
Replied by scotta on topic New compensation component for engraving and 3D Printing
Component does not care about the flavour of the G Code. BTW Prusa Slicer can output LinuxCNC/Mach3 compliant code very nicely.
The Extruder becomes the A axis then.
BR
Scott
The Extruder becomes the A axis then.
BR
Scott
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
21 May 2020 21:19 #168538
by scotta
Replied by scotta on topic New compensation component for engraving and 3D Printing
Hi,
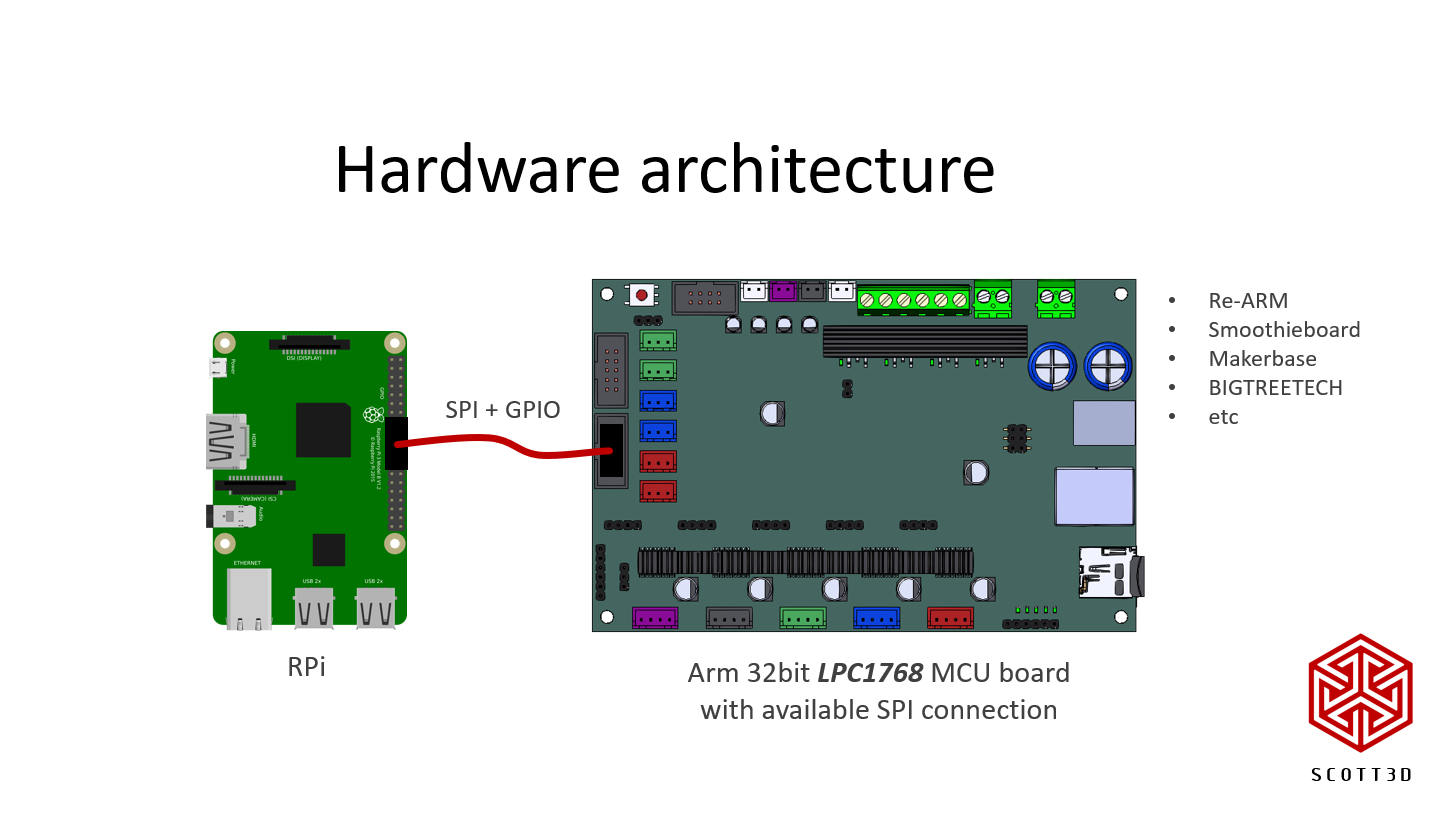
I really need to publish my new firmware for Smoothieboard clones, LPC1768 based boards. LinuxCNC running on a RPi talking directly to the PRU (the LPC1768 based board - Smoothieboard, Bigtreetech SKR etc) over the SPI interface, which handles real-time step generation, IO and heater control. Full closed loop functionality is also working.
Gives all the functionality needed for a CNC machine (engraver, router, printer) using readily available and mass produced (cheap) hardware.
I'm using a poor mans BLTouch as I have not had a great result with the cheaper versions of the BLTouch.
I'll share the subroutines for map generation over the weekend.
BR
Scott
I really need to publish my new firmware for Smoothieboard clones, LPC1768 based boards. LinuxCNC running on a RPi talking directly to the PRU (the LPC1768 based board - Smoothieboard, Bigtreetech SKR etc) over the SPI interface, which handles real-time step generation, IO and heater control. Full closed loop functionality is also working.
Gives all the functionality needed for a CNC machine (engraver, router, printer) using readily available and mass produced (cheap) hardware.
I'm using a poor mans BLTouch as I have not had a great result with the cheaper versions of the BLTouch.
I'll share the subroutines for map generation over the weekend.
BR
Scott
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
Less
More
- Posts: 476
- Thank you received: 52
21 May 2020 21:30 #168543
by alkabal
Replied by alkabal on topic New compensation component for engraving and 3D Printing
Well I'm not sure i understand : Did you mean you have write some firmware for use a smoothieboard with linuxcnc ??? If this is that i'm really interested because these card software are not really great and from long time i have some regret to not use linuxcnc for my first retrofit...
I ask for Bltouch mostly for know how it is wired and configured with Lcnc ?
Closed loop with smoothieboard or equivalent ???
Br
I ask for Bltouch mostly for know how it is wired and configured with Lcnc ?
Closed loop with smoothieboard or equivalent ???
Br
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
22 May 2020 23:48 #168614
by scotta
Replied by scotta on topic New compensation component for engraving and 3D Printing
Yes, correct. A new firmware that allows a smoothieboard (or clone) to be used with LinuxCNC!
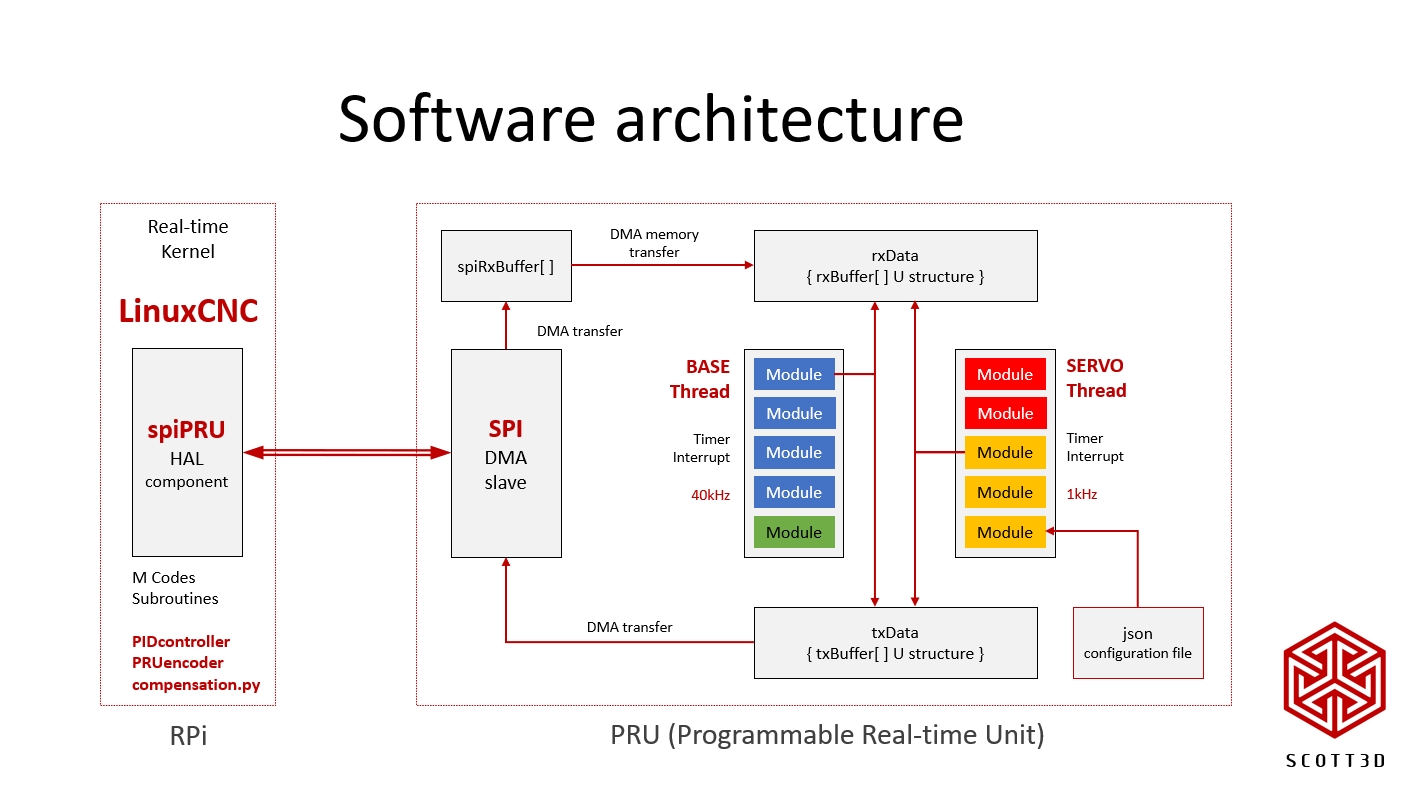
BLTouch is wired to the control board (PRU) and the IO and PWM (servo position) commands are sent over the SPI interface. Custom M Codes in LinuxCNC as well.
For closed loop control there is an Encoder module which gives position feedback to LinuxCNC.
BR
Scott
BLTouch is wired to the control board (PRU) and the IO and PWM (servo position) commands are sent over the SPI interface. Custom M Codes in LinuxCNC as well.
For closed loop control there is an Encoder module which gives position feedback to LinuxCNC.
BR
Scott
The following user(s) said Thank You: Mike_Eitel, tommylight
Please Log in or Create an account to join the conversation.
- alkabal
- Offline
- Platinum Member
-
Less
More
- Posts: 476
- Thank you received: 52
23 May 2020 00:10 #168617
by alkabal
Replied by alkabal on topic New compensation component for engraving and 3D Printing
Awesome this is something like a dream !!!
I have too many issue with smoothieware/smoopi...
I think this possible to use some long wire like 1 meter for spi so this is really perfect !
I have too many issue with smoothieware/smoopi...
I think this possible to use some long wire like 1 meter for spi so this is really perfect !
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
23 May 2020 02:57 #168639
by scotta
Replied by scotta on topic New compensation component for engraving and 3D Printing
Unfortunately the SPI cable needs to be as short as possible to ensure reliable communication. Current HAL real-time component runs the SPI at 6.25MHz. A slower frequency could be used but then you would need to run the LinuxCNC servo thread at a slower rate.
Please Log in or Create an account to join the conversation.
- Mike_Eitel
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1052
- Thank you received: 183
23 May 2020 11:39 #168682
by Mike_Eitel
Replied by Mike_Eitel on topic New compensation component for engraving and 3D Printing
Is your code:
a. compiled with vsc
b. only running 1768
c. possible to run TMC2209
Anyhow a very interesting aproach for small machines.
Mike
a. compiled with vsc
b. only running 1768
c. possible to run TMC2209
Anyhow a very interesting aproach for small machines.
Mike
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- New compensation component for engraving and 3D Printing
Time to create page: 0.213 seconds