Setting Servo Max Acceleration
- Michael
- Offline
- Platinum Member
-

Less
More
- Posts: 335
- Thank you received: 59
15 Jan 2021 01:14 #195387
by Michael
Setting Servo Max Acceleration was created by Michael
Playing around today with tuning my servos and made great progress once I turned the acceleration setting down significantly. With high settings I was seeing an Ferror spike at the beginning and end that could not be controlled with any PID setting. The servos are capable of "near instantaneous acceleration" and the manual has an equation for the allowable acceleration but the reality is that friction and weight resistance won't allow that.
Is there a way to use Halscope or something to help figure out the Max Acceleration setting for servos in velocity mode? Also is there a way to make changes to the ini file while LCNC is running? So far messing with acceleration settings is done by closing LCNC, adjust ini, reopen LCNC, halscope, calibration, etc.
Thanks in advance
Is there a way to use Halscope or something to help figure out the Max Acceleration setting for servos in velocity mode? Also is there a way to make changes to the ini file while LCNC is running? So far messing with acceleration settings is done by closing LCNC, adjust ini, reopen LCNC, halscope, calibration, etc.
Thanks in advance
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5283
15 Jan 2021 04:11 - 15 Jan 2021 04:12 #195398
by PCW
Replied by PCW on topic Setting Servo Max Acceleration
You can change ini values on the fly (not during motion but when paused)
by changing the ini.xxx pins with halcmd.
(in a terminal windows with linuxCNC running)
for example
halcmd -fk
--To list available pins:
halcmd: show pin ini*
--and then to tweak values:
halcmd setp ini.y.max_acceleration 400
-- for example
by changing the ini.xxx pins with halcmd.
(in a terminal windows with linuxCNC running)
for example
halcmd -fk
--To list available pins:
halcmd: show pin ini*
--and then to tweak values:
halcmd setp ini.y.max_acceleration 400
-- for example
Last edit: 15 Jan 2021 04:12 by PCW.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
15 Jan 2021 04:40 #195399
by Todd Zuercher
Replied by Todd Zuercher on topic Setting Servo Max Acceleration
As to calculating the max acceleration. You can plot the velocity feedback in Halscope when the acceleration is set too high, the slope of that will be the physical max. But you will want to program the max acceleration limit in the ini file to something less to give the PID headroom to work. Something like 10% less is a good start.
The following user(s) said Thank You: anfänger
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
15 Jan 2021 13:12 #195429
by andypugh
Replied by andypugh on topic Setting Servo Max Acceleration
If the machine moves the workpiece, then check at max workpiece mass too
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
15 Jan 2021 14:28 #195431
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
Supposed to be a max load of ~750 pounds on the table. Probably never get close to that. Ran some ideas through my head of either buying 9 bags of 80 pound concrete (return them when I am done) or find a way to hold 90 gallons of water on the table which would be 12 cu ft. Water could get messy and that's a lot of water.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
15 Jan 2021 14:35 #195432
by andypugh
Replied by andypugh on topic Setting Servo Max Acceleration
Find a number of gullible drunks.
The following user(s) said Thank You: tommylight, ikkuh, anfänger
Please Log in or Create an account to join the conversation.
- anfänger
-
- Offline
- Platinum Member
-
Less
More
- Posts: 627
- Thank you received: 256
15 Jan 2021 15:05 #195436
by anfänger
Replied by anfänger on topic Setting Servo Max Acceleration
ISO water container can store 1to of water....
But how big is your table? Go to the next blacksmith and as if his big anvils need resurfacing...
But how big is your table? Go to the next blacksmith and as if his big anvils need resurfacing...
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
15 Jan 2021 16:26 #195454
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
Haha all good suggestions. Table is 52Lx17Wx16H to clear the tool changer. I would need to find some squat guliable drunkards. Bags of concrete are cheap will just have to get it close.
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
19 Jan 2021 23:37 #195940
by Michael
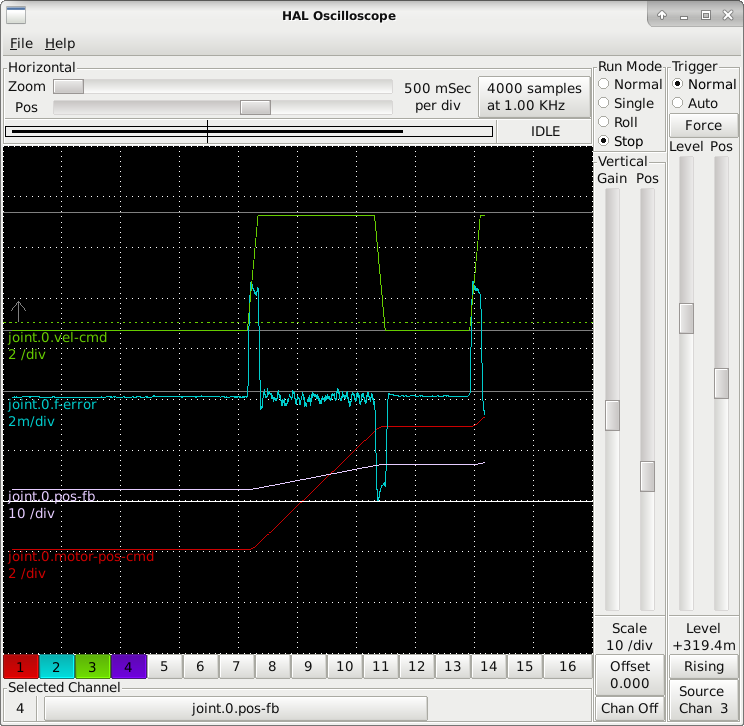
I am back at playing with this but not sure I understand this point. I am looking at vel-cmd and f-error and poss-fb in halscope. Not sure if this is what you are referring to with "velocity feedback". Vel-cmd is a pretty straight up and down plateau with f-error in between the plateau. The rest are just slopes that aren't much good. The f-error start and stop still have a big spike that isn't much affected by FF2.
Any further advice would be appreciated.
Replied by Michael on topic Setting Servo Max Acceleration
As to calculating the max acceleration. You can plot the velocity feedback in Halscope when the acceleration is set too high, the slope of that will be the physical max. But you will want to program the max acceleration limit in the ini file to something less to give the PID headroom to work. Something like 10% less is a good start.
I am back at playing with this but not sure I understand this point. I am looking at vel-cmd and f-error and poss-fb in halscope. Not sure if this is what you are referring to with "velocity feedback". Vel-cmd is a pretty straight up and down plateau with f-error in between the plateau. The rest are just slopes that aren't much good. The f-error start and stop still have a big spike that isn't much affected by FF2.
Any further advice would be appreciated.
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
19 Jan 2021 23:45 #195945
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
Turned Max Acceleration to 50 and got this at 270IPM no FF2 yet
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.312 seconds