Setting Servo Max Acceleration
- Michael
- Offline
- Platinum Member
-

Less
More
- Posts: 335
- Thank you received: 59
20 Jan 2021 00:17 #195951
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
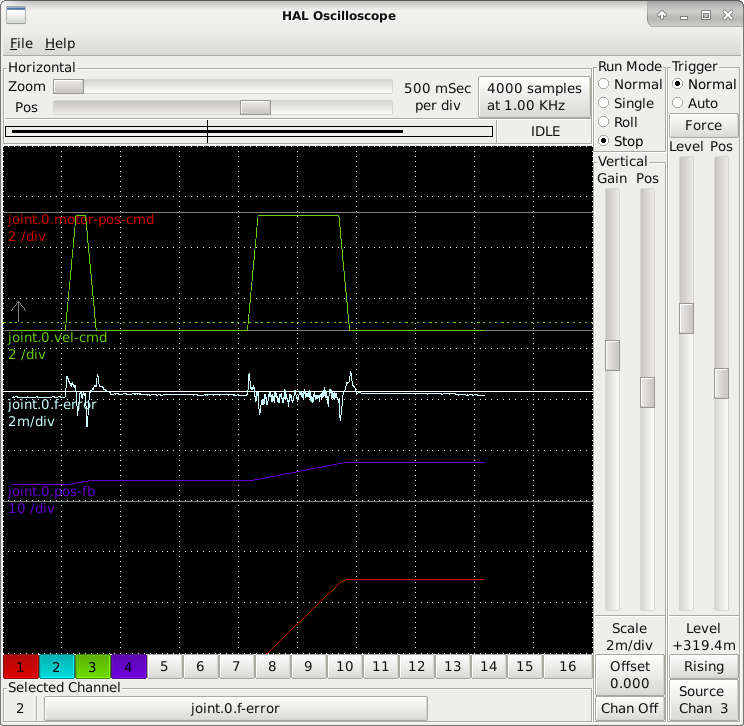
P80
FF1=1.01785
FF2=.0062
at 270 IPM about half max speed
Any ideas to get rid of the over under shoot at the beginning and the end?
FF1=1.01785
FF2=.0062
at 270 IPM about half max speed
Any ideas to get rid of the over under shoot at the beginning and the end?
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21764
- Thank you received: 7438
20 Jan 2021 00:20 #195953
by tommylight
Replied by tommylight on topic Setting Servo Max Acceleration
Try adding just a bit of I, see if that lowers the spikes, if FF2 does not help, it should.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
20 Jan 2021 00:33 - 20 Jan 2021 00:36 #195958
by PCW
Replied by PCW on topic Setting Servo Max Acceleration
You should be able to reduce the error with FF2
You have too low FF2 (error same direction as acceleration)
Too much FF2 will cause an error in the opposite direction
of acceleration
Edit nevermind, didn't see your last post
You have too low FF2 (error same direction as acceleration)
Too much FF2 will cause an error in the opposite direction
of acceleration
Edit nevermind, didn't see your last post
Last edit: 20 Jan 2021 00:36 by PCW.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
20 Jan 2021 00:42 #195960
by tommylight
")
Replied by tommylight on topic Setting Servo Max Acceleration
Me neither, till i read this !Edit nevermind, didn't see your last post
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
20 Jan 2021 00:56 #195963
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
So based off the last picture I am decent with FF2 and start tweaking I?
What's a typical I range?
What's a typical I range?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
20 Jan 2021 01:26 #195965
by PCW
Replied by PCW on topic Setting Servo Max Acceleration
FF2 looks close, It may be about as good as you can get.
Is P as high as you can get and still remain stable?
Also as tommylight says, some I term may help since the deviations
are relatively low frequency (make sure you have reasonable
following error limits as oscillations from too much I are
of large magnitude)
Is P as high as you can get and still remain stable?
Also as tommylight says, some I term may help since the deviations
are relatively low frequency (make sure you have reasonable
following error limits as oscillations from too much I are
of large magnitude)
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
20 Jan 2021 13:39 #195990
by Todd Zuercher
Replied by Todd Zuercher on topic Setting Servo Max Acceleration
Don't loose perspective looking at the scope either. What sort of machine is this? Is the scale in mm or inches? The following error peaks are only about 0.0013 or so in the above screen shot. (Pretty good if it is in mm.) How good is good enough?
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
20 Jan 2021 16:53 #196006
by Michael
Replied by Michael on topic Setting Servo Max Acceleration
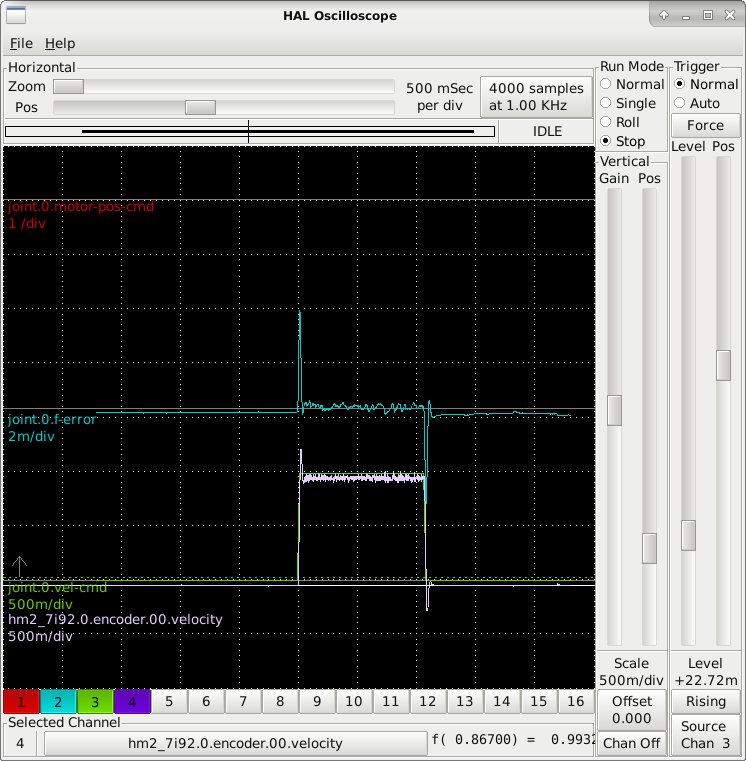
That is good to know its close, part of this is learning the servo system. This machine is a refurbished VMC and we are in inches. This is my first servo system so I would like to get the dumb questions out of the way now since I have some smaller purpose built machines I would like to make that will have their own set of dumb questions. When adjusting the gain on the scope pins 5m/div is 5millionths? 2m/div is 2millions?
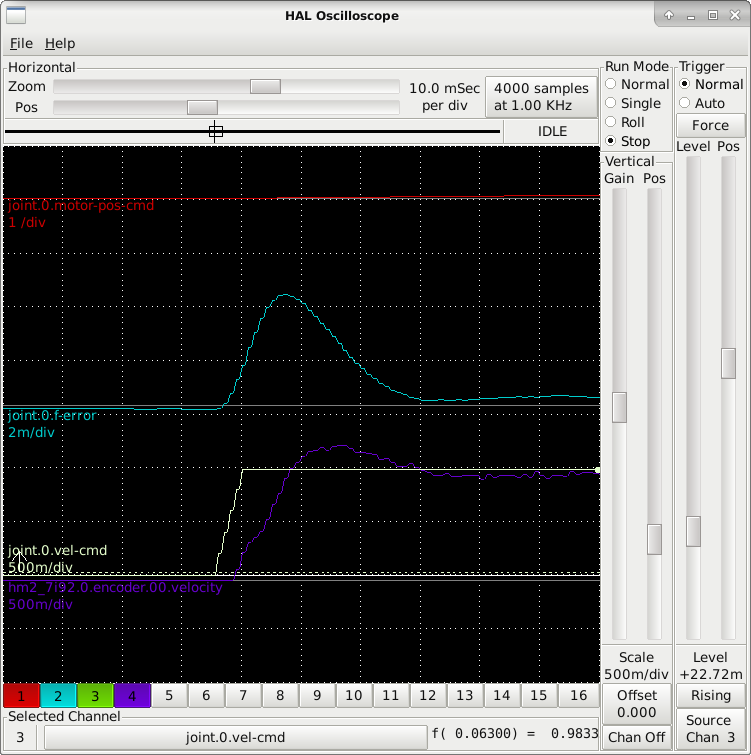
Going back on the max accelertion question, I was able to plot what I think is useful information for determining this setting. I used the vel-cmd and hm2_7i92.0.encoder.00.velocity pin to examine the slopes of the commanded acceleration and the feed back of that. I think what I am looking for is the feedback and the command to be narrowing towards the top of the plateau, signalling that the system is accelerating towards the commanded goal.
Here is example one with acceleration at 200 in/s2
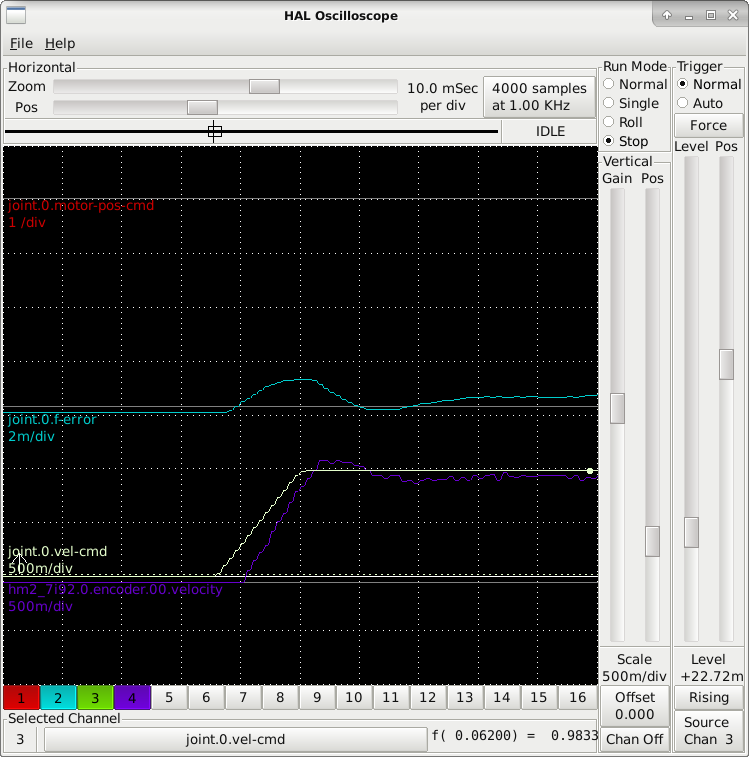
Example 2 with acceleration at 20 in/s2:
Going back on the max accelertion question, I was able to plot what I think is useful information for determining this setting. I used the vel-cmd and hm2_7i92.0.encoder.00.velocity pin to examine the slopes of the commanded acceleration and the feed back of that. I think what I am looking for is the feedback and the command to be narrowing towards the top of the plateau, signalling that the system is accelerating towards the commanded goal.
Here is example one with acceleration at 200 in/s2
Example 2 with acceleration at 20 in/s2:
Attachments:
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
Less
More
- Posts: 335
- Thank you received: 59
20 Jan 2021 17:04 #196007
by Michael
Define stable. I have P adjusted to where I get a small spike and not much oscillation on the scope after the initial jog. It can be turned up a lot higher and not get visible table instability. Should I be worried about instability on the scope or the table oscillating back and forth after a jog?
Turned off FF2 and set P at 300
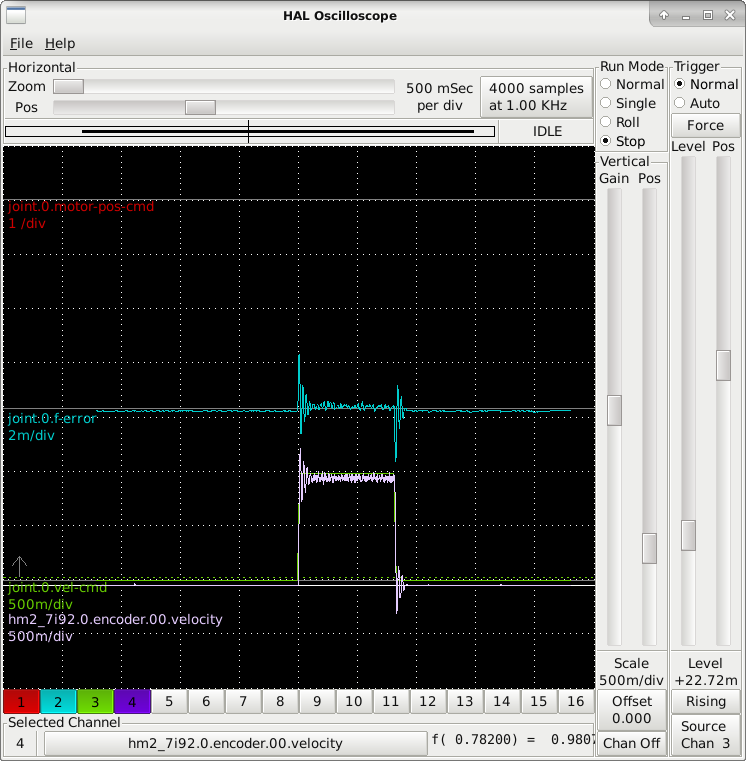
P at 100
Replied by Michael on topic Setting Servo Max Acceleration
FF2 looks close, It may be about as good as you can get.
Is P as high as you can get and still remain stable?
Also as tommylight says, some I term may help since the deviations
are relatively low frequency (make sure you have reasonable
following error limits as oscillations from too much I are
of large magnitude)
Define stable. I have P adjusted to where I get a small spike and not much oscillation on the scope after the initial jog. It can be turned up a lot higher and not get visible table instability. Should I be worried about instability on the scope or the table oscillating back and forth after a jog?
Turned off FF2 and set P at 300
P at 100
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
21 Jan 2021 01:59 #196048
by PCW
Replied by PCW on topic Setting Servo Max Acceleration
Instability would be continuous (and loud) oscillation.
It looks like P=300 is close to instability based on how long it "rings"
It looks like P=300 is close to instability based on how long it "rings"
Please Log in or Create an account to join the conversation.
Time to create page: 0.228 seconds