Retrofitting a 1986 Maho MH400E
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19876
- Thank you received: 4642
06 Nov 2017 18:45 #101450
by andypugh
You _could_ add a relay to bypass the e-stop and powered by logic around the axis.N.is-homing HAL pins.
Whether you _should_ is for you to decide")
Replied by andypugh on topic Retrofitting a 1986 Maho MH400E
The problem is that the limit snitches are hard wired to the estop circuit, so when they activate, they power off everything.n
You _could_ add a relay to bypass the e-stop and powered by logic around the axis.N.is-homing HAL pins.
Whether you _should_ is for you to decide
Please Log in or Create an account to join the conversation.
- RotarySMP
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1633
- Thank you received: 595
06 Nov 2017 18:55 #101451
by RotarySMP
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Thanks for the heads up on that 7i84 experimental firmware, but sInce it is an easy task to just move the wiring from terminal 200 to 204, I will do that. I am still a real newbie with the MESA and HAL set up, so I'd rather not pursue too many alternative options.
Mark
Mark
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1633
- Thank you received: 595
06 Nov 2017 18:57 #101452
by RotarySMP
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Johns machine already ate a ballscrew with it's previous owner because of a limit overrun crash. I don't see him jumpering that E-Stop system for homing
Mark
Mark
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19876
- Thank you received: 4642
06 Nov 2017 19:25 #101454
by andypugh
Replied by andypugh on topic Retrofitting a 1986 Maho MH400E
If adding a separate home sensor the ideal target for the prox is half the length of the travel, so that the home is in mid-travel and the prox state when homing commences sets the direction.
(ie, if the homing switch is set when the button is pressed then the machine switches "search" and goes to "back-off" immediately)
(ie, if the homing switch is set when the button is pressed then the machine switches "search" and goes to "back-off" immediately)
Please Log in or Create an account to join the conversation.
- drimaropoylos
- Offline
- Elite Member
-

Less
More
- Posts: 265
- Thank you received: 40
06 Nov 2017 20:54 - 06 Nov 2017 21:04 #101464
by drimaropoylos
Replied by drimaropoylos on topic Retrofitting a 1986 Maho MH400E
So the sensor must outputs 1 for half the travel and 0 for the rest half, so searching direction is depending on the state of the sensor. Clean, clever and safe, thank you for that solution. Putting a relay on the estop circuit to disable the limits during the homing and rout the NO contacts of the switches (if there is any) to mesa is one solution but not the safest one. The previous owner of the machine had rerouted the limit switches to mesa card, and during the testing as Mark said he crashed the machine.
John
John
Last edit: 06 Nov 2017 21:04 by drimaropoylos.
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1633
- Thank you received: 595
08 Nov 2017 18:27 - 08 Nov 2017 21:10 #101528
by RotarySMP
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Darn, I've run out of 0.14mm² ferrules, so I wont be able to permanently wire up the ribbon cable signals from the Maho 28A1 relay boards I/O to the 7i84 yet.
I am trying to get my head around the HAL. I was going to ask for help about three hours ago, but the process of writing the question, clarified it for me. Sort of...
I am trying to get the Maho to latch on under LinuxCNC control.
I have a physical 2 pole "MACHINE START" momentary switch, with one pole (NO) to close the physical E-Stop chain, which won't latch until the NC-Ready signal from the linux CNC closes the 19K1 latching relay.
With the E-Stop circuit temporarily closed, I thought that I could pick up an E-Stop.Ext signal from the MAHO relay boards output.

So I finally cut a MAHO cable. Chopped ribbon cable, no going back now. Wired it up, added the net, looked at it in the HALshow. Nothing. Checked the ribbon cable. Oops, I'd wired up the 5th strand, instead of the 4th. Tried again, still no signal. Came up to write this, pasted the wiring diagram, noticed, oops again, I'd wired up 28X1-4 (MAHO input ribbon cable) instead of 28X2-4 (MAHO output ribbon cable). I'll try that again.
....
net estop-ext <= hm2_5i25.0.7i84.0.2.input-17
Okay that works. Pushing the start switch closes the physical E-stop chain, LinuxCNC detects that and releases the E-Stop button at the top of the screen.
Now to latch it. That second pole of my start switch, which is (NC) and will need inverting, gets fed into LinuxCNC to pin hm2_5i25.0.7i77.0.0.input-04-not
Tested in HALshow okay.
This button will physically be my top RH softkey.

net gmoccapy.v-button-0 <= hm2_5i25.0.7i77.0.0.input-04-not
Question - Shouldn't this be in the postgui.hal?
What I didn't realise is that gmoccapy.v-button-0 is a predefined pin. My net above creates a second gmoccapy.v-button-0 as a signal, which follows the input, but is of course not connected to the gmoccapy functionality. What is wrong with my syntax there? Can you even net pins directly to pins? So far LinuxCNC is detecting the change in E-Etop state, but not yet reacting to the direct machine start command.
In the PNCconf generated HAL you have the line:
net machine-is-on halui.machine.is-on
so I wanted to use that to command the latching relay.
net machine-is-on => hm2_5i25.0.7i84.0.2.output-08
this is putting the tail before the dog, as this signal wont go true until after the LinuxCNC button second from top is pushed. I was going to use that LinuxCNC machine start button for drive enable on the Indramat, but I guess it can do both. Unless there a HAL signal like "LinuxCNC is ready for the machine to be turned on", then to start you'll need to hold down both the physical start switch and the second soft key " machine start", as that does trigger the machine-is-on signal. I tried it the double button push, but it didn't latch. I'll take a break and see what wiring screw up I made on that signal.
Question - is there a "LinuxCNC is ready for the machine to be turned on" signal available?
I guess a two button push start is true to the machines Phillips 432 DNA.
Mark
Mark
I am trying to get my head around the HAL. I was going to ask for help about three hours ago, but the process of writing the question, clarified it for me. Sort of...
I am trying to get the Maho to latch on under LinuxCNC control.
I have a physical 2 pole "MACHINE START" momentary switch, with one pole (NO) to close the physical E-Stop chain, which won't latch until the NC-Ready signal from the linux CNC closes the 19K1 latching relay.
With the E-Stop circuit temporarily closed, I thought that I could pick up an E-Stop.Ext signal from the MAHO relay boards output.
So I finally cut a MAHO cable. Chopped ribbon cable, no going back now. Wired it up, added the net, looked at it in the HALshow. Nothing. Checked the ribbon cable. Oops, I'd wired up the 5th strand, instead of the 4th. Tried again, still no signal. Came up to write this, pasted the wiring diagram, noticed, oops again, I'd wired up 28X1-4 (MAHO input ribbon cable) instead of 28X2-4 (MAHO output ribbon cable). I'll try that again.
....
net estop-ext <= hm2_5i25.0.7i84.0.2.input-17
Okay that works. Pushing the start switch closes the physical E-stop chain, LinuxCNC detects that and releases the E-Stop button at the top of the screen.
Now to latch it. That second pole of my start switch, which is (NC) and will need inverting, gets fed into LinuxCNC to pin hm2_5i25.0.7i77.0.0.input-04-not
Tested in HALshow okay.
This button will physically be my top RH softkey.
net gmoccapy.v-button-0 <= hm2_5i25.0.7i77.0.0.input-04-not
Question - Shouldn't this be in the postgui.hal?
What I didn't realise is that gmoccapy.v-button-0 is a predefined pin. My net above creates a second gmoccapy.v-button-0 as a signal, which follows the input, but is of course not connected to the gmoccapy functionality. What is wrong with my syntax there? Can you even net pins directly to pins? So far LinuxCNC is detecting the change in E-Etop state, but not yet reacting to the direct machine start command.
In the PNCconf generated HAL you have the line:
net machine-is-on halui.machine.is-on
so I wanted to use that to command the latching relay.
net machine-is-on => hm2_5i25.0.7i84.0.2.output-08
this is putting the tail before the dog, as this signal wont go true until after the LinuxCNC button second from top is pushed. I was going to use that LinuxCNC machine start button for drive enable on the Indramat, but I guess it can do both. Unless there a HAL signal like "LinuxCNC is ready for the machine to be turned on", then to start you'll need to hold down both the physical start switch and the second soft key " machine start", as that does trigger the machine-is-on signal. I tried it the double button push, but it didn't latch. I'll take a break and see what wiring screw up I made on that signal.
Question - is there a "LinuxCNC is ready for the machine to be turned on" signal available?
I guess a two button push start is true to the machines Phillips 432 DNA.
Mark
Mark
Last edit: 08 Nov 2017 21:10 by RotarySMP.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19876
- Thank you received: 4642
09 Nov 2017 13:27 - 09 Nov 2017 13:28 #101551
by andypugh
The "net" command always needs to have a signal as the first entry. And you can choose any name. To connect two pins you can useall on one line, or use multiple lines (quite often in different HAL files)
There _no_ pre-defined signals. They are all defined in your HAL files. What you probably want is to make a signal driven by one of the iocontrol pins
linuxcnc.org/docs/2.7/html/man/man1/iocontrol.1.html
There is a chance you might need the "not" HAL function
linuxcnc.org/docs/2.7/html/man/man9/not.9.html
It is also worth looking through the halui and motion pin lists. Between the three you can find pins to do most things.
linuxcnc.org/docs/2.7/html/man/man1/halui.1.html
linuxcnc.org/docs/2.7/html/man/man9/motion.9.html
Replied by andypugh on topic Retrofitting a 1986 Maho MH400E
What I didn't realise is that gmoccapy.v-button-0 is a predefined pin. My net above creates a second gmoccapy.v-button-0 as a signal, which follows the input, but is of course not connected to the gmoccapy functionality. What is wrong with my syntax there? Can you even net pins directly to pins?
The "net" command always needs to have a signal as the first entry. And you can choose any name. To connect two pins you can use
net signal pin1 pin2 pin3 pin4 pin5 ...net signal pin1
...
net signal pin2 pin3
...
net signal pin4 pin5 pin6Question - is there a "LinuxCNC is ready for the machine to be turned on" signal available?
There _no_ pre-defined signals. They are all defined in your HAL files. What you probably want is to make a signal driven by one of the iocontrol pins
linuxcnc.org/docs/2.7/html/man/man1/iocontrol.1.html
There is a chance you might need the "not" HAL function
linuxcnc.org/docs/2.7/html/man/man9/not.9.html
It is also worth looking through the halui and motion pin lists. Between the three you can find pins to do most things.
linuxcnc.org/docs/2.7/html/man/man1/halui.1.html
linuxcnc.org/docs/2.7/html/man/man9/motion.9.html
Last edit: 09 Nov 2017 13:28 by andypugh.
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1633
- Thank you received: 595
09 Nov 2017 13:31 - 04 Sep 2018 20:26 #101553
by RotarySMP
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
After sleeping on it, I figured out the problem with connecting to the gmoccapy.v-button-0 pin. This is only available after the gui loads, so I moved the net to the postgui.hal.
net sig_gmoccapy.v-button.0 <= hm2_5i25.0.7i77.0.0.input-04-not
net sig_gmoccapy.v-button.0 => gmoccapy.v-button-0
...works.
When I push both my physical start button and the machine run gui soft key, both the
machine-is-on and hm2_5i25.0.7i84.0.2.output-08, but the 19K1 relay is not latching. Need to take another look at that wiring.
I hope I get faster at this stuff, as keeping making three errors per net will make this project stretch till the cows come home.
Mark
net sig_gmoccapy.v-button.0 <= hm2_5i25.0.7i77.0.0.input-04-not
net sig_gmoccapy.v-button.0 => gmoccapy.v-button-0
...works.
When I push both my physical start button and the machine run gui soft key, both the
machine-is-on and hm2_5i25.0.7i84.0.2.output-08, but the 19K1 relay is not latching. Need to take another look at that wiring.
I hope I get faster at this stuff, as keeping making three errors per net will make this project stretch till the cows come home.
Mark
Last edit: 04 Sep 2018 20:26 by RotarySMP.
Please Log in or Create an account to join the conversation.
- RotarySMP
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1633
- Thank you received: 595
09 Nov 2017 21:14 - 09 Nov 2017 21:19 #101581
by RotarySMP
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Thanks for the info Andy. That signals are only created in the HAL is helpful to know. I think my latching problem is in the MAHO relay board. The On button on the MAHO starts the Hydraulics, so I need to physically make that circuit, and see if that enables the latching logic.
While thinking over the latching relay, I decided to wire up the Y encoder and see if I could get progress there.
First thing I found when I started preparing the EXE output cable, is that the wiring colors don't match to MAHO wiring diagram.
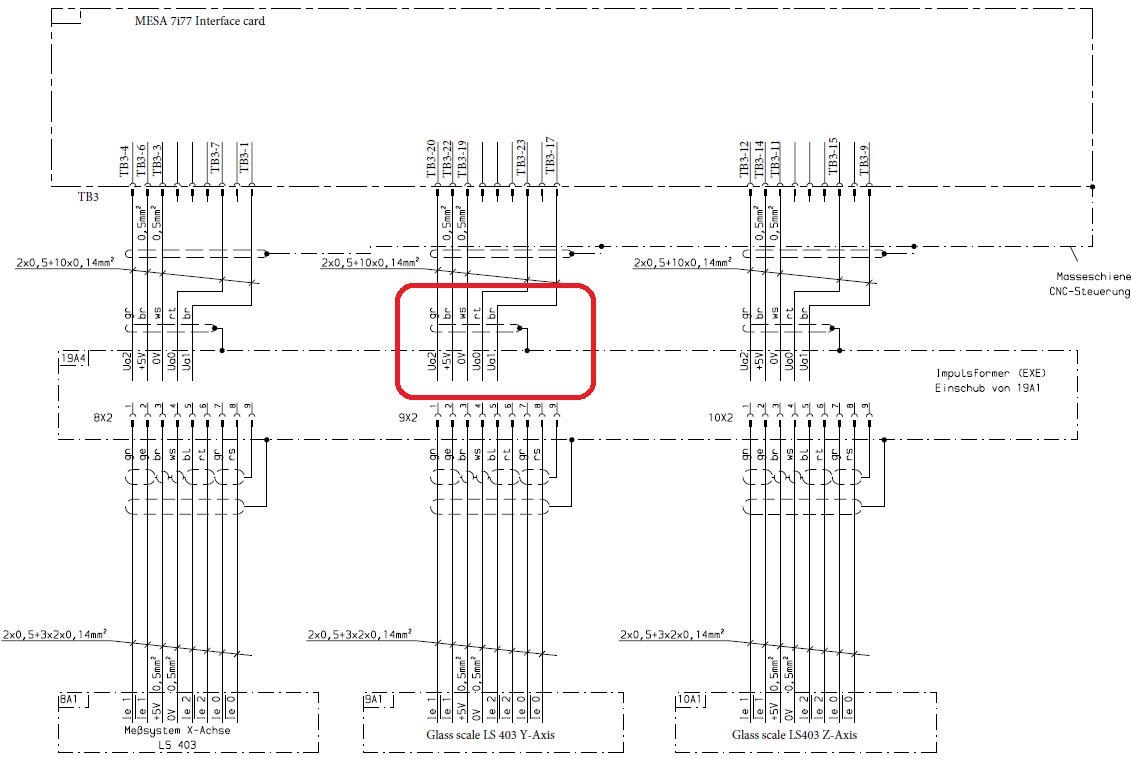
According to MAHO, the EXE output cable should have two browns, green red and white. That would have agreed with the modern version of the EXE datasheet
Unfortunatly, the cable is exactly the same as the analog wiring between the scale and EXE per the data sheet. four twisted pairs - White/brown, Green/yellow, Pink/grey, red/blue.
I connected the Y axis encoder, as it is easy to reach and move that motor pulley. White / Brown to (0v / +5V). As long as they are correct, all the other wires such have signals, even if the wrong ones.
This is hm2.5i25.0.0.encoder-01. The HAL for this was generated by the PNCconf. Absolutely nothing can be seen in Linuxcnc or HAL Show. Any troublehooting recommendations would be appreciated.
I already checked that the 7i77 is outputing +5V and 0V on its power pins. I guess my next step will be to put an Osci on the A and B channel pins and see if anything is there. One weird thing is that the EXE circuit board has test points for both 5V and 12V, but in this implementation, 12V is not applied per the MAHO wiring diagram. I can also check that the 5V is correct nthe EXE board.
Mark
While thinking over the latching relay, I decided to wire up the Y encoder and see if I could get progress there.
First thing I found when I started preparing the EXE output cable, is that the wiring colors don't match to MAHO wiring diagram.
According to MAHO, the EXE output cable should have two browns, green red and white. That would have agreed with the modern version of the EXE datasheet
Unfortunatly, the cable is exactly the same as the analog wiring between the scale and EXE per the data sheet. four twisted pairs - White/brown, Green/yellow, Pink/grey, red/blue.
I connected the Y axis encoder, as it is easy to reach and move that motor pulley. White / Brown to (0v / +5V). As long as they are correct, all the other wires such have signals, even if the wrong ones.
This is hm2.5i25.0.0.encoder-01. The HAL for this was generated by the PNCconf. Absolutely nothing can be seen in Linuxcnc or HAL Show. Any troublehooting recommendations would be appreciated.
I already checked that the 7i77 is outputing +5V and 0V on its power pins. I guess my next step will be to put an Osci on the A and B channel pins and see if anything is there. One weird thing is that the EXE circuit board has test points for both 5V and 12V, but in this implementation, 12V is not applied per the MAHO wiring diagram. I can also check that the 5V is correct nthe EXE board.
Mark
Last edit: 09 Nov 2017 21:19 by RotarySMP.
Please Log in or Create an account to join the conversation.
- drimaropoylos
- Offline
- Elite Member
-
Less
More
- Posts: 265
- Thank you received: 40
09 Nov 2017 21:27 - 09 Nov 2017 21:28 #101582
by drimaropoylos
Replied by drimaropoylos on topic Retrofitting a 1986 Maho MH400E
For start you can use multimeter, the oscilloscope is better but bulky.
John
John
Last edit: 09 Nov 2017 21:28 by drimaropoylos.
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.336 seconds