Raspberry Pi 4
- Bertho
- Offline
- Junior Member
-

Less
More
- Posts: 33
- Thank you received: 4
06 Oct 2019 15:22 #147252
by Bertho
Getting the proper RT kernel functioning may be some work yet.
Replied by Bertho on topic Raspberry Pi 4
Well, that should be fixed now. It has been integrated into the 2.8 and master trees....it gives me hope that someday, spi will work on the 4...
Getting the proper RT kernel functioning may be some work yet.
Please Log in or Create an account to join the conversation.
- Gene1934
- Offline
- Elite Member
-

Less
More
- Posts: 174
- Thank you received: 13
06 Oct 2019 16:46 #147267
by Gene1934
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Replied by Gene1934 on topic Raspberry Pi 4
I have built the 4.19.y but haven't managed to get LCNC working, theres a missing library whse name I've forgotten in the ensuing time since I last tried. I think I'll need to figure out where the mouse and keyboard went, would like to get the screen running full screen with the 4.19.y kernel running, then build lcnc in that environment. It may be that I don't have the 4.19.7x something fully installed, and I'm getting a thought that none of the dtb stuff is being loaded. I'm loading the kerrnel-rt by use of the kernel= option in config.txt, and nothing else has been re-written in /boot.
A step by step install would be most helpfull. So would the RealtimePi kit being brought up to the new video. Its still building a 4.14.y rt kernel to replace the 4.19.y as of yesterday on the pi3.
And I don't think the 4.14.y kernels know anything about the 40x faster video that can be had from the 4.19.y kernel, w/o the rt, while running on the pi3.
Getting both combined on the same u-sd would work a heck of a lot better according to my thinking.
Now to see what my lady wants for dinner, and then go try the latest build on the pi4.
Thanks Bertho.
A step by step install would be most helpfull. So would the RealtimePi kit being brought up to the new video. Its still building a 4.14.y rt kernel to replace the 4.19.y as of yesterday on the pi3.
And I don't think the 4.14.y kernels know anything about the 40x faster video that can be had from the 4.19.y kernel, w/o the rt, while running on the pi3.
Getting both combined on the same u-sd would work a heck of a lot better according to my thinking.
Now to see what my lady wants for dinner, and then go try the latest build on the pi4.
Thanks Bertho.
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Please Log in or Create an account to join the conversation.
- skunkworks
- Offline
- Moderator
-

Less
More
- Posts: 349
- Thank you received: 152
06 Oct 2019 19:48 #147285
by skunkworks
Replied by skunkworks on topic Raspberry Pi 4
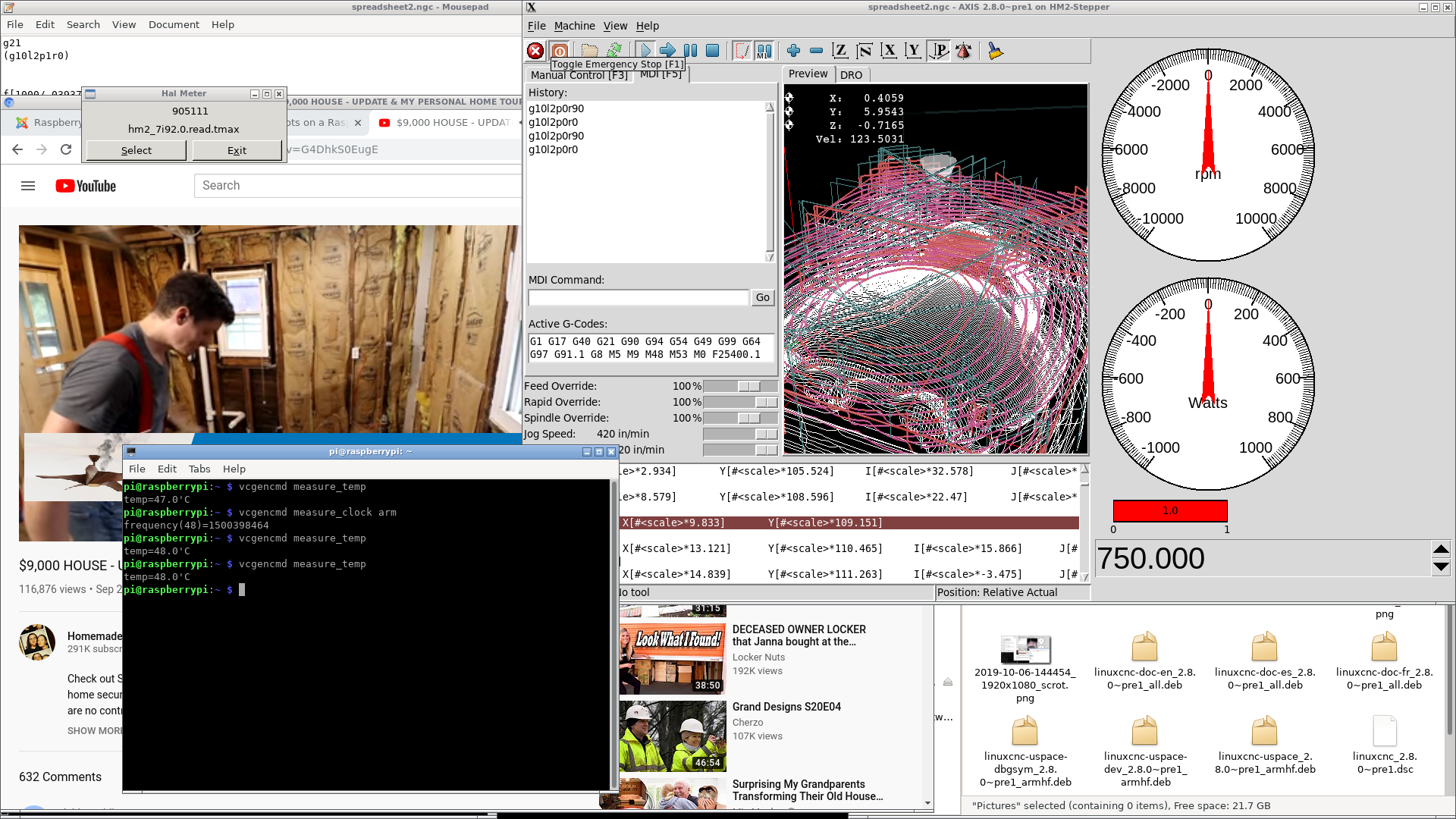
Ok - after playing I was still getting random following errors - cause by the servo thread going over 2.5ms... (I have a 2ms servo thread currently)
Looking at the 'vcgencmd measure_clock arm' the cpu seemed to be only running at 600mhz, On a normal 'pc' the realtime runs the cpu to max frequency. So looking around I added
force_turbo=1 to the config.txt
Now
pi@raspberrypi:~ $ vcgencmd measure_clock arm
frequency(48)=1500398464
pi@raspberrypi:~ $ vcgencmd measure_temp
temp=44.0'C
I am pretty sure you need active cooling for this to work - it will still throttle down the cpu frequency if it hits it temp limit.
I have been running for hours and the peak mesa read time is .6ms
I also am only isolating core 3..
And - holy crap - I can run youtube videos.. (atleast so far...)
Looking at the 'vcgencmd measure_clock arm' the cpu seemed to be only running at 600mhz, On a normal 'pc' the realtime runs the cpu to max frequency. So looking around I added
force_turbo=1 to the config.txt
Now
pi@raspberrypi:~ $ vcgencmd measure_clock arm
frequency(48)=1500398464
pi@raspberrypi:~ $ vcgencmd measure_temp
temp=44.0'C
I am pretty sure you need active cooling for this to work - it will still throttle down the cpu frequency if it hits it temp limit.
I have been running for hours and the peak mesa read time is .6ms
I also am only isolating core 3..
And - holy crap - I can run youtube videos.. (atleast so far...)
Please Log in or Create an account to join the conversation.
- Bertho
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 4
06 Oct 2019 20:41 #147287
by Bertho
That is why there is a note in the hm2_rpspi.9 manpage:
For optimal performance on the Rpi3, you must disable the "ondemand" CPU frequency governor. You may add the following to your /etc/rc.local file:
echo -n 1200000 > /sys/devices/system/cpu/cpufreq/policy0/scaling_min_freq
echo -n performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor
The governor needs to be performance on any RPi you use. There is no point in doing a few Watts power save on the RPi when your machine happily churns away at few kiloWatts...
At 1.5GHz it looks like you are overclocking the CPU. This may or may not work on the RPi3 in the long run. Or are you using a RPi4?
Replied by Bertho on topic Raspberry Pi 4
Ok - after playing I was still getting random following errors - cause by the servo thread going over 2.5ms... (I have a 2ms servo thread currently)
Looking at the 'vcgencmd measure_clock arm' the cpu seemed to be only running at 600mhz, On a normal 'pc' the realtime runs the cpu to max frequency. So looking around I added
force_turbo=1 to the config.txt
That is why there is a note in the hm2_rpspi.9 manpage:
For optimal performance on the Rpi3, you must disable the "ondemand" CPU frequency governor. You may add the following to your /etc/rc.local file:
echo -n 1200000 > /sys/devices/system/cpu/cpufreq/policy0/scaling_min_freq
echo -n performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor
The governor needs to be performance on any RPi you use. There is no point in doing a few Watts power save on the RPi when your machine happily churns away at few kiloWatts...
At 1.5GHz it looks like you are overclocking the CPU. This may or may not work on the RPi3 in the long run. Or are you using a RPi4?
Please Log in or Create an account to join the conversation.
- Gene1934
- Offline
- Elite Member
-
Less
More
- Posts: 174
- Thank you received: 13
06 Oct 2019 21:24 #147290
by Gene1934
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Replied by Gene1934 on topic Raspberry Pi 4
I just added those 2 lines to my rc.local.
It got done, and glxgears still smokes, but LCNC isn't happy, throwing following errors because its not fully pre-emptable, anything over about 3.5 ipm is a following error.
uname -a says:
Linux picnc 4.19.71-v7 #2 SMP PREEMPT Sun Oct 6 15:50:46 EDT 2019 armv7l GNU/Linux
I went back into a make menuconfig and this time, like last but it didn't register, but the fully pre-emptable choice isn't there. Best is low latency desktop. So while lcnc signs on a heck of a lot faster, but the shell its launched from is saying non-realtime. This is 4.19.y. Seems like I ought to have that last build it choice, but I don't . Can that be added to the .config with a text editor? Or has some other option locked that out?
Thanks Bertho
It got done, and glxgears still smokes, but LCNC isn't happy, throwing following errors because its not fully pre-emptable, anything over about 3.5 ipm is a following error.
uname -a says:
Linux picnc 4.19.71-v7 #2 SMP PREEMPT Sun Oct 6 15:50:46 EDT 2019 armv7l GNU/Linux
I went back into a make menuconfig and this time, like last but it didn't register, but the fully pre-emptable choice isn't there. Best is low latency desktop. So while lcnc signs on a heck of a lot faster, but the shell its launched from is saying non-realtime. This is 4.19.y. Seems like I ought to have that last build it choice, but I don't . Can that be added to the .config with a text editor? Or has some other option locked that out?
Thanks Bertho
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Please Log in or Create an account to join the conversation.
- skunkworks
- Offline
- Moderator
-
Less
More
- Posts: 349
- Thank you received: 152
07 Oct 2019 00:04 #147302
by skunkworks
Replied by skunkworks on topic Raspberry Pi 4
This is a rpi4.. As I am not using spi - I was not familiar with the behavior... On a 'normal pc' the realtime kernel usually locks the cpu frequency at its peak.
sam
sam
Ok - after playing I was still getting random following errors - cause by the servo thread going over 2.5ms... (I have a 2ms servo thread currently)
Looking at the 'vcgencmd measure_clock arm' the cpu seemed to be only running at 600mhz, On a normal 'pc' the realtime runs the cpu to max frequency. So looking around I added
force_turbo=1 to the config.txt
That is why there is a note in the hm2_rpspi.9 manpage:
For optimal performance on the Rpi3, you must disable the "ondemand" CPU frequency governor. You may add the following to your /etc/rc.local file:
echo -n 1200000 > /sys/devices/system/cpu/cpufreq/policy0/scaling_min_freq
echo -n performance > /sys/devices/system/cpu/cpufreq/policy0/scaling_governor
The governor needs to be performance on any RPi you use. There is no point in doing a few Watts power save on the RPi when your machine happily churns away at few kiloWatts...
At 1.5GHz it looks like you are overclocking the CPU. This may or may not work on the RPi3 in the long run. Or are you using a RPi4?
Please Log in or Create an account to join the conversation.
- skunkworks
- Offline
- Moderator
-
Less
More
- Posts: 349
- Thank you received: 152
07 Oct 2019 00:17 #147303
by skunkworks
Replied by skunkworks on topic Raspberry Pi 4
Addendum....
The following user(s) said Thank You: bevins
Please Log in or Create an account to join the conversation.
- skunkworks
- Offline
- Moderator
-
Less
More
- Posts: 349
- Thank you received: 152
15 Oct 2019 02:05 #147908
by skunkworks
Replied by skunkworks on topic Raspberry Pi 4
umm - some more testing...
integrating this hal file that takes into account read errors...
forum.linuxcnc.org/27-driver-boards/3514...oint-following-error
integrating this hal file that takes into account read errors...
forum.linuxcnc.org/27-driver-boards/3514...oint-following-error
Please Log in or Create an account to join the conversation.
- Gene1934
- Offline
- Elite Member
-
Less
More
- Posts: 174
- Thank you received: 13
16 Oct 2019 21:38 #148048
by Gene1934
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Replied by Gene1934 on topic Raspberry Pi 4
I just discovered that I have NOT put in the above .h file in my build tree. Dumb old man. That might be my problem with the config string treatment. I will see about a rebuild and test run yet tonight.
Cheers, Gene Heskett
--
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
Genes Web page <geneslinuxbox.net:6309/gene>
Please Log in or Create an account to join the conversation.
- jtheath
- Offline
- New Member
-

Less
More
- Posts: 14
- Thank you received: 1
30 Oct 2019 01:28 - 30 Oct 2019 01:33 #149092
by jtheath
Replied by jtheath on topic Raspberry Pi 4
Hello All,
First off thank you for posting your experiences here! I received a new RPi4 with active cooling case last week and worked this weekend to get it up and running. I copied over a running config from the previous controller and it needed conversion which was done automagically. The machine moves and seems to run well. Jog works fine when using the keyboard cursor keys but the pyvcp jog panel component no longer works. I fired up the HAL Meter and checked that all the halui.axis variables are set correctly and they are. I'm scratching my head.
Oh, I built both the kernel and LCNC from source. Used current github.com/linuxcnc master branch.
This machine uses a 7i92, an MX4660 for the stepper driver and is a dual X gantry which uses the gantry component. Any ideas as to what I'm missing?
Thank you, Joe
First off thank you for posting your experiences here! I received a new RPi4 with active cooling case last week and worked this weekend to get it up and running. I copied over a running config from the previous controller and it needed conversion which was done automagically. The machine moves and seems to run well. Jog works fine when using the keyboard cursor keys but the pyvcp jog panel component no longer works. I fired up the HAL Meter and checked that all the halui.axis variables are set correctly and they are. I'm scratching my head.
Oh, I built both the kernel and LCNC from source. Used current github.com/linuxcnc master branch.
This machine uses a 7i92, an MX4660 for the stepper driver and is a dual X gantry which uses the gantry component. Any ideas as to what I'm missing?
Thank you, Joe
Attachments:
Last edit: 30 Oct 2019 01:33 by jtheath.
Please Log in or Create an account to join the conversation.
Time to create page: 0.889 seconds