Raspberry Pi 4
- gtt38
- Offline
- Senior Member
-

Less
More
- Posts: 79
- Thank you received: 4
10 Mar 2020 23:02 #159710
by gtt38
Replied by gtt38 on topic Raspberry Pi 4
I know how it's work now.
I need to fork linuxcnc and add my board to rpspi.c and compile again linuxcnc (i made an image just before the linuxcnc compilation). If someone could tell me how to compile only the rpspi.c without recompile all linuxcnc, it could save me a lot of time.
I need to fork linuxcnc and add my board to rpspi.c and compile again linuxcnc (i made an image just before the linuxcnc compilation). If someone could tell me how to compile only the rpspi.c without recompile all linuxcnc, it could save me a lot of time.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5283
11 Mar 2020 01:34 #159734
by PCW
Heres what I get with a servo thread only (about 4 hours):
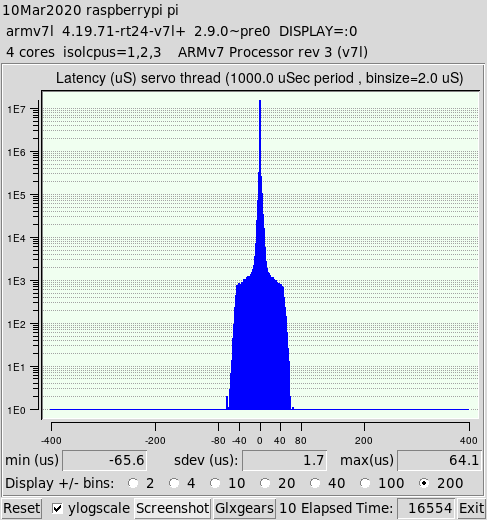
Replied by PCW on topic Raspberry Pi 4
I just run latency test. Base thread is good, around 50,000.
Heres what I get with a servo thread only (about 4 hours):
Attachments:
Please Log in or Create an account to join the conversation.
- COlger81
-

- Offline
- Elite Member
-

Less
More
- Posts: 187
- Thank you received: 6
11 Mar 2020 13:57 #159773
by COlger81
Replied by COlger81 on topic Raspberry Pi 4
I will reinstall and give it another go.
Please Log in or Create an account to join the conversation.
- COlger81
-
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
11 Mar 2020 14:09 #159775
by COlger81
Replied by COlger81 on topic Raspberry Pi 4
Peter,
Assuming that i can get the latency issue worked out. Do you see any issues running Pi4 4gb reliably with ethernet based Mesa boards and PWM signal generation?
Assuming that i can get the latency issue worked out. Do you see any issues running Pi4 4gb reliably with ethernet based Mesa boards and PWM signal generation?
Please Log in or Create an account to join the conversation.
- thadwald
- Offline
- Premium Member
-

Less
More
- Posts: 111
- Thank you received: 10
11 Mar 2020 16:23 #159781
by thadwald
Replied by thadwald on topic Raspberry Pi 4
I would like to use the pi4 as the controller for a small headless machine, with software stepping. I think I can get away with a base thread period of 250us and still have plenty of speed headroom. I'm using Trinamic stepper drivers with full-stepping and 200 step/rev motors which works out to 1200rpm.
I'm getting latency of about 50us on the base thread and around 40 on the servo thread. This comes to an error of about 20%. Is 20% an acceptable error for stepper driving?
I also have some questions on processor affinity and how linuxcnc picks the processor for the realtime threads. I noticed that Gene included the isolcpus=3 in the cmdline.txt file. I've also seen isolcpus=3,4. From what I guess, this locks those cores out of the operating system's scheduler, thereby making them available to realtime tasks? Is this accurate?
With isolcpus=3, I can see that core 4 gets the high cpu usage (according to htop) with a short base thread interval (say10000ns). I was expecting this to be core 3. Can someone explain how this works?
I'm getting latency of about 50us on the base thread and around 40 on the servo thread. This comes to an error of about 20%. Is 20% an acceptable error for stepper driving?
I also have some questions on processor affinity and how linuxcnc picks the processor for the realtime threads. I noticed that Gene included the isolcpus=3 in the cmdline.txt file. I've also seen isolcpus=3,4. From what I guess, this locks those cores out of the operating system's scheduler, thereby making them available to realtime tasks? Is this accurate?
With isolcpus=3, I can see that core 4 gets the high cpu usage (according to htop) with a short base thread interval (say10000ns). I was expecting this to be core 3. Can someone explain how this works?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
11 Mar 2020 17:35 - 11 Mar 2020 17:36 #159785
by PCW
I have not done much work with the RPI4 over Ethernet, just SPI.
Forum member skunkworks has been running a RPI4 with a 7I92 for a few
Months now and I don't believe he has any major issues _but_
he did need to run the servo thread at 2 ms (500 Hz) rather than
the standard 1 ms (1 KHz). This may or may not be an issue depending
on the required acceleration. I have been running SPI based cards at 1 KHz
without issue, though you cannot get away with running videos at the same
time as LinuxCNC is running.
Replied by PCW on topic Raspberry Pi 4
Peter,
Assuming that i can get the latency issues worked out. Do you see any issues running Pi4 4gb reliably with ethernet based Mesa boards and PWM signal generation?
I have not done much work with the RPI4 over Ethernet, just SPI.
Forum member skunkworks has been running a RPI4 with a 7I92 for a few
Months now and I don't believe he has any major issues _but_
he did need to run the servo thread at 2 ms (500 Hz) rather than
the standard 1 ms (1 KHz). This may or may not be an issue depending
on the required acceleration. I have been running SPI based cards at 1 KHz
without issue, though you cannot get away with running videos at the same
time as LinuxCNC is running.
Last edit: 11 Mar 2020 17:36 by PCW.
Please Log in or Create an account to join the conversation.
- jj80909
- Offline
- New Member
-

Less
More
- Posts: 13
- Thank you received: 3
11 Mar 2020 22:47 #159822
by jj80909
Replied by jj80909 on topic Raspberry Pi 4
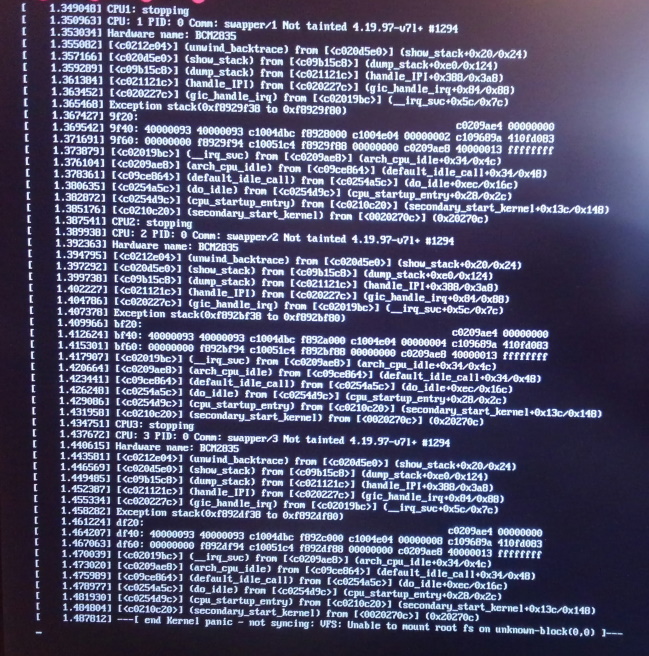
I followed the directions on John Thornton's gnipsel page and got as far as rebooting the rpi4, but it hangs and I get the following message:
---[ end Kernel panic - not syncing: VFS: Unable to mount root fs on unkown-block90,0) ]---
I'm pretty sure I followed the steps to the letter, but I wonder if I didn't leave a space when appending the following to the boot file:
quiet splash lapic noxsave acpi_osi= isolcpus=1,2,3 idle=poll acpi_irq_nobalance noirqbalance vmalloc=32MB clocksource=acpi_pm net.ifnames=0
Is there any way to correct this without starting over?
---[ end Kernel panic - not syncing: VFS: Unable to mount root fs on unkown-block90,0) ]---
I'm pretty sure I followed the steps to the letter, but I wonder if I didn't leave a space when appending the following to the boot file:
quiet splash lapic noxsave acpi_osi= isolcpus=1,2,3 idle=poll acpi_irq_nobalance noirqbalance vmalloc=32MB clocksource=acpi_pm net.ifnames=0
Is there any way to correct this without starting over?
Please Log in or Create an account to join the conversation.
- jj80909
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 3
11 Mar 2020 22:50 #159823
by jj80909
Replied by jj80909 on topic Raspberry Pi 4
Attachments:
Please Log in or Create an account to join the conversation.
- thadwald
- Offline
- Premium Member
-
Less
More
- Posts: 111
- Thank you received: 10
11 Mar 2020 23:39 - 12 Mar 2020 01:00 #159828
by thadwald
Replied by thadwald on topic Raspberry Pi 4
The /boot directory generally sits on a fat partition and will automatically mount on Windows, Mac and of course Linux. Remove the S.D. card, stick it into an appropriate card reader on another system, and edit the file.
Last edit: 12 Mar 2020 01:00 by thadwald. Reason: Edit for grammar
Please Log in or Create an account to join the conversation.
- BeagleBrainz
-

- Visitor
-

11 Mar 2020 23:40 #159829
by BeagleBrainz
Replied by BeagleBrainz on topic Raspberry Pi 4
What's the whole content of cmdline.txt ?
It would appear that the kernel is looking for the root filesystem but can not find it to mount.
It would appear that the kernel is looking for the root filesystem but can not find it to mount.
Please Log in or Create an account to join the conversation.
Time to create page: 0.159 seconds