Remora - ethernet NVEM / EC300 / EC500 cnc board
- fintech
- Offline
- Junior Member
-

Less
More
- Posts: 37
- Thank you received: 5
10 Feb 2023 00:37 #264191
by fintech
Replied by fintech on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
I'm a new to linuxCNC. How do get outputs to work with M7 M8 M9. trying t test some outputs. Anything else I need to configure. Anything in the ini file?
net coolant-flood => remora.output.3
net coolant-mist => remora.output.4
net coolant-flood => remora.output.3
net coolant-mist => remora.output.4
Please Log in or Create an account to join the conversation.
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 935
- Thank you received: 482
10 Feb 2023 01:21 - 10 Feb 2023 01:32 #264193
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
net iocontrol.0.coolant-flood => remora.ouput.#
net iocontrol.0.coolant-mist => remora.ouput.#
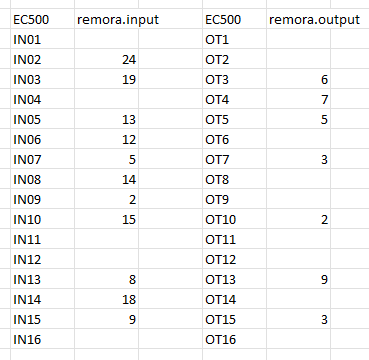
I'm still working through the IO of the EC500, but below is the mapping using the EC300/NVEM firmware version
net iocontrol.0.coolant-mist => remora.ouput.#
I'm still working through the IO of the EC500, but below is the mapping using the EC300/NVEM firmware version
Attachments:
Last edit: 10 Feb 2023 01:32 by scotta.
The following user(s) said Thank You: heiterkiter
Please Log in or Create an account to join the conversation.
- fintech
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 5
10 Feb 2023 03:46 #264197
by fintech
Replied by fintech on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Thanks Scott, I got it to work with:
net coolant-flood iocontrol.0.coolant-flood remora.output.6
net coolant-mist iocontrol.0.coolant-mist remora.output.7
Now I need to figure out inputs and spindle.
net coolant-flood iocontrol.0.coolant-flood remora.output.6
net coolant-mist iocontrol.0.coolant-mist remora.output.7
Now I need to figure out inputs and spindle.
The following user(s) said Thank You: scotta
Please Log in or Create an account to join the conversation.
- dec0077
- Offline
- New Member
-

Less
More
- Posts: 18
- Thank you received: 1
10 Feb 2023 06:31 #264206
by dec0077
Replied by dec0077 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Mine is STM32 based.
I would have to un-wire the board to be able to remove the lid, but I could take a picture if you think it could help
I would have to un-wire the board to be able to remove the lid, but I could take a picture if you think it could help
Please Log in or Create an account to join the conversation.
- Domi
- Offline
- Senior Member
-

Less
More
- Posts: 64
- Thank you received: 0
10 Feb 2023 09:06 #264211
by Domi
Replied by Domi on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hello. How do I invert the 0-10V output for the spindle? when stopped I have 10V and at maximum revolutions it is 0V. or will someone provide a hall for the spindle? I use linuxcnc 2.8.2 and NVEM V2. Well thank you
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 935
- Thank you received: 482
10 Feb 2023 20:45 #264247
by scotta
There is an example hal using lincurve to invert the output. You will need to adapt the scale and lincurve parameters appropriately.
remora-docs.readthedocs.io/en/latest/sof...incurve-compensation
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
There seems to be a few versions of the STM32 based NVEM v2, especially when it comes to the output circuit for the analogue 0-10v.Hello. How do I invert the 0-10V output for the spindle? when stopped I have 10V and at maximum revolutions it is 0V. or will someone provide a hall for the spindle? I use linuxcnc 2.8.2 and NVEM V2. Well thank you
There is an example hal using lincurve to invert the output. You will need to adapt the scale and lincurve parameters appropriately.
remora-docs.readthedocs.io/en/latest/sof...incurve-compensation
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 935
- Thank you received: 482
10 Feb 2023 20:56 #264249
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
When you say that the output is always 10v, is this the case when LinuxCNC is not talking with the board? I'm suspicious that your board might have a different circuit and IO pin than the board I used for development. A photo might help but a real pain with the NVEM not having plug headers.Mine is STM32 based.
I would have to un-wire the board to be able to remove the lid, but I could take a picture if you think it could help
Please Log in or Create an account to join the conversation.
- fintech
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 5
10 Feb 2023 21:13 #264251
by fintech
Replied by fintech on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
So far this is my working HAL on EC500 V5.
# Basic HAL config file for NVEM controller board running Remora firmware
# Configured for 3 joints (A, Y, Z axes) with home and limit switches
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
# load the Remora real-time component
loadrt remora-nv
# estop and SPI comms enable and feedback
net user-enable-out <= iocontrol.0.user-enable-out => remora.enable
net user-request-enable <= iocontrol.0.user-request-enable => remora.reset
net remora-status <= remora.status => iocontrol.0.emc-enable-in
# add the remora and motion functions to threads
addf remora.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf remora.update-freq servo-thread
addf remora.write servo-thread
# joint 0 setup (X axis)
setp remora.joint.0.scale [JOINT_0]SCALE
setp remora.joint.0.maxaccel [JOINT_0]STEPGEN_MAXACCEL
net j0pos-cmd joint.0.motor-pos-cmd => remora.joint.0.pos-cmd
net j0pos-fb remora.joint.0.pos-fb => joint.0.motor-pos-fb
net j0enable joint.0.amp-enable-out => remora.joint.0.enable
# joint 1 setup (Y axis)
setp remora.joint.1.scale [JOINT_1]SCALE
setp remora.joint.1.maxaccel [JOINT_1]STEPGEN_MAXACCEL
net j1pos-cmd joint.1.motor-pos-cmd => remora.joint.1.pos-cmd
net j1pos-fb remora.joint.1.pos-fb => joint.1.motor-pos-fb
net j1enable joint.1.amp-enable-out => remora.joint.1.enable
# joint 2 setup (Z axis)
setp remora.joint.2.scale [JOINT_2]SCALE
setp remora.joint.2.maxaccel [JOINT_2]STEPGEN_MAXACCEL
net j2pos-cmd joint.2.motor-pos-cmd => remora.joint.2.pos-cmd
net j2pos-fb remora.joint.2.pos-fb => joint.2.motor-pos-fb
net j2enable joint.2.amp-enable-out => remora.joint.2.enable
#Spindle Control 0V-10V Analog (working with 24K Spindle) At 12K getting 4.96V at 24K getting 9.77V
net spindle-cw remora.output.5
loadrt pwmgen output_type=1
loadrt scale count=1
loadrt lowpass count=1
loadrt abs count=1
addf scale.0 servo-thread
addf lowpass.0 servo-thread
addf abs.0 servo-thread
setp scale.0.gain 0.00416666667
net spindle-cmd-rpm spindle.0.speed-out => scale.0.in
net spindle-cmd-rpm-abs scale.0.out => abs.0.in
net spindle-speed-DAC abs.0.out => remora.SP.0
net spindle-cw <= spindle.0.forward
#Output Coolant Control M7 M8 M9
net coolant-flood iocontrol.0.coolant-flood remora.output.6
net coolant-mist iocontrol.0.coolant-mist remora.output.7
#Inputs
net estop-ext <= remora.input.24
net home-x <= remora.input.19
net home-y <= remora.input.13
net home-z <= remora.input.12
net spindle-index <= remora.input.5
# Basic HAL config file for NVEM controller board running Remora firmware
# Configured for 3 joints (A, Y, Z axes) with home and limit switches
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
# load the Remora real-time component
loadrt remora-nv
# estop and SPI comms enable and feedback
net user-enable-out <= iocontrol.0.user-enable-out => remora.enable
net user-request-enable <= iocontrol.0.user-request-enable => remora.reset
net remora-status <= remora.status => iocontrol.0.emc-enable-in
# add the remora and motion functions to threads
addf remora.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf remora.update-freq servo-thread
addf remora.write servo-thread
# joint 0 setup (X axis)
setp remora.joint.0.scale [JOINT_0]SCALE
setp remora.joint.0.maxaccel [JOINT_0]STEPGEN_MAXACCEL
net j0pos-cmd joint.0.motor-pos-cmd => remora.joint.0.pos-cmd
net j0pos-fb remora.joint.0.pos-fb => joint.0.motor-pos-fb
net j0enable joint.0.amp-enable-out => remora.joint.0.enable
# joint 1 setup (Y axis)
setp remora.joint.1.scale [JOINT_1]SCALE
setp remora.joint.1.maxaccel [JOINT_1]STEPGEN_MAXACCEL
net j1pos-cmd joint.1.motor-pos-cmd => remora.joint.1.pos-cmd
net j1pos-fb remora.joint.1.pos-fb => joint.1.motor-pos-fb
net j1enable joint.1.amp-enable-out => remora.joint.1.enable
# joint 2 setup (Z axis)
setp remora.joint.2.scale [JOINT_2]SCALE
setp remora.joint.2.maxaccel [JOINT_2]STEPGEN_MAXACCEL
net j2pos-cmd joint.2.motor-pos-cmd => remora.joint.2.pos-cmd
net j2pos-fb remora.joint.2.pos-fb => joint.2.motor-pos-fb
net j2enable joint.2.amp-enable-out => remora.joint.2.enable
#Spindle Control 0V-10V Analog (working with 24K Spindle) At 12K getting 4.96V at 24K getting 9.77V
net spindle-cw remora.output.5
loadrt pwmgen output_type=1
loadrt scale count=1
loadrt lowpass count=1
loadrt abs count=1
addf scale.0 servo-thread
addf lowpass.0 servo-thread
addf abs.0 servo-thread
setp scale.0.gain 0.00416666667
net spindle-cmd-rpm spindle.0.speed-out => scale.0.in
net spindle-cmd-rpm-abs scale.0.out => abs.0.in
net spindle-speed-DAC abs.0.out => remora.SP.0
net spindle-cw <= spindle.0.forward
#Output Coolant Control M7 M8 M9
net coolant-flood iocontrol.0.coolant-flood remora.output.6
net coolant-mist iocontrol.0.coolant-mist remora.output.7
#Inputs
net estop-ext <= remora.input.24
net home-x <= remora.input.19
net home-y <= remora.input.13
net home-z <= remora.input.12
net spindle-index <= remora.input.5
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 935
- Thank you received: 482
10 Feb 2023 21:27 #264252
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Thanks for sharing, it will definitely help others. You've picked up LinuxCNC quickly.
Please Log in or Create an account to join the conversation.
- dec0077
- Offline
- New Member
-
Less
More
- Posts: 18
- Thank you received: 1
10 Feb 2023 21:32 #264253
by dec0077
Replied by dec0077 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
I didn't check the voltage on VSO when Linuxcnc is not running, I didn't think it would be useful, but I can do that, it'll be just a minute to do so.
My main issue is of course the output voltage when the system is up&running, as I have everything else working fine with my board (movement, limits, inputs, outputs to enable forward and reverse rotation of the spindle, etc.) but the analog 0-10V.
I'll try to get a picture, but this time I'll leave the lid off, in case I need to access it again. I'm also guessing if, to solve the issue, I'll have to flash a new version of the firmware, I'll have to free the board again... Maybe, without the lid on, I can leave the serial headers soldered on.
I'm getting an oscilloscope, will be here in a few days, so then I should be able to understand what is going on with the VSO output (it's a shame there are no other float pins on the board, just digital ones).
Thank you
My main issue is of course the output voltage when the system is up&running, as I have everything else working fine with my board (movement, limits, inputs, outputs to enable forward and reverse rotation of the spindle, etc.) but the analog 0-10V.
I'll try to get a picture, but this time I'll leave the lid off, in case I need to access it again. I'm also guessing if, to solve the issue, I'll have to flash a new version of the firmware, I'll have to free the board again... Maybe, without the lid on, I can leave the serial headers soldered on.
I'm getting an oscilloscope, will be here in a few days, so then I should be able to understand what is going on with the VSO output (it's a shame there are no other float pins on the board, just digital ones).
Thank you
Please Log in or Create an account to join the conversation.
Time to create page: 0.281 seconds