Remora - ethernet NVEM / EC300 / EC500 cnc board
- raf1110
-
- Offline
- Senior Member
-

Less
More
- Posts: 46
- Thank you received: 5
23 Jan 2024 22:34 #291474
by raf1110
Replied by raf1110 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
pip is for python pip3 is for python3.
@aol you need Python and Python3 installed than if not already installed use Python to install pip or pip3 accordingly than
install tftpy with "pip install tftpy" or "pip3 install tftpy"
"sudo apt install python3-pip -y"
check with "pip3 --version"
It is easier to help if you post whole terminal output after running command.
don't forget to run: "sudo apt update" between installation of components and it has no errors that could cause you more headache")
I believe that pip3 was working for me to install tftpy but I found issiues with some linuxcnc deb releases although rpi should not have problem with tftpy installation.
All issiues have been mentioned earlier as well and try not to repeat already resolved problems. I wish forum to have timeline progress if in developement but we all been in here returning to 1st poage not once not twice
Still it is great pcs of work thanks @Scotta again and everyone involved.
@aol you need Python and Python3 installed than if not already installed use Python to install pip or pip3 accordingly than
install tftpy with "pip install tftpy" or "pip3 install tftpy"
"sudo apt install python3-pip -y"
check with "pip3 --version"
It is easier to help if you post whole terminal output after running command.
don't forget to run: "sudo apt update" between installation of components and it has no errors that could cause you more headache
I believe that pip3 was working for me to install tftpy but I found issiues with some linuxcnc deb releases although rpi should not have problem with tftpy installation.
All issiues have been mentioned earlier as well and try not to repeat already resolved problems. I wish forum to have timeline progress if in developement but we all been in here returning to 1st poage not once not twice
Still it is great pcs of work thanks @Scotta again and everyone involved.
Please Log in or Create an account to join the conversation.
- aol
- Offline
- Junior Member
-

Less
More
- Posts: 28
- Thank you received: 0
24 Jan 2024 08:02 #291502
by aol
Replied by aol on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
hi raff110,
thanks for your help!
i thought i have install newest version...
here is the complete terminal window.
cnc@raspberrypi:~$ pip install tftpy
error: externally-managed-environment
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.
cnc@raspberrypi:~$ pip3 install tftpy
error: externally-managed-environment
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.
cnc@raspberrypi:~$ sudo apt install python3-pip -y
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
python3-pip is already the newest version (23.0.1+dfsg-1).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
cnc@raspberrypi:~$ pip3 --version
pip 23.0.1 from /usr/lib/python3/dist-packages/pip (python 3.11)
cnc@raspberrypi:~$
hope you know now whats going wrong.
thanks in advance
aol
thanks for your help!
i thought i have install newest version...
here is the complete terminal window.
cnc@raspberrypi:~$ pip install tftpy
error: externally-managed-environment
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.
cnc@raspberrypi:~$ pip3 install tftpy
error: externally-managed-environment
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
python3-xyz, where xyz is the package you are trying to
install.
If you wish to install a non-Debian-packaged Python package,
create a virtual environment using python3 -m venv path/to/venv.
Then use path/to/venv/bin/python and path/to/venv/bin/pip. Make
sure you have python3-full installed.
If you wish to install a non-Debian packaged Python application,
it may be easiest to use pipx install xyz, which will manage a
virtual environment for you. Make sure you have pipx installed.
See /usr/share/doc/python3.11/README.venv for more information.
note: If you believe this is a mistake, please contact your Python installation or OS distribution provider. You can override this, at the risk of breaking your Python installation or OS, by passing --break-system-packages.
hint: See PEP 668 for the detailed specification.
cnc@raspberrypi:~$ sudo apt install python3-pip -y
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
python3-pip is already the newest version (23.0.1+dfsg-1).
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
cnc@raspberrypi:~$ pip3 --version
pip 23.0.1 from /usr/lib/python3/dist-packages/pip (python 3.11)
cnc@raspberrypi:~$
hope you know now whats going wrong.
thanks in advance
aol
Please Log in or Create an account to join the conversation.
- Fabien
- Offline
- New Member
-

Less
More
- Posts: 9
- Thank you received: 0
24 Jan 2024 19:03 #291545
by Fabien
Replied by Fabien on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hello everybody
I've been following this topic for a while and I think remora is really cool.
But is there a video explaining how to put the firmware on a nvem RT1052 card because I only find videos for STMs.
Thank you very much for all the information
I've been following this topic for a while and I think remora is really cool.
But is there a video explaining how to put the firmware on a nvem RT1052 card because I only find videos for STMs.
Thank you very much for all the information
Please Log in or Create an account to join the conversation.
- vpomerleau
- Away
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 3
24 Jan 2024 21:04 - 24 Jan 2024 21:05 #291552
by vpomerleau
Replied by vpomerleau on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hi everyone
-For my EC500 V5
I was able to flash my board and upload the config. I think my hal, config and component are ok in linuxcnc. I can come out of estop and the serial data look all right. My motors don't move and no error is reported in linux but the dro is changing. I have DC servo and I think my drive need the pulse to be positive low to high.
1- Does the EC500 output the pulse correctly for my drives?
2- I took the nvmpg.c component in the nvem directory, is this ok ? Not sure I have the right one
-I also own a EC500 V3 STM32F407
3-Do I have to compile the code myself to put remora on it? I don see any .bin file in the EC500 STM32 repo
4- I think no new feature gonna be added to this on but . I know the RT1052 is faster but is there other differences I need to be aware
Thank you Scott for your great work, this project is awesome
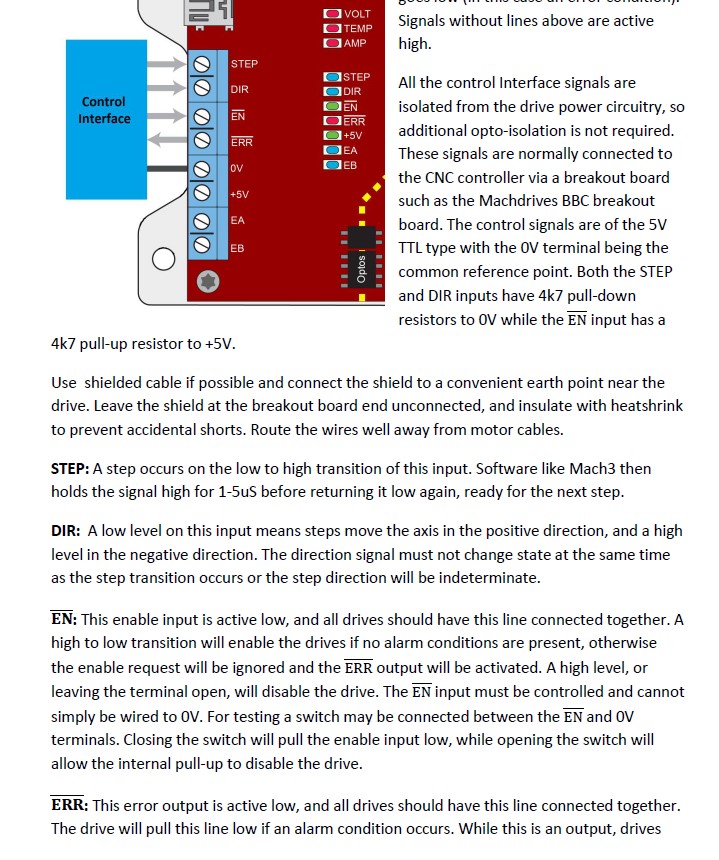
Drive documentation
-For my EC500 V5
I was able to flash my board and upload the config. I think my hal, config and component are ok in linuxcnc. I can come out of estop and the serial data look all right. My motors don't move and no error is reported in linux but the dro is changing. I have DC servo and I think my drive need the pulse to be positive low to high.
1- Does the EC500 output the pulse correctly for my drives?
2- I took the nvmpg.c component in the nvem directory, is this ok ? Not sure I have the right one
-I also own a EC500 V3 STM32F407
3-Do I have to compile the code myself to put remora on it? I don see any .bin file in the EC500 STM32 repo
4- I think no new feature gonna be added to this on but . I know the RT1052 is faster but is there other differences I need to be aware
Thank you Scott for your great work, this project is awesome
Drive documentation
Attachments:
Last edit: 24 Jan 2024 21:05 by vpomerleau.
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-

Less
More
- Posts: 926
- Thank you received: 278
25 Jan 2024 03:45 #291568
by cakeslob
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
1. you may need to change the modifier in your config file to something like PULL UP or PULL DOWN
2. , just install both github.com/scottalford75/Remora-NVEM/tre.../LinuxCNC/Components
3. , no its provided as a hex file github.com/scottalford75/Remora-EC500/tree/main/Firmware
4. the 1052 has encoder support aswell as dma stepgen
@aol, i think thats something with the new debian install. other users have that issue, unrelated to linuxcnc im fairly sure . you might have to google search to find it.
@raf, it would be more than helpful to compile all the knowedge you have required into some official documentation. remora-docs.readthedocs.io/en/latest/ , it would be very helpful. im sure we would all appreciate it.
2. , just install both github.com/scottalford75/Remora-NVEM/tre.../LinuxCNC/Components
3. , no its provided as a hex file github.com/scottalford75/Remora-EC500/tree/main/Firmware
4. the 1052 has encoder support aswell as dma stepgen
@aol, i think thats something with the new debian install. other users have that issue, unrelated to linuxcnc im fairly sure . you might have to google search to find it.
@raf, it would be more than helpful to compile all the knowedge you have required into some official documentation. remora-docs.readthedocs.io/en/latest/ , it would be very helpful. im sure we would all appreciate it.
The following user(s) said Thank You: raf1110
Please Log in or Create an account to join the conversation.
- frayja2002
- Offline
- Premium Member
-

Less
More
- Posts: 159
- Thank you received: 13
25 Jan 2024 08:06 - 25 Jan 2024 08:13 #291581
by frayja2002
Replied by frayja2002 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
aol
re :-
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
If you are using a newer version of Debian you will get this error.
I am Using Bookworm (Debian). Here is the sequence that worked for me.
sudo apt install python3-pip -y
pip3 install tftpy --break-system-packages
python3 upload_config.py ec500-rt1052-DMA_full.txt
the dramatic sounding "--break-system-packages" doesn't seem to have affected anything yet.
Thanks
Alex
re :-
× This environment is externally managed
╰─> To install Python packages system-wide, try apt install
If you are using a newer version of Debian you will get this error.
I am Using Bookworm (Debian). Here is the sequence that worked for me.
sudo apt install python3-pip -y
pip3 install tftpy --break-system-packages
python3 upload_config.py ec500-rt1052-DMA_full.txt
the dramatic sounding "--break-system-packages" doesn't seem to have affected anything yet.
Thanks
Alex
Last edit: 25 Jan 2024 08:13 by frayja2002.
Please Log in or Create an account to join the conversation.
- raf1110
-
- Offline
- Senior Member
-
Less
More
- Posts: 46
- Thank you received: 5
25 Jan 2024 18:29 #291618
by raf1110
Replied by raf1110 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
I have already thought of doing it
I would but not sure how to use git to edit. Would be probably better starting new from scratch and provide it for manual if accepted by scotta.
I have not finished configuring my machine to fully working linuxcnc.
I would but not sure how to use git to edit. Would be probably better starting new from scratch and provide it for manual if accepted by scotta.
I have not finished configuring my machine to fully working linuxcnc.
Please Log in or Create an account to join the conversation.
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
25 Jan 2024 20:46 #291623
by scotta
How have you wired your drive to the EC500? The EC500 has differential outputs, where your drive has single ended so you will need to pick up a ground and just use one side of the differential pair. You should be able to get it to work. Start with the default config so you don't have issues with step length.
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
For your SMT based EC500. The firmware is here github.com/scottalford75/Remora-EC500/tree/main/FirmwareHi everyone
-For my EC500 V5
I was able to flash my board and upload the config. I think my hal, config and component are ok in linuxcnc. I can come out of estop and the serial data look all right. My motors don't move and no error is reported in linux but the dro is changing. I have DC servo and I think my drive need the pulse to be positive low to high.
1- Does the EC500 output the pulse correctly for my drives?
2- I took the nvmpg.c component in the nvem directory, is this ok ? Not sure I have the right one
-I also own a EC500 V3 STM32F407
3-Do I have to compile the code myself to put remora on it? I don see any .bin file in the EC500 STM32 repo
4- I think no new feature gonna be added to this on but . I know the RT1052 is faster but is there other differences I need to be aware
Thank you Scott for your great work, this project is awesome
Drive documentation
How have you wired your drive to the EC500? The EC500 has differential outputs, where your drive has single ended so you will need to pick up a ground and just use one side of the differential pair. You should be able to get it to work. Start with the default config so you don't have issues with step length.
Please Log in or Create an account to join the conversation.
- Fabien
- Offline
- New Member
-
Less
More
- Posts: 9
- Thank you received: 0
26 Jan 2024 16:32 #291665
by Fabien
Replied by Fabien on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hello everyone.
No one to give me a little helping hand??
No one to give me a little helping hand??
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-
Less
More
- Posts: 926
- Thank you received: 278
27 Jan 2024 01:42 #291707
by cakeslob
Replied by cakeslob on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Please Log in or Create an account to join the conversation.
Time to create page: 0.354 seconds