Early Omniturn gang lathe to Linuxcnc?
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17931
- Thank you received: 5255
19 Oct 2019 02:49 - 19 Oct 2019 02:50 #148269
by PCW
Replied by PCW on topic Early Omniturn gang lathe to Linuxcnc?
Did you do the "accept component changes" step?
What LinuxCNC version are you using?
I cannot duplicate this error with the current pncconf (nor have I seen it in older versions)
Here what I get with a basic lathe config and selecting a 5i25 +7i77x2 with one 7i77:
# Generated by PNCconf at Fri Oct 18 19:39:54 2019
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
Now you can just globally replace "[HMOT]CARD0" with "hm2_5i25.0" and fix the hal file
but its a pretty odd error...
What LinuxCNC version are you using?
I cannot duplicate this error with the current pncconf (nor have I seen it in older versions)
Here what I get with a basic lathe config and selecting a 5i25 +7i77x2 with one 7i77:
# Generated by PNCconf at Fri Oct 18 19:39:54 2019
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
Now you can just globally replace "[HMOT]CARD0" with "hm2_5i25.0" and fix the hal file
but its a pretty odd error...
Last edit: 19 Oct 2019 02:50 by PCW.
Please Log in or Create an account to join the conversation.
- gearheaded
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

Less
More
- Posts: 29
- Thank you received: 1
19 Oct 2019 03:00 #148272
by gearheaded
Replied by gearheaded on topic Early Omniturn gang lathe to Linuxcnc?
The version of Linuxcnc I'm running is: LINUXCNC - 2.9.0-pre0-702-g895db7695
Although I new that I had "accepted changes"...I tried again and the same error.
I can try the global replace, but it would be nice to know if I am simply doing something wrong.
Thanks
Karl
Although I new that I had "accepted changes"...I tried again and the same error.
I can try the global replace, but it would be nice to know if I am simply doing something wrong.
Thanks
Karl
Please Log in or Create an account to join the conversation.
- gearheaded
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 1
19 Oct 2019 03:18 #148275
by gearheaded
Replied by gearheaded on topic Early Omniturn gang lathe to Linuxcnc?
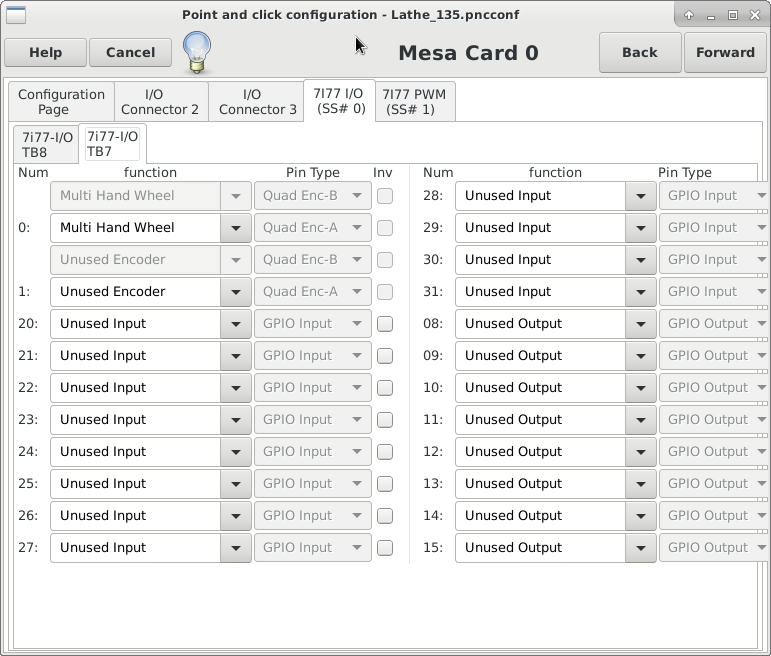
Here are some screen shots of my configuration screens if it helps:
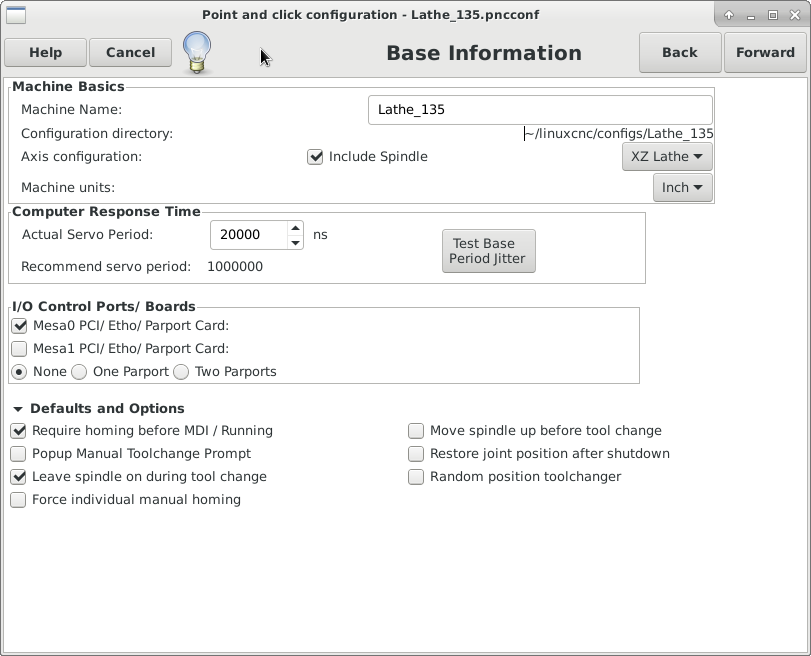
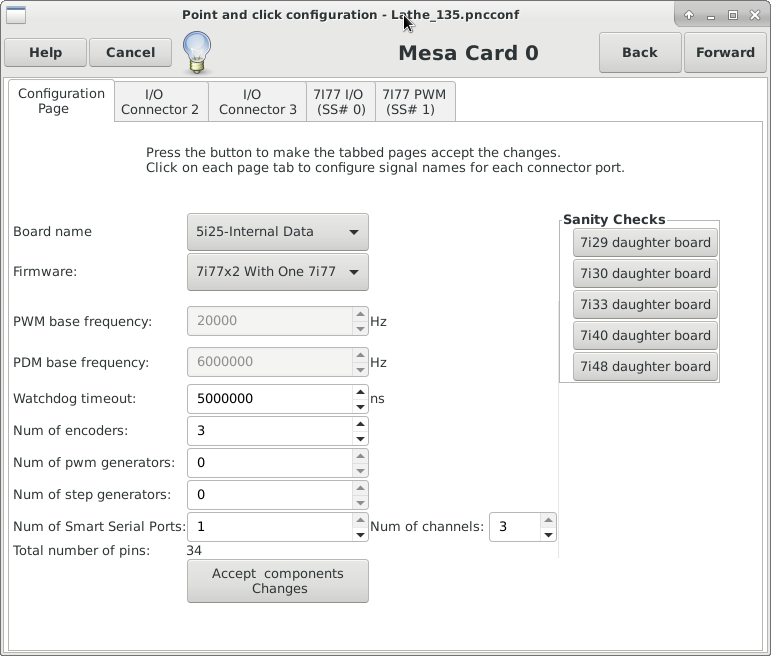
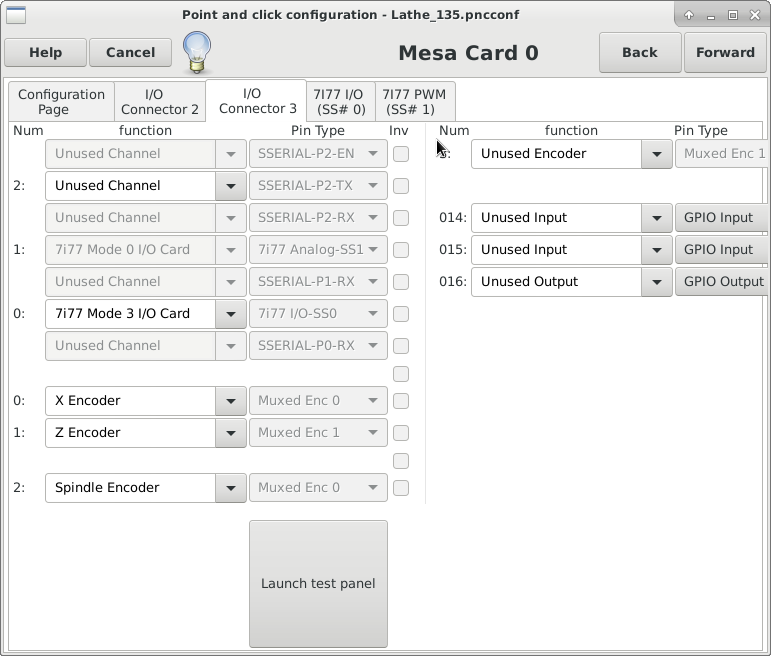
Thanks
Karl
Thanks
Karl
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
19 Oct 2019 03:25 #148276
by cmorley
Replied by cmorley on topic Early Omniturn gang lathe to Linuxcnc?
on the start page deselect 'use INI substitution'
Though I wonder why the substitution didn't work..
Chris
Though I wonder why the substitution didn't work..
Chris
Please Log in or Create an account to join the conversation.
- gearheaded
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 1
19 Oct 2019 06:33 #148289
by gearheaded
Replied by gearheaded on topic Early Omniturn gang lathe to Linuxcnc?
Hello again:
I set up a new config deselecting .ini substitution and it worked. Thank you Chris and Peter for your help.
Now I'm trying to see the count or pin change for the MPG. I can't seem to find the pin to watch in HAL Configuration.
According to the tutorial here... Gnipsel 7I77 tutorial
An example is given connecting an MPG to the 7I77 the same way I did. After connecting, the tutorial suggests opening the HAL configuration, and selecting pin enc0 to watch.
However, I can't find an enc0 pin to connect too.
Don't have much experience with Linuxcnc at this level, so any help greatly appreciated.
Thanks
Karl
I set up a new config deselecting .ini substitution and it worked. Thank you Chris and Peter for your help.
Now I'm trying to see the count or pin change for the MPG. I can't seem to find the pin to watch in HAL Configuration.
According to the tutorial here... Gnipsel 7I77 tutorial
An example is given connecting an MPG to the 7I77 the same way I did. After connecting, the tutorial suggests opening the HAL configuration, and selecting pin enc0 to watch.
However, I can't find an enc0 pin to connect too.
Don't have much experience with Linuxcnc at this level, so any help greatly appreciated.
Thanks
Karl
Please Log in or Create an account to join the conversation.
- OT-CNC
- Offline
- Platinum Member
-

Less
More
- Posts: 617
- Thank you received: 75
19 Oct 2019 14:12 #148325
by OT-CNC
Replied by OT-CNC on topic Early Omniturn gang lathe to Linuxcnc?
You may have to increase the number of encoders called in the hal to get it to show.
loadrt hm2_pci config= num_encoders=6
loadrt hm2_pci config= num_encoders=6
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
19 Oct 2019 14:51 #148330
by cmorley
Replied by cmorley on topic Early Omniturn gang lathe to Linuxcnc?
Do you have the field power supplied? Some pins don't show if field power is missing.
Chris
Chris
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
19 Oct 2019 14:54 #148331
by cmorley
The MPG encoder pins that support 1x mode are not selected this way.
They require mode 3 and change a few GPIO pins to lower speed MPG encoder pins
Replied by cmorley on topic Early Omniturn gang lathe to Linuxcnc?
You may have to increase the number of encoders called in the hal to get it to show.
loadrt hm2_pci config= num_encoders=6
The MPG encoder pins that support 1x mode are not selected this way.
They require mode 3 and change a few GPIO pins to lower speed MPG encoder pins
Please Log in or Create an account to join the conversation.
- gearheaded
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 1
19 Oct 2019 19:17 - 19 Oct 2019 19:18 #148354
by gearheaded
Replied by gearheaded on topic Early Omniturn gang lathe to Linuxcnc?
Hello:
Woke up to a dark, rainy, dreary, Pacific NW morning. Had a couple hours before needing to go make money...so I decided to reboot the system, fire up the old oscilloscope, and check my signals and such.
However, upon launching my configuration I got an error message that may explain some things, But so far, I can't seem to figure out what is causing them.
Here is the messages:
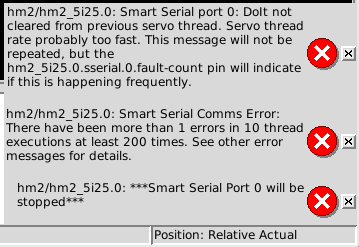
I get that it is closing down comms with the 7I77, but I don't understand the uncleared Doit, or the overall implications of the three messages. I changed the configuration and increased the servo base period to the same as recommended, and rebooted the system a couple times just to power everything down and let the caps drain off...same messages each time.
Any ideas?
Karl
Woke up to a dark, rainy, dreary, Pacific NW morning. Had a couple hours before needing to go make money...so I decided to reboot the system, fire up the old oscilloscope, and check my signals and such.
However, upon launching my configuration I got an error message that may explain some things, But so far, I can't seem to figure out what is causing them.
Here is the messages:
I get that it is closing down comms with the 7I77, but I don't understand the uncleared Doit, or the overall implications of the three messages. I changed the configuration and increased the servo base period to the same as recommended, and rebooted the system a couple times just to power everything down and let the caps drain off...same messages each time.
Any ideas?
Karl
Last edit: 19 Oct 2019 19:18 by gearheaded.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17931
- Thank you received: 5255
19 Oct 2019 19:53 - 19 Oct 2019 19:54 #148357
by PCW
Replied by PCW on topic Early Omniturn gang lathe to Linuxcnc?
Those messages are symptoms of running the servo thread too fast or generic real time problems.
1. Use 1000000 (= 1 ms) as a servo thread period
2. Verify that you are running a real time kernel and that your system real time performance is adequate
Check the kernel with
uname -a
Check real time performance with
latency-histogram --nobase
Run this for a long time while moving windows around launching big applications (like web browsers)
or watching youtube videos etc etc.
1. Use 1000000 (= 1 ms) as a servo thread period
2. Verify that you are running a real time kernel and that your system real time performance is adequate
Check the kernel with
uname -a
Check real time performance with
latency-histogram --nobase
Run this for a long time while moving windows around launching big applications (like web browsers)
or watching youtube videos etc etc.
Last edit: 19 Oct 2019 19:54 by PCW.
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.437 seconds