- Hardware & Machines
- Driver Boards
- connect raspberry via ehternet as IO-port - some developer help needed
connect raspberry via ehternet as IO-port - some developer help needed
- wicki
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 183
- Thank you received: 21
08 Jan 2019 09:26 #123766
by wicki
connect raspberry via ehternet as IO-port - some developer help needed was created by wicki
hi all,
as I told some days ago, I'm trying to develop a rasPI-interface. details here:
forum.linuxcnc.org/27-driver-boards/3577...iver-hardware#123630
my further plan, to change the hal_partport.c in the following way:
if no physical parport exists, change the inb/outb-parts of the driver in that way, that the
in- and out-bytes are stored in an share-memory-region.
if so, it will be possible to access this bytes by another RT-thread, which does a
raw-ehter-communication with a rasPI and exchange there values with the rasIP GPIO.
latency-times less then 30usec. should be possible.
what are you thinking about this idea?
is this the right way? or is it i stupid idea because of...[insert reason here] ?
or it there a way to do this job in a simpler manner?
regards
wicki
as I told some days ago, I'm trying to develop a rasPI-interface. details here:
forum.linuxcnc.org/27-driver-boards/3577...iver-hardware#123630
my further plan, to change the hal_partport.c in the following way:
if no physical parport exists, change the inb/outb-parts of the driver in that way, that the
in- and out-bytes are stored in an share-memory-region.
if so, it will be possible to access this bytes by another RT-thread, which does a
raw-ehter-communication with a rasPI and exchange there values with the rasIP GPIO.
latency-times less then 30usec. should be possible.
what are you thinking about this idea?
is this the right way? or is it i stupid idea because of...[insert reason here] ?
or it there a way to do this job in a simpler manner?
regards
wicki
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4641
09 Jan 2019 16:21 #123832
by andypugh
Replied by andypugh on topic connect raspberry via ehternet as IO-port - some developer help needed
I think that it makes no sense to modify parport.c
This should be an entirely separate driver. The whole point of HAL is that any signal can be connected to any hardware driver.
This should be an entirely separate driver. The whole point of HAL is that any signal can be connected to any hardware driver.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
18 Jan 2019 07:17 - 18 Jan 2019 07:26 #124386
by wicki
Of course, you are right.
But I've done so, because I was unable to create the whole
configure/makefile-overhead for an newly created driver.
Maybe, any reader in here is able to help me in that way?
The last documented state is here:
erste.de/rasPiCat.html
An update will follow later this day.
Yesterday I made the first tests on a 4-axis-mill (only 3 stepper actually connected).
It runs an a newly installed linuxmit 19.1 on an intel i5 with a vanilla kernel without
any realtime-patches.
"Linux Mint 19.1 Tessa"
4.15.0-43-generic #46-Ubuntu SMP Thu Dec 6 14:45:28 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux
The rasPI runs with:
"Raspbian GNU/Linux 8 (jessie)"
Linux cerec 4.4.4-rt9-v7+ #7 SMP PREEMPT RT Mon Mar 7 14:53:11 UTC 2016 armv7l GNU/Linux
to be continued....
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
I think that it makes no sense to modify parport.c
This should be an entirely separate driver. The whole point of HAL is
that any signal can be connected to any hardware driver.
Of course, you are right.
But I've done so, because I was unable to create the whole
configure/makefile-overhead for an newly created driver.
Maybe, any reader in here is able to help me in that way?
The last documented state is here:
erste.de/rasPiCat.html
An update will follow later this day.
Yesterday I made the first tests on a 4-axis-mill (only 3 stepper actually connected).
It runs an a newly installed linuxmit 19.1 on an intel i5 with a vanilla kernel without
any realtime-patches.
"Linux Mint 19.1 Tessa"
4.15.0-43-generic #46-Ubuntu SMP Thu Dec 6 14:45:28 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux
The rasPI runs with:
"Raspbian GNU/Linux 8 (jessie)"
Linux cerec 4.4.4-rt9-v7+ #7 SMP PREEMPT RT Mon Mar 7 14:53:11 UTC 2016 armv7l GNU/Linux
to be continued....
Last edit: 18 Jan 2019 07:26 by wicki. Reason: fipptheler
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
18 Jan 2019 12:50 #124399
by andypugh
You might be able to do it all in a .comp file.
linuxcnc.org/docs/2.7/html/hal/comp.html
It is certainly possible to use halcompile for an ISA card driver:
github.com/LinuxCNC/linuxcnc/blob/master.../drivers/pcl720.comp
Replied by andypugh on topic connect raspberry via ehternet as IO-port - some developer help needed
But I've done so, because I was unable to create the whole
configure/makefile-overhead for an newly created driver.
Maybe, any reader in here is able to help me in that way?
You might be able to do it all in a .comp file.
linuxcnc.org/docs/2.7/html/hal/comp.html
It is certainly possible to use halcompile for an ISA card driver:
github.com/LinuxCNC/linuxcnc/blob/master.../drivers/pcl720.comp
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
19 Jan 2019 04:39 #124432
by wicki
This may be possible and may be a way to do it, if I got it completely working first....
But I have not found a way, to create working Makefile/Submake-file or even to compile
the files in the /example-direcotry.
So I modified the hal_parport a little bit and wrote 4 tasks/threads for reading/writing
an the PC- and on the rasPI-side.
The new version will consist of only one thread on each side.
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
You might be able to do it all in a .comp file.
This may be possible and may be a way to do it, if I got it completely working first....
But I have not found a way, to create working Makefile/Submake-file or even to compile
the files in the /example-direcotry.
So I modified the hal_parport a little bit and wrote 4 tasks/threads for reading/writing
an the PC- and on the rasPI-side.
The new version will consist of only one thread on each side.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
23 Jan 2019 16:51 #124674
by wicki
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
not really amazing results....
PC-side
Linux debian 3.4-9-rtai-686-pae #1 SMP PREEMPT Debian 3.4.55-4linuxcnc i686 GNU/Linux
4 cores
model name : Intel(R) Atom(TM) CPU D525 @ 1.80GHz
bogomips : 3600.09
total used free shared buffers cached
Mem: 3350624 366124 2984500 0 63544 196052
-/+ buffers/cache: 106528 3244096
Swap: 0 0 0
Jobs:
pcIOethRaw send and receive-thread which send output of the virtual-parport
to, and receives input from the rasberry GPIO
pcTestloop sends bytes received from the raspberr GPIO-input Immediately
inverted to the raspberry GPIO-output
rasPI-side
Linux cerec 4.4.4-rt9-v7+ #7 SMP PREEMPT RT Mon Mar 7 14:53:11 UTC 2016 armv7l GNU/Linux
model name : ARMv7 Processor rev 4 (v7l)
BogoMIPS : 76.80
total used free shared buffers cached
Mem: 945164 325524 619640 14792 30788 158516
-/+ buffers/cache: 136220 808944
Swap: 102396 0 102396
Jobs:
rasPIioEthRaw send and receive-thread, which reads local GPIO-input ans sends it
Immediately to the receiving PC. packets _from_ the PC are directed
to the raspberry GPIO-out.
the result of the configuration describes above is a 2 kHz signal on the IO-Pin.
so it took about 125 usec. thats to slow....
the PC is able to send about 100k packets/second. the raspbbery is able to send
20k packets/second.
I think, it is not the best way, to do the linuxCNC/ethernet-task by polling
shared memory. Anyway: a RT-task is needed on both sides.
to be continued.....
PC-side
Linux debian 3.4-9-rtai-686-pae #1 SMP PREEMPT Debian 3.4.55-4linuxcnc i686 GNU/Linux
4 cores
model name : Intel(R) Atom(TM) CPU D525 @ 1.80GHz
bogomips : 3600.09
total used free shared buffers cached
Mem: 3350624 366124 2984500 0 63544 196052
-/+ buffers/cache: 106528 3244096
Swap: 0 0 0
Jobs:
pcIOethRaw send and receive-thread which send output of the virtual-parport
to, and receives input from the rasberry GPIO
pcTestloop sends bytes received from the raspberr GPIO-input Immediately
inverted to the raspberry GPIO-output
rasPI-side
Linux cerec 4.4.4-rt9-v7+ #7 SMP PREEMPT RT Mon Mar 7 14:53:11 UTC 2016 armv7l GNU/Linux
model name : ARMv7 Processor rev 4 (v7l)
BogoMIPS : 76.80
total used free shared buffers cached
Mem: 945164 325524 619640 14792 30788 158516
-/+ buffers/cache: 136220 808944
Swap: 102396 0 102396
Jobs:
rasPIioEthRaw send and receive-thread, which reads local GPIO-input ans sends it
Immediately to the receiving PC. packets _from_ the PC are directed
to the raspberry GPIO-out.
the result of the configuration describes above is a 2 kHz signal on the IO-Pin.
so it took about 125 usec. thats to slow....
the PC is able to send about 100k packets/second. the raspbbery is able to send
20k packets/second.
I think, it is not the best way, to do the linuxCNC/ethernet-task by polling
shared memory. Anyway: a RT-task is needed on both sides.
to be continued.....
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
24 Jan 2019 10:45 - 24 Jan 2019 10:49 #124727
by wicki
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
one day later
=============
Are the limitations from the rasPI, from the PC of from the linux-RTs?
I made further tests:
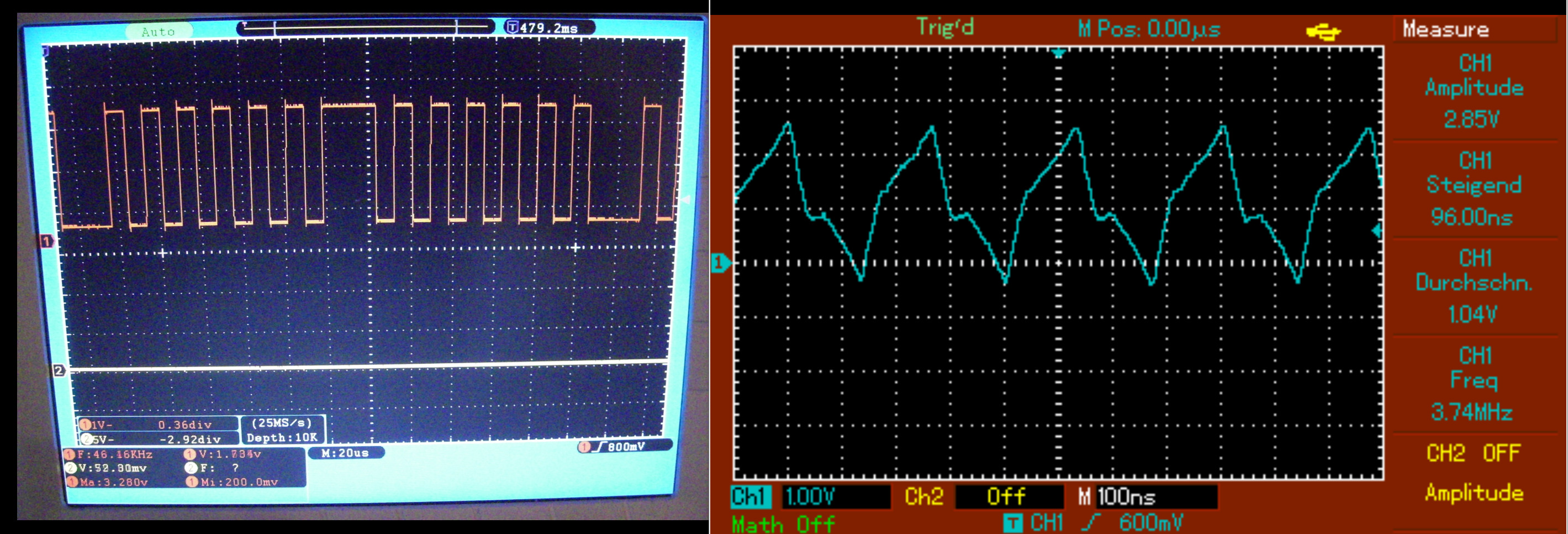
The first image shows a RT-thread of the raspberry. It toggles one GPIO-pin permanently.
The averag cycle time is 10usec. But more than 20usec are also possible.
Output frequency is about 45 kHz.
The second image is the same c-loop. But as an endless loop inside the thread.
The output frequency is 3.7 MHz(!). But the output is not really a square wave any more...
erste.de/rasPiCat.html
Next question:
What will the output of a local HAL-thread with a toggle-loop look like?
On the PC and on a rasPI.
to be continued.....
=============
Are the limitations from the rasPI, from the PC of from the linux-RTs?
I made further tests:
The first image shows a RT-thread of the raspberry. It toggles one GPIO-pin permanently.
The averag cycle time is 10usec. But more than 20usec are also possible.
Output frequency is about 45 kHz.
The second image is the same c-loop. But as an endless loop inside the thread.
The output frequency is 3.7 MHz(!). But the output is not really a square wave any more...
erste.de/rasPiCat.html
Next question:
What will the output of a local HAL-thread with a toggle-loop look like?
On the PC and on a rasPI.
to be continued.....
Last edit: 24 Jan 2019 10:49 by wicki.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
24 Jan 2019 13:18 #124732
by wicki
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
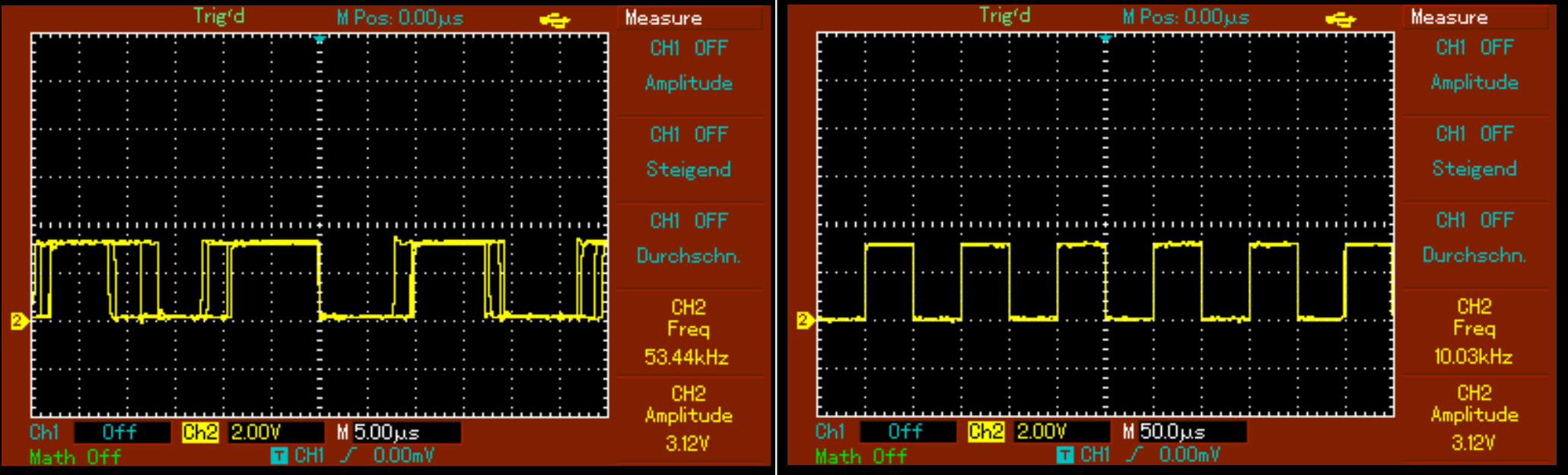
loopback-HAL-script
halcmd:
loadrt threads name1=fast period1=5000 name2=slow period2=10000000
loadrt hal_parport cfg="0x378 out"
loadrt siggen
addf parport.0.write fast
addf siggen.0.update fast
addf parport.0.read fast
net a parport.0.pin-11-in-not => parport.0.pin-02-out
start
results on PC with
loadrt threads name1=fast period1=5000 name2=slow period2=10000000
(left image)
and
loadrt threads name1=fast period1=50000 name2=slow period2=10000000
(right image)
erste.de/loopback.HAL.PC.jpg
halcmd:
loadrt threads name1=fast period1=5000 name2=slow period2=10000000
loadrt hal_parport cfg="0x378 out"
loadrt siggen
addf parport.0.write fast
addf siggen.0.update fast
addf parport.0.read fast
net a parport.0.pin-11-in-not => parport.0.pin-02-out
start
results on PC with
loadrt threads name1=fast period1=5000 name2=slow period2=10000000
(left image)
and
loadrt threads name1=fast period1=50000 name2=slow period2=10000000
(right image)
erste.de/loopback.HAL.PC.jpg
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
25 Jan 2019 11:40 #124803
by wicki
Replied by wicki on topic connect raspberry via ehternet as IO-port - some developer help needed
next test with the rasIP
lopback-HAL-script
about 5.7 kHz
loadrt threads name1=fast period1=40000 name2=slow period2=10000000
loadrt hal_gpio dir=4288672767 exclude=4088
loadrt not
addf not.0.funct fast
addf hal_gpio.read fast
addf hal_gpio.write fast
net dummy17 => hal_gpio.pin-03-out
net dummy17 <= not.0.out
net inv <= hal_gpio.pin-16-in
net inv => not.0.in
start
at period1 >40000 the system hangs.....
so, is a latency of a little bit below 100usec. enough?
I don't think so.
but I will check it again...
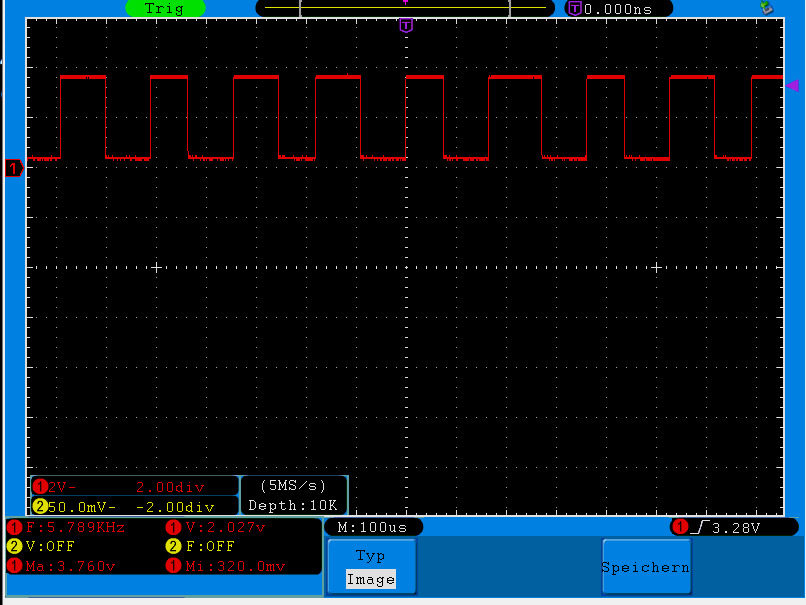
erste.de/loopback.HAL.rasPI.jpg
lopback-HAL-script
about 5.7 kHz
loadrt threads name1=fast period1=40000 name2=slow period2=10000000
loadrt hal_gpio dir=4288672767 exclude=4088
loadrt not
addf not.0.funct fast
addf hal_gpio.read fast
addf hal_gpio.write fast
net dummy17 => hal_gpio.pin-03-out
net dummy17 <= not.0.out
net inv <= hal_gpio.pin-16-in
net inv => not.0.in
start
at period1 >40000 the system hangs.....
so, is a latency of a little bit below 100usec. enough?
I don't think so.
but I will check it again...
erste.de/loopback.HAL.rasPI.jpg
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
25 Jan 2019 11:44 #124804
by andypugh
That would depend on the application. Most LinuxCNC IO happens in a 1mS thread.
The exception is step-generation, and I would imagine that if your setup was generating steps on the Pi then you would be sending step-rate information rather than individual steps.
Replied by andypugh on topic connect raspberry via ehternet as IO-port - some developer help needed
so, is a latency of a little bit below 100usec. enough?
That would depend on the application. Most LinuxCNC IO happens in a 1mS thread.
The exception is step-generation, and I would imagine that if your setup was generating steps on the Pi then you would be sending step-rate information rather than individual steps.
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
- Hardware & Machines
- Driver Boards
- connect raspberry via ehternet as IO-port - some developer help needed
Time to create page: 0.152 seconds