I have reading a lot of forums about maho retrofits. But i couldn't find enough information about how to check if the indramat 3trm2 and 1trm2 drives. They said that it can be done via using a battery with a pot or something like that. But here i am with no luck. It's a 4 axis cnc mill with rotary table. 1trm2 drives the rotary axis. Machine holds a 332 philips controller which i don't intend to use(doesn't work ). So can anyone share the schematics of wiring and tell me how can i check the drives and motors? Unfortunately i don't have manual for 1trm2 drive. If anyone can help that would be great.
I think you are going to need to find a manual, or at least some documentation.
Guessing which terminals are fault and enable, and which are the analogue velocity input is difficult otherwise.
In fact the first thing you need to know is if the drives are analogue voltage control. There are many other options.
I have attached the 3 trm2 drive manual already, but i can't figure it out (newbie), all i could figure out was that it's analogous and needs 10v for rpm. On fhe the other hand 1trm2 is totally different. It doesn't have a JF slot for enabling the drive and has 3 tacho slots. I'm attaching the pictures of 1trm2. I just want to test these drives and motors to see if they work fine
The link in the first post seems to just bring up the photo. (Though the filename looks like that of the manual)
On fhe the other hand 1trm2 is totally different. It doesn't have a JF slot for enabling the drive and has 3 tacho slots. I'm attaching the pictures of 1trm2. I just want to test these drives and motors to see if they work fine
Well, to do that you would need to enable the drives and apply a small voltage to the analogue input pins.
But enabling the drives with a dead control might not be the easiest thing.
Do you have a set of wiring diagrams from Maho? This is essential for a newbie. Contact DMG, the drawing number reference is on the machine data plate.
Assuming that the Indramat is still correctly connected to functional motors, and the transformers. You will need to apply 24VDC to each of the enable pins JF and RF, and then a small voltage between Ex01/Ex02, to get motion.
The Indramats are pretty old. I pulled the control cards out of mine (they are pretty simple) and replaced all the electrolytic capacitors, figuring sooner later one would explode.
Mark
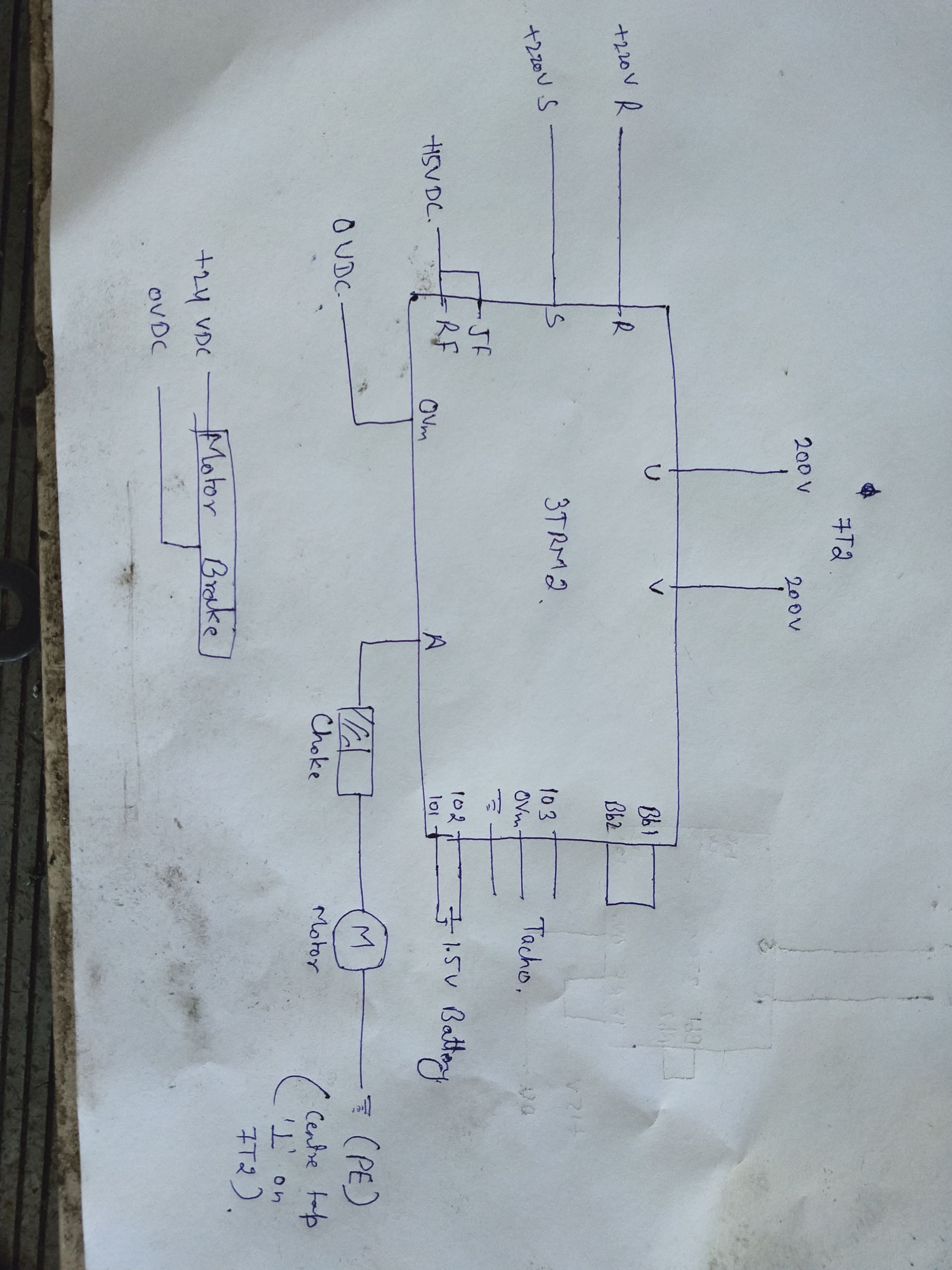
I have plotted a final diagram of the circuit. Please let me know if this is correct. And will this diagram be enough to run the motor (for a test). Let me know if I'm missing something.
Make sure you release the brake first. You dont want the motor fighting the brake. Are you mechanically disconnecting the motor? If not make sure the axis is in the middle of travel, and start with the 1.5V switched off. You haven't drawn a switch on that 1.5V battery signal. . As soon as you turn this on, it is going to run at 15% of max speed towards an end, with no protection. My little 400E maxed out at 2500mm/min, so 15% is not super fast. The 1000T probably had much faster rapids, and therefore 15% speed could still be pretty scary if you go the wrong way and are near an end. It would be preferable to use a lab PSU which you can regulate down to 0V for that signal.
Mark
I removed the brake first, i have uncoupled the motor from the system. I just wanna see if the motor and drive are ok. But this circuit doesn't seem to work...the motor doesn't move at all. Can you point out the problem? I have connected the 1.5v battery with e101 and 102. Shorted the Bb1 and Bb2 with a small wire. But the motor isn't moving at all.and also there is no voltage across UL and 0VL on L6
..... But +15v terminal is working fine.
I don't see anny error in you plan. Do you have an Indramat manual? I found one on the internet some where and could send you it if you dont already have one. It is too big to post here.
Mark