Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
- bnet
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 42
- Thank you received: 5
14 Jan 2025 23:19 #318988
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
Back from holidays, finally got to dig a little deeper with the oscilloscope. I managed to figure out the polarity of the connections and alas, I am now receiving the response from the encoder!
Some values are showing up on my HAL Show and now I need to figure out if everything is working correctly and whether or not I need to create a custom setup string.
After a slight turn (a few degrees) of the motor shaft in the reverse direction my HAL show reads:
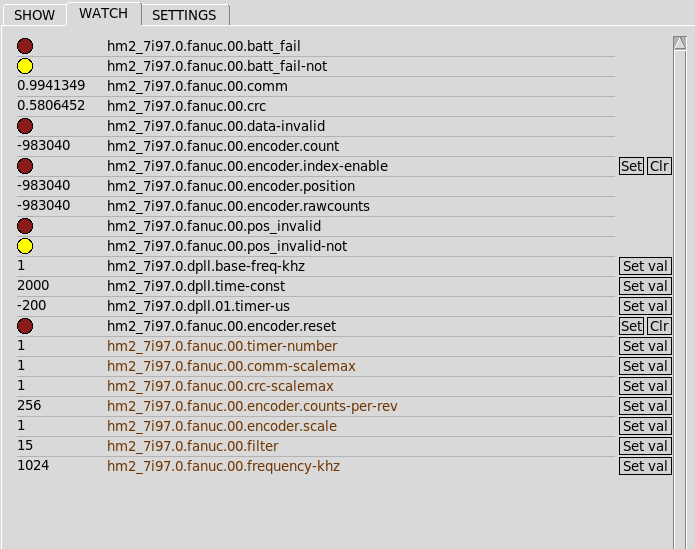
Suggestions for next steps are encouraged.
Some values are showing up on my HAL Show and now I need to figure out if everything is working correctly and whether or not I need to create a custom setup string.
After a slight turn (a few degrees) of the motor shaft in the reverse direction my HAL show reads:
Suggestions for next steps are encouraged.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17919
- Thank you received: 5247
15 Jan 2025 01:04 #318990
by PCW
Replied by PCW on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
What is the counts per turn value for the encoder?
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
15 Jan 2025 01:21 - 15 Jan 2025 01:28 #318991
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
I have not found any formal documentation on the encoders or any note in the machine’s schematics, so I don’t know.
You did say in a previous response that you thought my encoders are 1M units per revolution, in response to a post where I provided the model number.
Tomorrow I will do more testing - I will try to verify one complete rotation and see how the counts check out.
You did say in a previous response that you thought my encoders are 1M units per revolution, in response to a post where I provided the model number.
Tomorrow I will do more testing - I will try to verify one complete rotation and see how the counts check out.
Last edit: 15 Jan 2025 01:28 by bnet.
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
16 Jan 2025 18:16 #319135
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
I'm under the impression that the encoders are 1 million counts per rev. I did a crude test where I rotated the pully associated with the motor one full turn as marked by a sharpie line on the face of the pulley. Seemed to deliver around 2 million raw counts, and the pulley appears like it could be 1:2 ratio.

I also observed 4 cycles of the commutation output from the HAL Fanuc Encoder pin for one rotation (if I remember correctly!).
These computer-side details can be adjusted as I setup the system. Now I need to figure out what extra hardware I need to talk to 4 of these at once, and also how to output either commutation to the Allen-Bradley Ultra-3000 drives or incremental encoder signals. I'm fully out of inputs and outputs on my 7i76e used on the machine so I will need to get some expansion hardware.
Expansion needs:
-4x serial ports (maybe just 3 if I can also use the one in the 7i76e, but Mesa seems to sell them in breakout boards of 4 or 6).
-8 or more outputs to communicate encoder or commutation information to the Ultra3000 (still figuring out what the drives will need)
Wondering what the most cost effective Mesa solution would be to add onto my system.
Or maybe someone knows if there is there setup that does not require sending encoder or commutation information to the Ultra3000s. Can't seem to find whether or not these drives can be run 'open-loop' or/ with feedback only being taken care of on the LCNC side (doubtful?).
I also observed 4 cycles of the commutation output from the HAL Fanuc Encoder pin for one rotation (if I remember correctly!).
These computer-side details can be adjusted as I setup the system. Now I need to figure out what extra hardware I need to talk to 4 of these at once, and also how to output either commutation to the Allen-Bradley Ultra-3000 drives or incremental encoder signals. I'm fully out of inputs and outputs on my 7i76e used on the machine so I will need to get some expansion hardware.
Expansion needs:
-4x serial ports (maybe just 3 if I can also use the one in the 7i76e, but Mesa seems to sell them in breakout boards of 4 or 6).
-8 or more outputs to communicate encoder or commutation information to the Ultra3000 (still figuring out what the drives will need)
Wondering what the most cost effective Mesa solution would be to add onto my system.
Or maybe someone knows if there is there setup that does not require sending encoder or commutation information to the Ultra3000s. Can't seem to find whether or not these drives can be run 'open-loop' or/ with feedback only being taken care of on the LCNC side (doubtful?).
Attachments:
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
18 Jan 2025 04:09 #319249
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
Is it possible to run all these things together:
Mesa 7i76 E ---- 7I84 (Isolated remote field I/O card). Will use it to output quadrature signals to the Ultra3000s, it will generate this quadrature output from the Fanuc encoders [is this possible?], remaining I/O used elsewhere.
---- 7I85 (4 Channel encoder 5 channel Serial RS-422 interface). Will hook up the 4 Fanuc redcaps to 4 of these RS-422 ports. And the encoder inputs are good to have around incase I want to add linear scales (2 axis) and maybe two MPG wheels.

Sure would be great if this system worked because it happens to be two fairly inexpensive boards. Canadian dollar isn't so great right now

I would be pleased to have those encoder inlets, too.
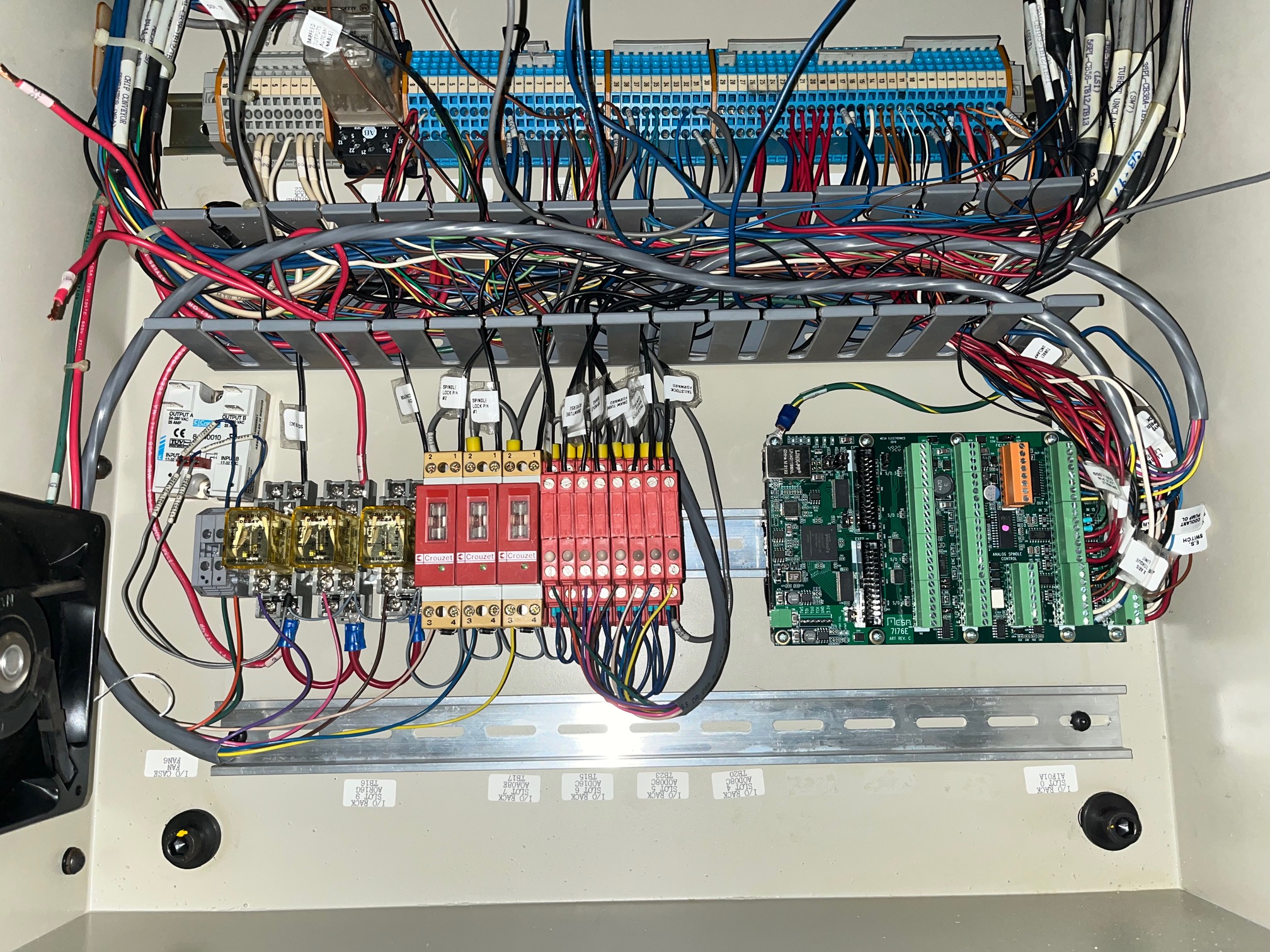
Progress pic from a little while ago:
Mesa 7i76 E ---- 7I84 (Isolated remote field I/O card). Will use it to output quadrature signals to the Ultra3000s, it will generate this quadrature output from the Fanuc encoders [is this possible?], remaining I/O used elsewhere.
---- 7I85 (4 Channel encoder 5 channel Serial RS-422 interface). Will hook up the 4 Fanuc redcaps to 4 of these RS-422 ports. And the encoder inputs are good to have around incase I want to add linear scales (2 axis) and maybe two MPG wheels.
Sure would be great if this system worked because it happens to be two fairly inexpensive boards. Canadian dollar isn't so great right now
I would be pleased to have those encoder inlets, too.
Progress pic from a little while ago:
Attachments:
The following user(s) said Thank You: besriworld
Please Log in or Create an account to join the conversation.
- tommylight
-

- Online
- Moderator
-
Less
More
- Posts: 21633
- Thank you received: 7390
18 Jan 2025 14:55 #319285
by tommylight
Replied by tommylight on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
Yes, you can use 7i76E with 7i84 with a cut in half LAN cable (see manual for wiring), and 7i85 with a IDC26 to DB25 cable (available on Mesa stores and even some older PC's have them, look for a parallel port on the back slots). BTW, 2 of 7i85 could be used as 7i76E has two IDC26 headers, or similar boards, and you can add more 7i84 or 7i79 or 7i71 or 7i72 to 7i85.
The following user(s) said Thank You: bnet
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
19 Jan 2025 19:03 #319398
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
Thanks for confirming this, I haven't used multiple Mesa boards at once before. What a great system.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-
- Online
- Moderator
-
Less
More
- Posts: 21633
- Thank you received: 7390
19 Jan 2025 20:41 #319407
by tommylight
Replied by tommylight on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
You are welcomed, always, and welcome to the "dark side" ! ")
Used them once, worked MUCH better than advertised, got unbelievably good support from PCW, used them ever since, a lot.
Used them once, worked MUCH better than advertised, got unbelievably good support from PCW, used them ever since, a lot.
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
13 Feb 2025 01:03 #321403
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
I have received the additional Mesa boards and am putting some thought into the system and wiring.
I was thinking that I would use the encoder signals to generate commutation signals to output to the Ultra3000 drives. The drives have inputs for Commutation Channel S1, Commutation Channel S2, Commutation Channel S3.
The question I have is: do I need to worry about torque ripple if I am providing the drives with only commutation pulses in this manner? If so, should I be outputting something else from LinuxCNC to the drives such as quadrature encoder pulses generated from the encoder signals?
Trying to avoid getting this all wired up and then having to change it.
I was thinking that I would use the encoder signals to generate commutation signals to output to the Ultra3000 drives. The drives have inputs for Commutation Channel S1, Commutation Channel S2, Commutation Channel S3.
The question I have is: do I need to worry about torque ripple if I am providing the drives with only commutation pulses in this manner? If so, should I be outputting something else from LinuxCNC to the drives such as quadrature encoder pulses generated from the encoder signals?
Trying to avoid getting this all wired up and then having to change it.
Please Log in or Create an account to join the conversation.
- bnet
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 5
20 Feb 2025 04:47 #322029
by bnet
Replied by bnet on topic Fanuc Serial Pulse Coders - Red cap servos, mesa 7i76e, how to?
My other option would be to output TTL incremental encoder pulses from LinuxCNC (is this conversion from absolute serial encoder data to TTL incremental possible?) out via the 7i84 into the Allen-Bradley Ultra3000s.. I'm starting to think that this is more of a failsafe path because its unclear if the drives will run motors on commutation signals alone. Here's a look at the manual pages regarding [standard] feedback into the Ultra3000s.
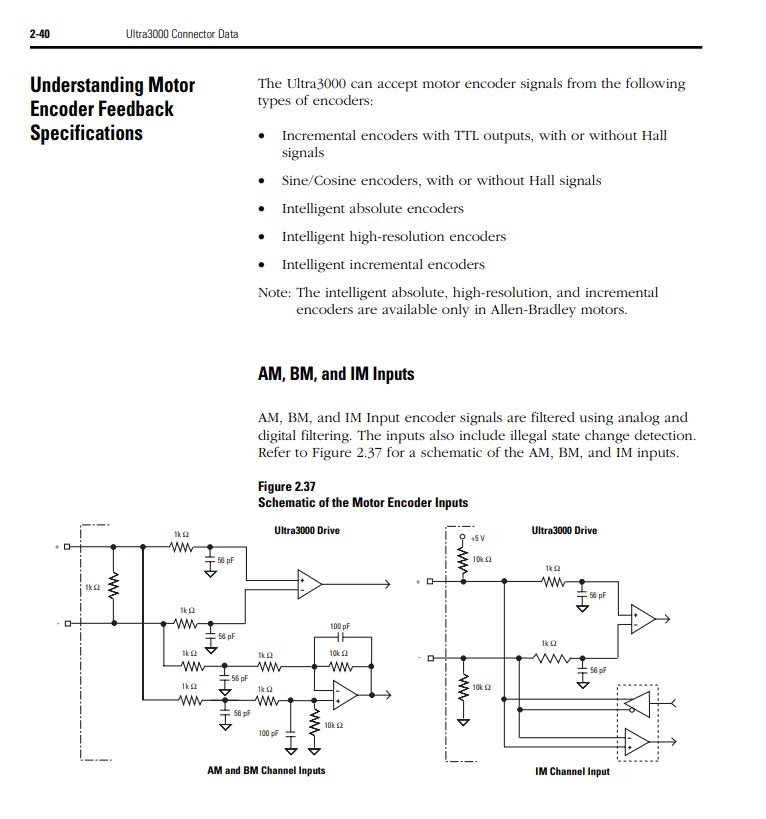
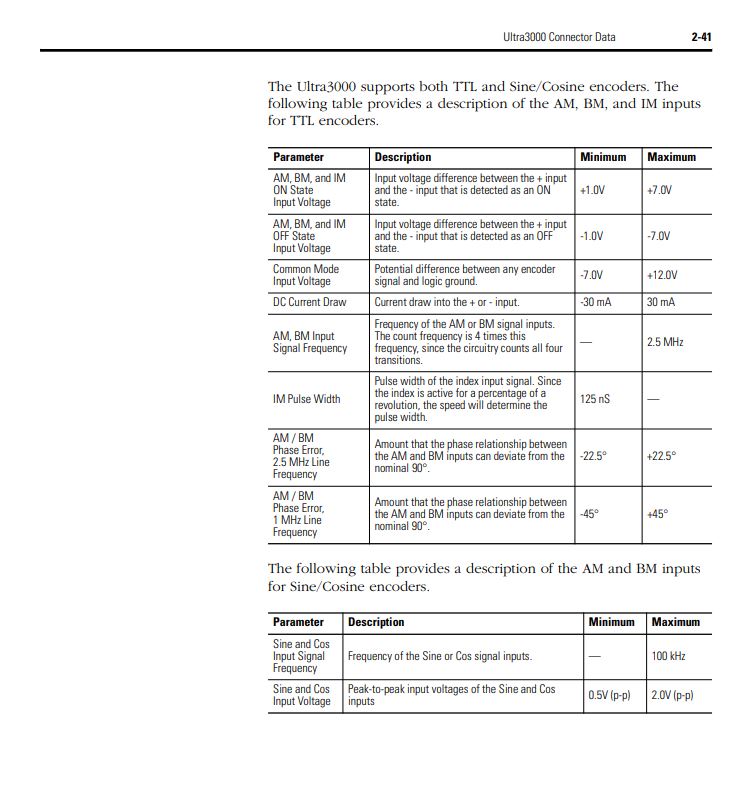
Thoughts and speculations welcomed and encouraged.
Thoughts and speculations welcomed and encouraged.
Attachments:
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 0.567 seconds