AC servo with 7i93 board
- Tavares
- Offline
- Junior Member
-

Less
More
- Posts: 27
- Thank you received: 0
03 Mar 2019 17:30 #127609
by Tavares
AC servo with 7i93 board was created by Tavares
Hello, I'm new to cnc, I'm building a machine and I already bought a 7i93 card. Now I am looking for chinese ac servo motor ... I would like to know if it is possible to directly control the motor with this board or need anything else.
I find these in aliexpress but I think they do the pid internally in the driver... or it is possible to do the pid in linuxcnc. connecting the encoder directly to the 7i93.
servo motor link:
ac servomotor link
or
ac servo motor 2
I find these in aliexpress but I think they do the pid internally in the driver... or it is possible to do the pid in linuxcnc. connecting the encoder directly to the 7i93.
servo motor link:
ac servomotor link
or
ac servo motor 2
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
03 Mar 2019 18:47 - 03 Mar 2019 18:48 #127620
by PCW
Replied by PCW on topic AC servo with 7i93 board
At least the first link shows that the drive has a step/dir interface and no position feedback to the controller (LinuxCNC in this case)
This type of drive would typically be run open-loop (no encoder feedback) from LinuxCNC
You can drive its opto-isolated step/dir inputs directly from the 7I93 but you have to be very careful that you do not exceed the I/O voltage/current limitations by:
1. Shorting 7I93 I/O pins to frame grounds (that may have as much as a couple volts difference from 7I93 power ground at high frequencies .
2. Shorting 7I93 pins to any external voltage exceeding their -0.5 to+7V range
To drive opto-coupler pins directly from the 7I93, you connect the + input to 5V
and the - input to the 7I93 output. This guarantees a full 5V drive signal.
This type of drive would typically be run open-loop (no encoder feedback) from LinuxCNC
You can drive its opto-isolated step/dir inputs directly from the 7I93 but you have to be very careful that you do not exceed the I/O voltage/current limitations by:
1. Shorting 7I93 I/O pins to frame grounds (that may have as much as a couple volts difference from 7I93 power ground at high frequencies .
2. Shorting 7I93 pins to any external voltage exceeding their -0.5 to+7V range
To drive opto-coupler pins directly from the 7I93, you connect the + input to 5V
and the - input to the 7I93 output. This guarantees a full 5V drive signal.
Last edit: 03 Mar 2019 18:48 by PCW. Reason: clarify
Please Log in or Create an account to join the conversation.
- bevins
-

- Offline
- Platinum Member
-

Less
More
- Posts: 1947
- Thank you received: 338
04 Mar 2019 10:04 - 04 Mar 2019 10:14 #127674
by bevins
Replied by bevins on topic AC servo with 7i93 board
I have used these servo/drive's from China.
They have an encoder output to take into linuxcnc for closing the loop. I have had this working on a 5i25/7i77 setup.
They come with the loop closed in the drive. You have to change the parameters in the drive to make this work. IT does work though as I have had it working on a friends machine. It also does velocity mode +-10v.
Good luck, once setup they are solid.
They have an encoder output to take into linuxcnc for closing the loop. I have had this working on a 5i25/7i77 setup.
They come with the loop closed in the drive. You have to change the parameters in the drive to make this work. IT does work though as I have had it working on a friends machine. It also does velocity mode +-10v.
Good luck, once setup they are solid.
Last edit: 04 Mar 2019 10:14 by bevins.
Please Log in or Create an account to join the conversation.
- Tavares
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 0
07 Mar 2019 19:24 #128018
by Tavares
Replied by Tavares on topic AC servo with 7i93 board
what do a i need to output analog signal from 7i93, need another board? what board?
I want to control AC servo drive in velocity mode!
I want to control AC servo drive in velocity mode!
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17994
- Thank you received: 5281
08 Mar 2019 00:50 #128047
by PCW
Replied by PCW on topic AC servo with 7i93 board
For a 7I93 analog daughtercards are 7I33TA (4 axis) or 7I48 (6 axis)
Please Log in or Create an account to join the conversation.
- Tavares
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 0
13 Mar 2019 19:47 #128541
by Tavares
Replied by Tavares on topic AC servo with 7i93 board
How are you guys!
I think I'll buy the kit 5i25 + 7i77
apparently it seems easier to setup!
I'm looking at the Delta's servo motors to buy.
Driver: ASD-B2-0721-B
AC Motor: ECMA-C20807ES
My question is, in speed mode, where the encoder would be connected
AC motor encoder >> 7i77
or
AC motor encoder >> Drive >> 7i77
since the drive emulates the encoder output.
I think I'll buy the kit 5i25 + 7i77
apparently it seems easier to setup!
I'm looking at the Delta's servo motors to buy.
Driver: ASD-B2-0721-B
AC Motor: ECMA-C20807ES
My question is, in speed mode, where the encoder would be connected
AC motor encoder >> 7i77
or
AC motor encoder >> Drive >> 7i77
since the drive emulates the encoder output.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21762
- Thank you received: 7436
14 Mar 2019 01:48 #128554
by tommylight
Replied by tommylight on topic AC servo with 7i93 board
You can do it both ways, but it is much more preferable the second way.AC motor encoder >> 7i77
or
AC motor encoder >> Drive >> 7i77
since the drive emulates the encoder output.
Please Log in or Create an account to join the conversation.
- Richard J Kinch
-

- Offline
- Senior Member
-

Less
More
- Posts: 61
- Thank you received: 4
17 Mar 2019 13:28 #128819
by Richard J Kinch
I am successfully using those AASD controllers and 80ST-M02430 / 110ST-M06030 motors, but through the parallel port and some "simple" level-shifting circuits, not the 7i93.
I can tell you that these motors are readily configurable for step/dir or quadrature position, analog speed, or analog torque control, so they should work directly with any of LinuxCNC's possible open/closed PID configurations, which includes torque mode with LinuxCNC closing the loop on feedback from the motor's position encoder. But the signals are 12VDC level to the AASD, except the encoder output which is 5V differential. The documentation is full of puzzles and mysteries about how these features work, but they do work.
Replied by Richard J Kinch on topic AC servo with 7i93 board
I find these in aliexpress but I think they do the pid internally in the driver... or it is possible to do the pid in linuxcnc. connecting the encoder directly to the 7i93.
I am successfully using those AASD controllers and 80ST-M02430 / 110ST-M06030 motors, but through the parallel port and some "simple" level-shifting circuits, not the 7i93.
I can tell you that these motors are readily configurable for step/dir or quadrature position, analog speed, or analog torque control, so they should work directly with any of LinuxCNC's possible open/closed PID configurations, which includes torque mode with LinuxCNC closing the loop on feedback from the motor's position encoder. But the signals are 12VDC level to the AASD, except the encoder output which is 5V differential. The documentation is full of puzzles and mysteries about how these features work, but they do work.
Please Log in or Create an account to join the conversation.
- Richard J Kinch
-
- Offline
- Senior Member
-
Less
More
- Posts: 61
- Thank you received: 4
17 Mar 2019 13:32 - 17 Mar 2019 13:37 #128820
by Richard J Kinch
The AASD servo drive does indeed provide the motor's quadrature position feedback as 5V differential signals on the DB-25 connector. This is at native 8000 steps/rev, and you can set software gearing to any smaller steps/rev you like. This is a near-perfect feature, once you figure out the Engrish documentation describing it as "molecules" (numerators in ratios).
Replied by Richard J Kinch on topic AC servo with 7i93 board
At least the first link shows that the drive has a step/dir interface and no position feedback to the controller (LinuxCNC in this case)
The AASD servo drive does indeed provide the motor's quadrature position feedback as 5V differential signals on the DB-25 connector. This is at native 8000 steps/rev, and you can set software gearing to any smaller steps/rev you like. This is a near-perfect feature, once you figure out the Engrish documentation describing it as "molecules" (numerators in ratios).
Last edit: 17 Mar 2019 13:37 by Richard J Kinch.
Please Log in or Create an account to join the conversation.
- Tavares
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 0
17 Mar 2019 18:16 #128839
by Tavares
Replied by Tavares on topic AC servo with 7i93 board
Tnx for the reply guys!
I'm thinking about the diameter of the ball screw. In the project I used ball screw of 16mm, I do not know if I need 20mm because it is a big machine 3000x2000.
Details
Mesa board: 7I77-5I25
Driver Ac Servo Driver: ASD-B2-0721-B (manufacturer Delta)
AC Motor: ECMA-C20807ES 750W Torque 2.39Nm, 3000 RPM - Encoder 17 Bits - Shaft 19mm (manufacturer Delta)
ball screw : 1605 (16mm )
Tubes 50x50x15
Iam thinking in change the ball screw to 2005 or 2010, what u guys think? I want fast and Strong
and without spending a lot of money.
Take a look at my projet
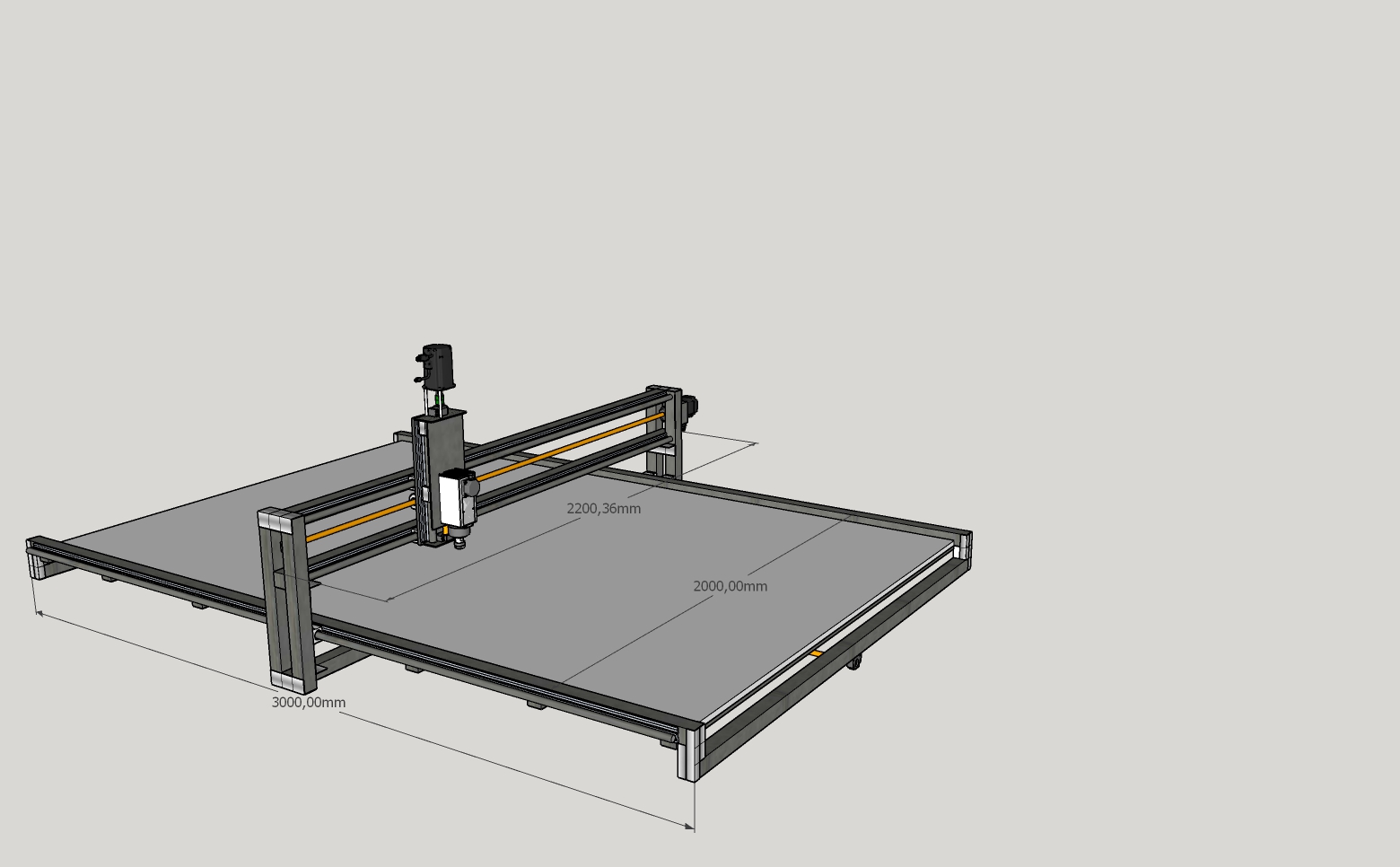
My CNC 3d-Sketchup File
I'm thinking about the diameter of the ball screw. In the project I used ball screw of 16mm, I do not know if I need 20mm because it is a big machine 3000x2000.
Details
Mesa board: 7I77-5I25
Driver Ac Servo Driver: ASD-B2-0721-B (manufacturer Delta)
AC Motor: ECMA-C20807ES 750W Torque 2.39Nm, 3000 RPM - Encoder 17 Bits - Shaft 19mm (manufacturer Delta)
ball screw : 1605 (16mm )
Tubes 50x50x15
Iam thinking in change the ball screw to 2005 or 2010, what u guys think? I want fast and Strong
and without spending a lot of money.
Take a look at my projet
My CNC 3d-Sketchup File
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.541 seconds