ipv6 error when starting LinuxCNC.
- piotr1991
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 0
17 Apr 2020 20:25 - 17 Apr 2020 20:32 #164322
by piotr1991
ipv6 error when starting LinuxCNC. was created by piotr1991
Hello to everybody.
This is my third day trying to sort out the damn ipv6 problem, which I never had before.It's appeared after a yesterdays LinuxCNC 2.9 update (using synaptic package manager). I've tried to disable ipv6 in /etc/sysctl with the following linesI've reinstalled everything, but it's still the same.
I've configured the wired connection as described here forum.linuxcnc.org/27-driver-boards/3559...ethernet-mesa-boards
I'm attaching the results of ip a command, and LinuCNC report log. Will be very thankful for any guidance where to look.
Sorry for my English. Hope to get a reply.
Thank you.
This is my third day trying to sort out the damn ipv6 problem, which I never had before.
sysctl: cannot stat /proc/sys/net/ipv6/conf/eth0:avahi/disable_ipv6: No such file or directorynet.ipv6.conf.all.disable_ipv6 = 1
net.ipv6.conf.default.disable_ipv6 = 1
net.ipv6.conf.lo.disable_ipv6 = 1I've configured the wired connection as described here forum.linuxcnc.org/27-driver-boards/3559...ethernet-mesa-boards
I'm attaching the results of ip a command, and LinuCNC report log. Will be very thankful for any guidance where to look.
Sorry for my English. Hope to get a reply.
Thank you.
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.9.0-pre0-1456-gdb3a15891
Machine configuration directory is '/home/piotr/linuxcnc/configs/711'
Machine configuration file is '711.ini'
INIFILE=/home/piotr/linuxcnc/configs/711/711.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TASK=d milltask
HALUI=halui
DISPLAY=axis
COORDINATES=XXYZ
KINEMATICS=trivkins coordinates=XXYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
Starting HAL User Interface program: halui
Found file(REL): ./711.hal
Found file(REL): ./custom.hal
Starting TASK program: d milltask
Can't execute TASK program d milltask
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
trivkins: coordinates:XXYZ
Joint 0 ==> Axis X
Joint 1 ==> Axis X
Joint 2 ==> Axis Y
Joint 3 ==> Axis Z
trivkins: Recommend: kinstype=both
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 10.10.10.11: Hardware address: 00:60:1b:14:00:35
hm2_eth: discovered 7I93
hm2/hm2_7i93.0: Low Level init 0.15
hm2/hm2_7i93.0: 48 I/O Pins used:
hm2/hm2_7i93.0: IO Pin 000 (P2-01): IOPort
hm2/hm2_7i93.0: IO Pin 001 (P2-03): IOPort
hm2/hm2_7i93.0: IO Pin 002 (P2-05): IOPort
hm2/hm2_7i93.0: IO Pin 003 (P2-07): IOPort
hm2/hm2_7i93.0: IO Pin 004 (P2-09): IOPort
hm2/hm2_7i93.0: IO Pin 005 (P2-11): IOPort
hm2/hm2_7i93.0: IO Pin 006 (P2-13): IOPort
hm2/hm2_7i93.0: IO Pin 007 (P2-15): IOPort
hm2/hm2_7i93.0: IO Pin 008 (P2-17): IOPort
hm2/hm2_7i93.0: IO Pin 009 (P2-19): IOPort
hm2/hm2_7i93.0: IO Pin 010 (P2-21): Encoder #0, pin A (Input)
hm2/hm2_7i93.0: IO Pin 011 (P2-23): Encoder #0, pin B (Input)
hm2/hm2_7i93.0: IO Pin 012 (P2-25): Encoder #1, pin A (Input)
hm2/hm2_7i93.0: IO Pin 013 (P2-27): Encoder #1, pin B (Input)
hm2/hm2_7i93.0: IO Pin 014 (P2-29): Encoder #2, pin A (Input)
hm2/hm2_7i93.0: IO Pin 015 (P2-31): Encoder #2, pin B (Input)
hm2/hm2_7i93.0: IO Pin 016 (P2-33): Encoder #3, pin A (Input)
hm2/hm2_7i93.0: IO Pin 017 (P2-35): Encoder #3, pin B (Input)
hm2/hm2_7i93.0: IO Pin 018 (P2-37): IOPort
hm2/hm2_7i93.0: IO Pin 019 (P2-39): IOPort
hm2/hm2_7i93.0: IO Pin 020 (P2-41): IOPort
hm2/hm2_7i93.0: IO Pin 021 (P2-43): IOPort
hm2/hm2_7i93.0: IO Pin 022 (P2-45): IOPort
hm2/hm2_7i93.0: IO Pin 023 (P2-47): IOPort
hm2/hm2_7i93.0: IO Pin 024 (P1-01): IOPort
hm2/hm2_7i93.0: IO Pin 025 (P1-03): IOPort
hm2/hm2_7i93.0: IO Pin 026 (P1-05): IOPort
hm2/hm2_7i93.0: IO Pin 027 (P1-07): IOPort
hm2/hm2_7i93.0: IO Pin 028 (P1-09): StepGen #0, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 029 (P1-11): StepGen #0, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 030 (P1-13): StepGen #1, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 031 (P1-15): StepGen #1, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 032 (P1-17): StepGen #2, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 033 (P1-19): StepGen #2, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 034 (P1-21): StepGen #3, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 035 (P1-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 036 (P1-25): IOPort
hm2/hm2_7i93.0: IO Pin 037 (P1-27): IOPort
hm2/hm2_7i93.0: IO Pin 038 (P1-29): IOPort
hm2/hm2_7i93.0: IO Pin 039 (P1-31): IOPort
hm2/hm2_7i93.0: IO Pin 040 (P1-33): PWMGen #0, pin Out0 (PWM or Up) (Output)
hm2/hm2_7i93.0: IO Pin 041 (P1-35): PWMGen #1, pin Out0 (PWM or Up) (Output)
hm2/hm2_7i93.0: IO Pin 042 (P1-37): IOPort
hm2/hm2_7i93.0: IO Pin 043 (P1-39): IOPort
hm2/hm2_7i93.0: IO Pin 044 (P1-41): IOPort
hm2/hm2_7i93.0: IO Pin 045 (P1-43): IOPort
hm2/hm2_7i93.0: IO Pin 046 (P1-45): IOPort
hm2/hm2_7i93.0: IO Pin 047 (P1-47): IOPort
hm2/hm2_7i93.0: registered
hm2_eth: ERROR: Failed to execute '/sbin/sysctl -q net.ipv6.conf.eth0:avahi.disable_ipv6=1'
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
sysctl: cannot stat /proc/sys/net/ipv6/conf/eth0:avahi/disable_ipv6: No such file or directory
1106
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
-----------------------------------------------------------------------
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
http://pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Fri 17 Apr 20:04:54 BST 2020
UTC Date: Fri 17 Apr 19:04:54 UTC 2020
this program: /usr/bin/linuxcnc_info
uptime: 20:04:54 up 16 min, 1 user, load average: 0.11, 0.03, 0.01
lsb_release -sa: Debian Debian GNU/Linux 9.12 (stretch) 9.12 stretch
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/piotr/linuxcnc/configs/711
USER: piotr
LOGNAME: piotr
HOME: /home/piotr
EDITOR:
VISUAL:
LANGUAGE: en_GB:en
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: lightdm-xsession
display size: 1024x768 pixels (270x203 millimeters)
PATH: /usr/bin:/home/piotr/linuxcnc/configs/711/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: debian
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.9.210-1 (2020-01-20)
machine -m: i686
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-4.9.0-12-rt-686-pae root=UUID=d1ddb21d-0a8d-4279-8230-4735018f882b ro quiet
model name: Intel(R) Celeron(R) CPU G3930 @ 2.90GHz
cores: 2
cpu MHz: 2367.578
parport:
serial:
Versions:
gcc: gcc (Debian 6.3.0-18+deb9u1) 6.3.0 20170516
python: Python 2.7.13
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.9.0-pre0-1456-gdb3a15891
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Desired=Unknown/Install/Remove/Purge/Hold
| Status=Not/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend
|/ Err?=(none)/Reinst-required (Status,Err: uppercase=bad)
||/ Name Version Architecture Description
+++-===============-============================-============-=====================================================================
un linuxcnc <none> <none> (no description available)
un linuxcnc-doc <none> <none> (no description available)
ii linuxcnc-doc-en 1:2.9.0~pre0.1456.gdb3a15891 all motion controller for CNC machines and robots (English documentation)
un linuxcnc-sim <none> <none> (no description available)
ii linuxcnc-uspace 1:2.9.0~pre0.1456.gdb3a15891 i386 motion controller for CNC machines and robots
piotr@debian:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
2: eth0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether e0:d5:5e:83:02:52 brd ff:ff:ff:ff:ff:ff
inet 169.254.5.189/16 brd 169.254.255.255 scope link eth0:avahi
valid_lft forever preferred_lft forever
Last edit: 17 Apr 2020 20:32 by piotr1991.
Please Log in or Create an account to join the conversation.
- PCW
-

- Online
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5283
17 Apr 2020 20:28 #164323
by PCW
Replied by PCW on topic ipv6 error when starting LinuxCNC.
Looks like you dont have your host static IP address set properly
Please Log in or Create an account to join the conversation.
- piotr1991
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 0
17 Apr 2020 20:36 #164325
by piotr1991
Replied by piotr1991 on topic ipv6 error when starting LinuxCNC.
Hello.
Can you advise what to look next, please? I've configured it as described here forum.linuxcnc.org/27-driver-boards/3559...ethernet-mesa-boards.
How I can check if the IP is static or not? Sorry for my newbie questions.
Can you advise what to look next, please? I've configured it as described here forum.linuxcnc.org/27-driver-boards/3559...ethernet-mesa-boards.
How I can check if the IP is static or not? Sorry for my newbie questions.
Please Log in or Create an account to join the conversation.
- PCW
-
- Online
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
17 Apr 2020 20:49 #164327
by PCW
Replied by PCW on topic ipv6 error when starting LinuxCNC.
Not sure how you configured it but the "ip a" list shows that you have not setup a
static IP address on the host
Here's what my "ip a" list looks like (for my Ethernet interface)
2: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether ec:b1:d7:6c:a2:da brd ff:ff:ff:ff:ff:ff
inet 10.10.10.100/8 brd 10.255.255.255 scope global eno1
valid_lft forever preferred_lft forever
Notice the "inet 10.10.10.100/8 brd 10.255.255.255 scope global eno1" line
That means the host Ethernet port (eno1 in my case) has been assigned a static
address of 10.10.10.100
Did you forget to set the static IP address in the net manager or not save your changes?
It may also be that you don't have the modified template in use
This is why I prefer to use the interfaces file rather than the network mangler (this is described in the hm2_eth manual page)
static IP address on the host
Here's what my "ip a" list looks like (for my Ethernet interface)
2: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether ec:b1:d7:6c:a2:da brd ff:ff:ff:ff:ff:ff
inet 10.10.10.100/8 brd 10.255.255.255 scope global eno1
valid_lft forever preferred_lft forever
Notice the "inet 10.10.10.100/8 brd 10.255.255.255 scope global eno1" line
That means the host Ethernet port (eno1 in my case) has been assigned a static
address of 10.10.10.100
Did you forget to set the static IP address in the net manager or not save your changes?
It may also be that you don't have the modified template in use
This is why I prefer to use the interfaces file rather than the network mangler (this is described in the hm2_eth manual page)
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
17 Apr 2020 22:25 #164348
by tommylight
Replied by tommylight on topic ipv6 error when starting LinuxCNC.
You have it set wrong in the network manager, you have it set at "LOCAL LINK", it should be set at " MANUAL"
Please Log in or Create an account to join the conversation.
- piotr1991
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 0
18 Apr 2020 15:01 - 18 Apr 2020 16:26 #164467
by piotr1991
Replied by piotr1991 on topic ipv6 error when starting LinuxCNC.
Hello.
I've ununstalled everything again and installed everything with the following sequence:
1)Clean install of LinuxCNC stretch ISO.
2)Removed LinuxCNC 2.7.14 using Synaptic package manager.
3)Sudo apt-get install dirmngr.
4)apt -key (something)
5)All updates using Synaptic package manager,and LinuxCNC 2.9
6)Reboot
7)Added /etc/network/interfaces with8)Reboot.
I have no errors about ipv6 now, but it's still don't want to start. I'm completely lost.My ip aMy hal config
I've ununstalled everything again and installed everything with the following sequence:
1)Clean install of LinuxCNC stretch ISO.
2)Removed LinuxCNC 2.7.14 using Synaptic package manager.
3)Sudo apt-get install dirmngr.
4)apt -key (something)
5)All updates using Synaptic package manager,and LinuxCNC 2.9
6)Reboot
7)Added /etc/network/interfaces with
auto eth0
iface eth0 inet static
address 192.168.1.1
hardware−irq−coalesce−rx−usecs 0I have no errors about ipv6 now, but it's still don't want to start. I'm completely lost.
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.9.0-pre0-1456-gdb3a15891
Machine configuration directory is '/home/piotr/linuxcnc/configs/711'
Machine configuration file is '711.ini'
INIFILE=/home/piotr/linuxcnc/configs/711/711.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TASK=d milltask
HALUI=halui
DISPLAY=axis
COORDINATES=XXYZ
KINEMATICS=trivkins coordinates=XXYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
Starting HAL User Interface program: halui
Found file(REL): ./711.hal
Found file(REL): ./custom.hal
Starting TASK program: d milltask
Can't execute TASK program d milltask
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
trivkins: coordinates:XXYZ
Joint 0 ==> Axis X
Joint 1 ==> Axis X
Joint 2 ==> Axis Y
Joint 3 ==> Axis Z
trivkins: Recommend: kinstype=both
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: Hardware address: 00:60:1b:14:00:35
hm2_eth: discovered 7I93
hm2/hm2_7i93.0: Low Level init 0.15
hm2/hm2_7i93.0: 48 I/O Pins used:
hm2/hm2_7i93.0: IO Pin 000 (P2-01): IOPort
hm2/hm2_7i93.0: IO Pin 001 (P2-03): IOPort
hm2/hm2_7i93.0: IO Pin 002 (P2-05): IOPort
hm2/hm2_7i93.0: IO Pin 003 (P2-07): IOPort
hm2/hm2_7i93.0: IO Pin 004 (P2-09): IOPort
hm2/hm2_7i93.0: IO Pin 005 (P2-11): IOPort
hm2/hm2_7i93.0: IO Pin 006 (P2-13): IOPort
hm2/hm2_7i93.0: IO Pin 007 (P2-15): IOPort
hm2/hm2_7i93.0: IO Pin 008 (P2-17): IOPort
hm2/hm2_7i93.0: IO Pin 009 (P2-19): IOPort
hm2/hm2_7i93.0: IO Pin 010 (P2-21): Encoder #0, pin A (Input)
hm2/hm2_7i93.0: IO Pin 011 (P2-23): Encoder #0, pin B (Input)
hm2/hm2_7i93.0: IO Pin 012 (P2-25): Encoder #1, pin A (Input)
hm2/hm2_7i93.0: IO Pin 013 (P2-27): Encoder #1, pin B (Input)
hm2/hm2_7i93.0: IO Pin 014 (P2-29): Encoder #2, pin A (Input)
hm2/hm2_7i93.0: IO Pin 015 (P2-31): Encoder #2, pin B (Input)
hm2/hm2_7i93.0: IO Pin 016 (P2-33): Encoder #3, pin A (Input)
hm2/hm2_7i93.0: IO Pin 017 (P2-35): Encoder #3, pin B (Input)
hm2/hm2_7i93.0: IO Pin 018 (P2-37): IOPort
hm2/hm2_7i93.0: IO Pin 019 (P2-39): IOPort
hm2/hm2_7i93.0: IO Pin 020 (P2-41): IOPort
hm2/hm2_7i93.0: IO Pin 021 (P2-43): IOPort
hm2/hm2_7i93.0: IO Pin 022 (P2-45): IOPort
hm2/hm2_7i93.0: IO Pin 023 (P2-47): IOPort
hm2/hm2_7i93.0: IO Pin 024 (P1-01): IOPort
hm2/hm2_7i93.0: IO Pin 025 (P1-03): IOPort
hm2/hm2_7i93.0: IO Pin 026 (P1-05): IOPort
hm2/hm2_7i93.0: IO Pin 027 (P1-07): IOPort
hm2/hm2_7i93.0: IO Pin 028 (P1-09): StepGen #0, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 029 (P1-11): StepGen #0, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 030 (P1-13): StepGen #1, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 031 (P1-15): StepGen #1, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 032 (P1-17): StepGen #2, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 033 (P1-19): StepGen #2, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 034 (P1-21): StepGen #3, pin Step (Output)
hm2/hm2_7i93.0: IO Pin 035 (P1-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i93.0: IO Pin 036 (P1-25): IOPort
hm2/hm2_7i93.0: IO Pin 037 (P1-27): IOPort
hm2/hm2_7i93.0: IO Pin 038 (P1-29): IOPort
hm2/hm2_7i93.0: IO Pin 039 (P1-31): IOPort
hm2/hm2_7i93.0: IO Pin 040 (P1-33): PWMGen #0, pin Out0 (PWM or Up) (Output)
hm2/hm2_7i93.0: IO Pin 041 (P1-35): PWMGen #1, pin Out0 (PWM or Up) (Output)
hm2/hm2_7i93.0: IO Pin 042 (P1-37): IOPort
hm2/hm2_7i93.0: IO Pin 043 (P1-39): IOPort
hm2/hm2_7i93.0: IO Pin 044 (P1-41): IOPort
hm2/hm2_7i93.0: IO Pin 045 (P1-43): IOPort
hm2/hm2_7i93.0: IO Pin 046 (P1-45): IOPort
hm2/hm2_7i93.0: IO Pin 047 (P1-47): IOPort
hm2/hm2_7i93.0: registered
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
922
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
-----------------------------------------------------------------------
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
http://pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Sat 18 Apr 15:46:39 BST 2020
UTC Date: Sat 18 Apr 14:46:39 UTC 2020
this program: /usr/bin/linuxcnc_info
uptime: 15:46:39 up 2 min, 1 user, load average: 0.07, 0.04, 0.01
lsb_release -sa: Debian Debian GNU/Linux 9.12 (stretch) 9.12 stretch
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/piotr/linuxcnc/configs/711
USER: piotr
LOGNAME: piotr
HOME: /home/piotr
EDITOR:
VISUAL:
LANGUAGE: en_GB:en
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: lightdm-xsession
display size: 1280x1024 pixels (338x270 millimeters)
PATH: /usr/bin:/home/piotr/linuxcnc/configs/711/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: debian
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.9.210-1 (2020-01-20)
machine -m: i686
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-4.9.0-12-rt-686-pae root=UUID=f4aa23cc-3eae-42b6-acd7-541c91976d31 ro quiet
model name: Intel(R) Celeron(R) CPU G3930 @ 2.90GHz
cores: 2
cpu MHz: 2387.579
parport:
serial:
Versions:
gcc: gcc (Debian 6.3.0-18+deb9u1) 6.3.0 20170516
python: Python 2.7.13
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.9.0-pre0-1456-gdb3a15891
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Desired=Unknown/Install/Remove/Purge/Hold
| Status=Not/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend
|/ Err?=(none)/Reinst-required (Status,Err: uppercase=bad)
||/ Name Version Architecture Description
+++-===============-============================-============-=====================================================================
un linuxcnc <none> <none> (no description available)
un linuxcnc-doc <none> <none> (no description available)
ii linuxcnc-doc-en 1:2.9.0~pre0.1456.gdb3a15891 all motion controller for CNC machines and robots (English documentation)
un linuxcnc-sim <none> <none> (no description available)
ii linuxcnc-uspace 1:2.9.0~pre0.1456.gdb3a15891 i386 motion controller for CNC machines and robots
piotr@debian:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc pfifo_fast state UP group default qlen 1000
link/ether e0:d5:5e:83:02:52 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.1/24 brd 192.168.1.255 scope global eth0
valid_lft forever preferred_lft forever# Generated by PNCconf at Sat Feb 22 17:03:12 2020
# Using LinuxCNC version: UNAVAILABLE
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=4 num_pwmgens=2 num_stepgens=4"
setp hm2_7i93.0.pwmgen.pwm_frequency 20000
setp hm2_7i93.0.pwmgen.pdm_frequency 6000000
setp hm2_7i93.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.x2,pid.y,pid.z,#pid.s
addf hm2_7i93.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.x2.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
#addf pid.s.do-pid-calcs servo-thread
addf hm2_7i93.0.write servo-thread
# external output signals
# --- MACHINE-IS-ENABLED ---
setp hm2_7i93.0.gpio.038.is_output true
net machine-is-enabled => hm2_7i93.0.gpio.038.out
#setp hm2_7i93.0.gpio.038.invert_output true
# --- COOLANT-FLOOD ---
setp hm2_7i93.0.gpio.039.is_output true
net coolant-flood => hm2_7i93.0.gpio.039.out
setp hm2_7i93.0.gpio.039.invert_output true
# --- COOLANT-MIST ---
setp hm2_7i93.0.gpio.042.is_output true
net coolant-mist => hm2_7i93.0.gpio.042.out
setp hm2_7i93.0.gpio.042.invert_output true
# --- SPINDLE-CW ---
setp hm2_7i93.0.gpio.046.is_output true
net spindle-cw => hm2_7i93.0.gpio.046.out
setp hm2_7i93.0.gpio.046.invert_output true
# --- SPINDLE-CCW ---
setp hm2_7i93.0.gpio.047.is_output true
net spindle-ccw => hm2_7i93.0.gpio.047.out
setp hm2_7i93.0.gpio.047.invert_output true
# --- SPINDLE-ENABLE ---
setp hm2_7i93.0.gpio.045.is_output true
net spindle-enable => hm2_7i93.0.gpio.045.out
setp hm2_7i93.0.gpio.045.invert_output true
# external input signals
# --- ESTOP-EXT ---
net estop-ext <= hm2_7i93.0.gpio.000.in_not
#net estop-ext <= hm2_7i93.0.gpio.021.in
#net estop-ext <= hm2_7i93.0.gpio.026.in
# --- PROBE-IN ---
net probe-in <= hm2_7i93.0.gpio.022.in_not
# --- HOME-X ---
net home-x <= hm2_7i93.0.gpio.001.in_not
# --- HOME-X2 ---
net home-x2 <= hm2_7i93.0.gpio.002.in_not
# --- HOME-Y ---
net home-y <= hm2_7i93.0.gpio.003.in_not
# --- HOME-Z ---
net home-z <= hm2_7i93.0.gpio.004.in_not
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i93.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i93.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i93.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i93.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i93.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i93.0.stepgen.00.step_type 0
setp hm2_7i93.0.stepgen.00.control-type 1
setp hm2_7i93.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i93.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
#setp hm2_7i93.0.stepgen.00.direction.invert_output true
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i93.0.stepgen.00.velocity-cmd
#net x-pos-fb <= hm2_7i93.0.stepgen.00.position-fb
net x-pos-fb <= hm2_7i93.0.encoder.00.position
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i93.0.stepgen.00.enable
# ---Encoder feedback signals/setup---
setp hm2_7i93.0.encoder.00.counter-mode 0
setp hm2_7i93.0.encoder.00.filter 1
setp hm2_7i93.0.encoder.00.index-invert 0
setp hm2_7i93.0.encoder.00.index-mask 0
setp hm2_7i93.0.encoder.00.index-mask-invert 0
setp hm2_7i93.0.encoder.00.scale [JOINT_0]ENCODER_SCALE
net x-pos-fb <= hm2_7i93.0.encoder.00.position
net x-vel-fb <= hm2_7i93.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> hm2_7i93.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i93.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net home-x => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# Tandem AXIS X2 JOINT 1
#*******************
setp pid.x2.Pgain [JOINT_1]P
setp pid.x2.Igain [JOINT_1]I
setp pid.x2.Dgain [JOINT_1]D
setp pid.x2.bias [JOINT_1]BIAS
setp pid.x2.FF0 [JOINT_1]FF0
setp pid.x2.FF1 [JOINT_1]FF1
setp pid.x2.FF2 [JOINT_1]FF2
setp pid.x2.deadband [JOINT_1]DEADBAND
setp pid.x2.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.x2.error-previous-target true
setp pid.x2.maxerror .0005
net x2-index-enable <=> pid.x2.index-enable
net x2-enable => pid.x2.enable
net x2-pos-cmd => pid.x2.command
net x2-pos-fb => pid.x2.feedback
net x2-output <= pid.x2.output
# Step Gen signals/setup for tandem axis
setp hm2_7i93.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i93.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i93.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i93.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i93.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i93.0.stepgen.01.step_type 0
setp hm2_7i93.0.stepgen.01.control-type 1
setp hm2_7i93.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i93.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
#setp hm2_7i93.0.stepgen.01.direction.invert_output true
# ---closedloop stepper signals---
net x2-pos-cmd <= joint.1.motor-pos-cmd
net x2-vel-cmd <= joint.1.vel-cmd
net x2-output <= hm2_7i93.0.stepgen.01.velocity-cmd
#net x2-pos-fb <= hm2_7i93.0.stepgen.01.position-fb
net x2-pos-fb <= hm2_7i93.0.encoder.01.position
net x2-pos-fb => joint.1.motor-pos-fb
net x2-enable <= joint.1.amp-enable-out
net x2-enable => hm2_7i93.0.stepgen.01.enable
# ---Encoder feedback signals/setup---
setp hm2_7i93.0.encoder.01.counter-mode 0
setp hm2_7i93.0.encoder.01.filter 1
setp hm2_7i93.0.encoder.01.index-invert 0
setp hm2_7i93.0.encoder.01.index-mask 0
setp hm2_7i93.0.encoder.01.index-mask-invert 0
setp hm2_7i93.0.encoder.01.scale [JOINT_1]ENCODER_SCALE
net x2-pos-fb <= hm2_7i93.0.encoder.01.position
net x2-vel-fb <= hm2_7i93.0.encoder.01.velocity
net x2-pos-fb => joint.1.motor-pos-fb
net x2-index-enable joint.1.index-enable <=> hm2_7i93.0.encoder.01.index-enable
net x2-pos-rawcounts <= hm2_7i93.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net home-x2 => joint.1.home-sw-in
net x2-neg-limit => joint.1.neg-lim-sw-in
net x2-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Y JOINT 2
#*******************
setp pid.y.Pgain [JOINT_2]P
setp pid.y.Igain [JOINT_2]I
setp pid.y.Dgain [JOINT_2]D
setp pid.y.bias [JOINT_2]BIAS
setp pid.y.FF0 [JOINT_2]FF0
setp pid.y.FF1 [JOINT_2]FF1
setp pid.y.FF2 [JOINT_2]FF2
setp pid.y.deadband [JOINT_2]DEADBAND
setp pid.y.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i93.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i93.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i93.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i93.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i93.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i93.0.stepgen.02.step_type 0
setp hm2_7i93.0.stepgen.02.control-type 1
setp hm2_7i93.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i93.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
#setp hm2_7i93.0.stepgen.02.direction.invert_output true
# ---closedloop stepper signals---
net y-pos-cmd <= joint.2.motor-pos-cmd
net y-vel-cmd <= joint.2.vel-cmd
net y-output <= hm2_7i93.0.stepgen.02.velocity-cmd
#net y-pos-fb <= hm2_7i93.0.stepgen.02.position-fb
net y-pos-fb <= hm2_7i93.0.encoder.02.position
net y-pos-fb => joint.2.motor-pos-fb
net y-enable <= joint.2.amp-enable-out
net y-enable => hm2_7i93.0.stepgen.02.enable
# ---Encoder feedback signals/setup---
setp hm2_7i93.0.encoder.02.counter-mode 0
setp hm2_7i93.0.encoder.02.filter 1
setp hm2_7i93.0.encoder.02.index-invert 0
setp hm2_7i93.0.encoder.02.index-mask 0
setp hm2_7i93.0.encoder.02.index-mask-invert 0
setp hm2_7i93.0.encoder.02.scale [JOINT_2]ENCODER_SCALE
net y-pos-fb <= hm2_7i93.0.encoder.02.position
net y-vel-fb <= hm2_7i93.0.encoder.02.velocity
net y-pos-fb => joint.2.motor-pos-fb
net y-index-enable joint.2.index-enable <=> hm2_7i93.0.encoder.02.index-enable
net y-pos-rawcounts <= hm2_7i93.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net home-y => joint.2.home-sw-in
net y-neg-limit => joint.2.neg-lim-sw-in
net y-pos-limit => joint.2.pos-lim-sw-in
#*******************
# AXIS Z JOINT 3
#*******************
setp pid.z.Pgain [JOINT_3]P
setp pid.z.Igain [JOINT_3]I
setp pid.z.Dgain [JOINT_3]D
setp pid.z.bias [JOINT_3]BIAS
setp pid.z.FF0 [JOINT_3]FF0
setp pid.z.FF1 [JOINT_3]FF1
setp pid.z.FF2 [JOINT_3]FF2
setp pid.z.deadband [JOINT_3]DEADBAND
setp pid.z.maxoutput [JOINT_3]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i93.0.stepgen.03.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i93.0.stepgen.03.dirhold [JOINT_3]DIRHOLD
setp hm2_7i93.0.stepgen.03.steplen [JOINT_3]STEPLEN
setp hm2_7i93.0.stepgen.03.stepspace [JOINT_3]STEPSPACE
setp hm2_7i93.0.stepgen.03.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i93.0.stepgen.03.step_type 0
setp hm2_7i93.0.stepgen.03.control-type 1
setp hm2_7i93.0.stepgen.03.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i93.0.stepgen.03.maxvel [JOINT_3]STEPGEN_MAXVEL
setp hm2_7i93.0.stepgen.03.direction.invert_output true
# ---closedloop stepper signals---
net z-pos-cmd <= joint.3.motor-pos-cmd
net z-vel-cmd <= joint.3.vel-cmd
net z-output <= hm2_7i93.0.stepgen.03.velocity-cmd
#net z-pos-fb <= hm2_7i93.0.stepgen.03.position-fb
net z-pos-fb <= hm2_7i93.0.encoder.03.position
net z-pos-fb => joint.3.motor-pos-fb
net z-enable <= joint.3.amp-enable-out
net z-enable => hm2_7i93.0.stepgen.03.enable
# ---Encoder feedback signals/setup---
setp hm2_7i93.0.encoder.03.counter-mode 0
setp hm2_7i93.0.encoder.03.filter 1
setp hm2_7i93.0.encoder.03.index-invert 0
setp hm2_7i93.0.encoder.03.index-mask 0
setp hm2_7i93.0.encoder.03.index-mask-invert 0
setp hm2_7i93.0.encoder.03.scale [JOINT_3]ENCODER_SCALE
net z-pos-fb <= hm2_7i93.0.encoder.03.position
net z-vel-fb <= hm2_7i93.0.encoder.03.velocity
net z-pos-fb => joint.3.motor-pos-fb
net z-index-enable joint.3.index-enable <=> hm2_7i93.0.encoder.03.index-enable
net z-pos-rawcounts <= hm2_7i93.0.encoder.03.rawcounts
# ---setup home / limit switch signals---
net home-z => joint.3.home-sw-in
net z-neg-limit => joint.3.neg-lim-sw-in
net z-pos-limit => joint.3.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
#setp pid.s.Pgain [SPINDLE_0]P
#setp pid.s.Igain [SPINDLE_0]I
#setp pid.s.Dgain [SPINDLE_0]D
#setp pid.s.bias [SPINDLE_0]BIAS
#setp pid.s.FF0 [SPINDLE_0]FF0
#setp pid.s.FF1 [SPINDLE_0]FF1
#setp pid.s.FF2 [SPINDLE_0]FF2
#setp pid.s.deadband [SPINDLE_0]DEADBAND
#setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
#setp pid.s.error-previous-target true
#net spindle-index-enable <=> pid.s.index-enable
#net spindle-enable => pid.s.enable
#net spindle-vel-cmd-rpm => pid.s.command
#net spindle-vel-fb-rpm => pid.s.feedback
#net spindle-output <= pid.s.output
# ---PWM Generator signals/setup---
setp hm2_7i93.0.pwmgen.00.output-type 1
setp hm2_7i93.0.pwmgen.00.scale [SPINDLE_0]OUTPUT_SCALE
net spindle-vel-cmd-rpm => hm2_7i93.0.pwmgen.00.value
net spindle-enable => hm2_7i93.0.pwmgen.00.enable
setp hm2_7i93.0.gpio.040.invert_output true
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Last edit: 18 Apr 2020 16:26 by piotr1991.
Please Log in or Create an account to join the conversation.
- PCW
-
- Online
- Moderator
-
Less
More
- Posts: 17996
- Thank you received: 5283
18 Apr 2020 16:32 #164474
by PCW
Replied by PCW on topic ipv6 error when starting LinuxCNC.
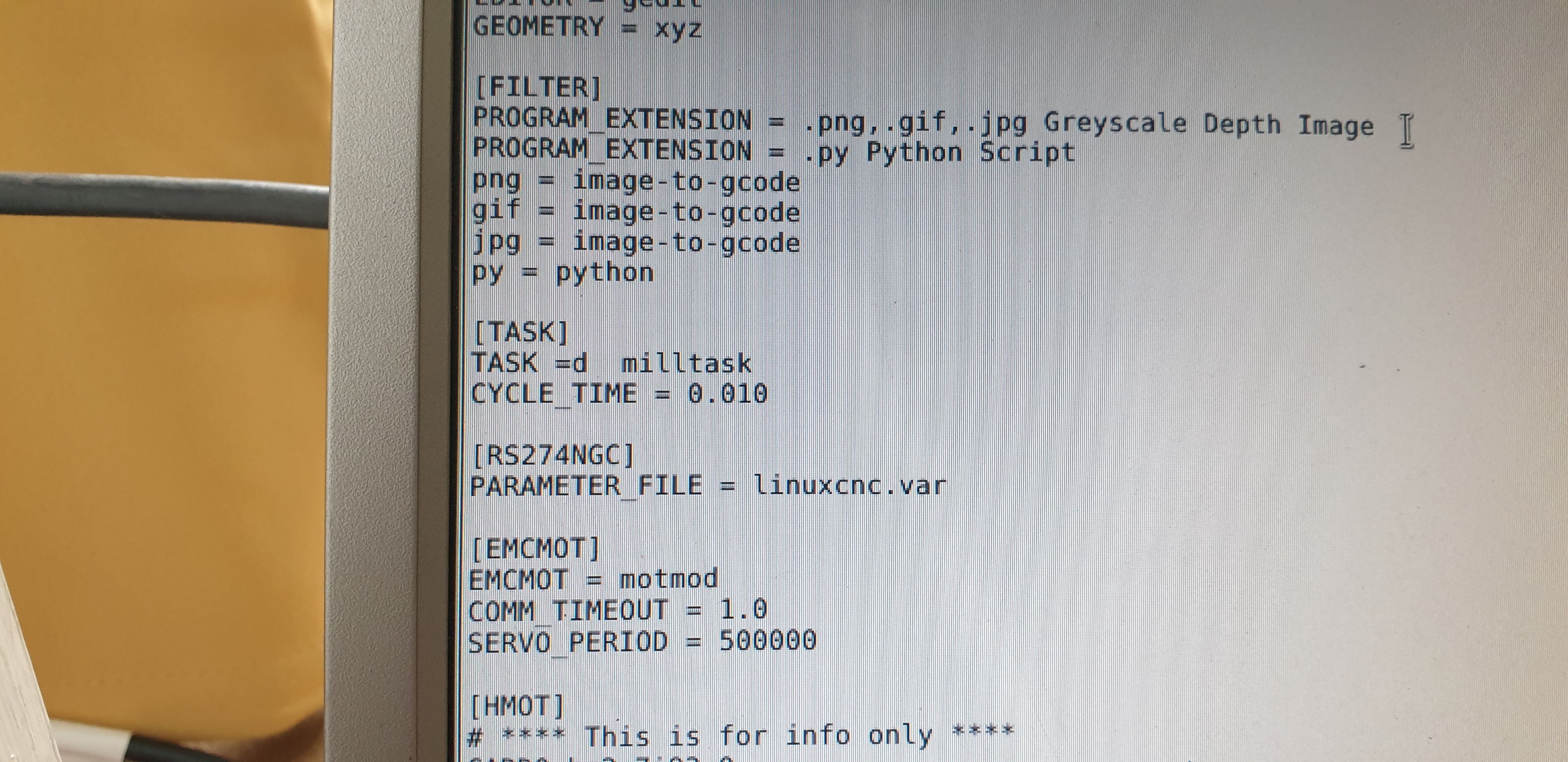
"Can't execute TASK program d milltask"
is weird
Possible corrupted hal/ini file? (edited with non ASCII editor?)
is weird
Possible corrupted hal/ini file? (edited with non ASCII editor?)
Please Log in or Create an account to join the conversation.
- piotr1991
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 0
18 Apr 2020 16:49 - 18 Apr 2020 17:30 #164476
by piotr1991
Replied by piotr1991 on topic ipv6 error when starting LinuxCNC.
I'm always using mousepad. Nothing else. When I've compared two ini files I found strange thing. In [TASK] section there was =d (on the picture). But when I removed letter "d" it's opened. I have no idea was this my accidental mistake or there was something else.
Attachments:
Last edit: 18 Apr 2020 17:30 by piotr1991.
Please Log in or Create an account to join the conversation.
Time to create page: 0.968 seconds