Retrofitting rotomat/screw machine
- Nikl
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 1
27 Jul 2020 00:39 #175996
by Nikl
Replied by Nikl on topic Retrofitting rotomat/screw machine
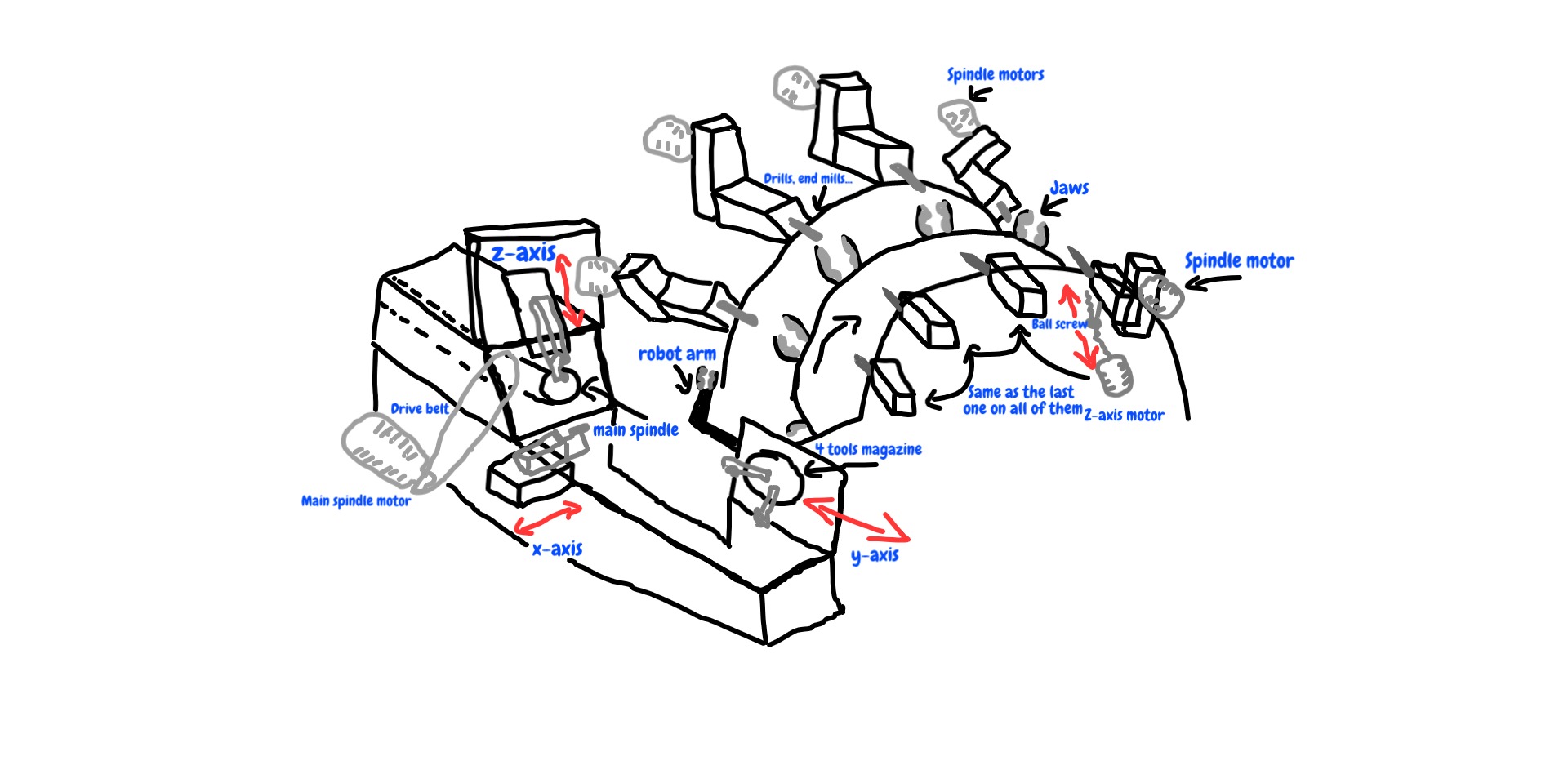
Hy. I have taken some time to draw the whole machine, its axes, and motors. I hope it will be understandable from the picture. Let's take the machine on two main parts. the first part is the main spindle and the 3 axes with which you could operate the first piece of the metal part. Then when it is done the robot arm moves that part on the rotating plate with jaws that rotate the part to the different spindles with different tools. The robot part is done with the plc. The second part is the spindles that have only one moving axis and one spindle. In the end, I think we will choose 8 of them, cause more will probably be unnecessary. I have changed my mind and i will not be using Spindles with VFD control and go all out with servos. So I need one servo for each spindle and each z-axis movement. So if we summit we need to control 16 servos for the second part. For the first part, we need 3 servos for three moving axes and one for the main spindle. I will need some outputs to sync the plc but there will not be a need for more than 3 or 4. There will obviously be a lot of inputs for all of the homing and some other stuff. Hope now it is all more understandable. If not I am happy to clarify anything else.
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21764
- Thank you received: 7438
28 Jul 2020 00:02 #176177
by tommylight
Replied by tommylight on topic Retrofitting rotomat/screw machine
I will have a closer look as soon as i can.
The following user(s) said Thank You: Nikl
Please Log in or Create an account to join the conversation.
- Nikl
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 1
28 Jul 2020 00:16 #176184
by Nikl
Replied by Nikl on topic Retrofitting rotomat/screw machine
We have come quite far, just that I can see that that is duable is very good.
Please Log in or Create an account to join the conversation.
Time to create page: 0.107 seconds