Mobile Robot System
- dhruv
- Offline
- New Member
-

Less
More
- Posts: 16
- Thank you received: 0
13 Jul 2021 05:44 #214488
by dhruv
Mobile Robot System was created by dhruv
Hii',
I'm making a mobile plasma cutting robot which will traverse on the surface of the workpiece which is placed on the ground on spacers (unlike over the surface in a traditional gantry system with the workpiece placed on a water bed).
This system is designed so because my workpiece is 15m x 3m in size.
The locomotion layout is as follows:
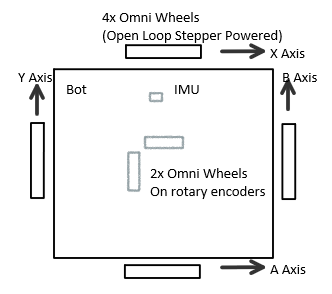
Here, I'm using 4 steppers for XY Locomotion and 2 perpendicular rotary encoders and an IMU for feedback. The 2 encoders are mounted separately on pivoted/spring loaded omni wheels so as to negate any slippage in the powered wheels and provide accurate feedback.
For the Z axis there will be another stepper and lead screw which will enable torch height control ability.
This is the first part of my project.
In the next part I intend to add a rotary degree of freedom to the end effector to enable bevel cutting of sheet metal.
I intend to use LinuxCNC for the project. This is my first experience with LinuxCNC and am just beginning to explore it. All advice on software, hardware as well as interfacing is most welcomed!
Thanks in advance for all guidance and advice!
I'm making a mobile plasma cutting robot which will traverse on the surface of the workpiece which is placed on the ground on spacers (unlike over the surface in a traditional gantry system with the workpiece placed on a water bed).
This system is designed so because my workpiece is 15m x 3m in size.
The locomotion layout is as follows:
Here, I'm using 4 steppers for XY Locomotion and 2 perpendicular rotary encoders and an IMU for feedback. The 2 encoders are mounted separately on pivoted/spring loaded omni wheels so as to negate any slippage in the powered wheels and provide accurate feedback.
For the Z axis there will be another stepper and lead screw which will enable torch height control ability.
This is the first part of my project.
In the next part I intend to add a rotary degree of freedom to the end effector to enable bevel cutting of sheet metal.
I intend to use LinuxCNC for the project. This is my first experience with LinuxCNC and am just beginning to explore it. All advice on software, hardware as well as interfacing is most welcomed!
Thanks in advance for all guidance and advice!
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4773
- Thank you received: 2140
13 Jul 2021 10:08 - 13 Jul 2021 10:11 #214525
by Aciera
One problem might be the limitation of the advanced trajectory planner to XYZ axis. As far as I know you will be limited to a one line look ahead.
The more general hurdle I see is how well your robot will move over cuts that have been made earlier in the program sequence.
[edit]
Really you would want to create a custom kinematic for this so the XY coordinates would be translated to the respective motors.
Replied by Aciera on topic Mobile Robot System
The more general hurdle I see is how well your robot will move over cuts that have been made earlier in the program sequence.
[edit]
Really you would want to create a custom kinematic for this so the XY coordinates would be translated to the respective motors.
Last edit: 13 Jul 2021 10:11 by Aciera.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21768
- Thank you received: 7440
13 Jul 2021 10:12 #214528
by tommylight
Replied by tommylight on topic Mobile Robot System
I have no idea what IMU is ...
LinuxCNC can do stppers with encoders, and from it's point of view this is a normal XYZ machine so it will work.
The mechanical issue of dragging encoders over a surface is a bit tricky as normal rubber wheels will drag always in one direction and jump and skip and pull on the encoder shaft. Maybe something like chair wheels could work but not sure how the encoder interpolation can be solved as each wheel would have 2 encoders.....
As for hardware, personally i use Mesa for everything and they have the best support on earth curtesy of PCW.
Pretty sure they have a Mesa 7i95 or similar that can control steppers and encoders and attaches to a PC over a single ethernet cable.
Another idea ( i did not say good) is mouse lasers are pretty damn accurate on any surface so maybe using something like that ....
LinuxCNC can do stppers with encoders, and from it's point of view this is a normal XYZ machine so it will work.
The mechanical issue of dragging encoders over a surface is a bit tricky as normal rubber wheels will drag always in one direction and jump and skip and pull on the encoder shaft. Maybe something like chair wheels could work but not sure how the encoder interpolation can be solved as each wheel would have 2 encoders.....
As for hardware, personally i use Mesa for everything and they have the best support on earth curtesy of PCW.
Pretty sure they have a Mesa 7i95 or similar that can control steppers and encoders and attaches to a PC over a single ethernet cable.
Another idea ( i did not say good) is mouse lasers are pretty damn accurate on any surface so maybe using something like that ....
Please Log in or Create an account to join the conversation.
- dhruv
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
13 Jul 2021 11:23 #214545
by dhruv
Replied by dhruv on topic Mobile Robot System
So IMU is an inertial measurement unit and will give us the heading angles (roll, pitch, yaw), velocity and acceleration.
Any idea on how to integrate this in our control loop? Is it possible to have a separate loop wherein the heading angle gives a separate signal to all the 4 steppers to move in a direction such that the bot makes a slight pure clockwise or counterclockwise corrective motion. (This is to ensure square movements of the bot.
As for the wheels,

These allow for active (powered) motion in the direction of rotation and free movement in the perpendicular direction by means of the lateral rollers.
As for the two external rotary encoders,

(Imagine a omni wheel here too) The pivoted spring loaded mounting enables the wheel to be always in contact with the surface.
Also, there are only two rotary encoders for the whole bot not two individually for each of the four motors. Two are supposed to be enough to provide the X and Y coordinate right?
Thanks!
Any idea on how to integrate this in our control loop? Is it possible to have a separate loop wherein the heading angle gives a separate signal to all the 4 steppers to move in a direction such that the bot makes a slight pure clockwise or counterclockwise corrective motion. (This is to ensure square movements of the bot.
As for the wheels,
These allow for active (powered) motion in the direction of rotation and free movement in the perpendicular direction by means of the lateral rollers.
As for the two external rotary encoders,
(Imagine a omni wheel here too) The pivoted spring loaded mounting enables the wheel to be always in contact with the surface.
Also, there are only two rotary encoders for the whole bot not two individually for each of the four motors. Two are supposed to be enough to provide the X and Y coordinate right?
Thanks!
Attachments:
Please Log in or Create an account to join the conversation.
- dhruv
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
13 Jul 2021 11:30 - 13 Jul 2021 11:30 #214547
by dhruv
Replied by dhruv on topic Mobile Robot System
Yes that's a valid concern but I don't have complex nested geometry to be cut. I just have simple large shapes. Also, please see #214545 just above for image references. The plan to put in external encoders with this specific kind of mounting is just to negate the effects of slippage and locomotion over the cuts
Last edit: 13 Jul 2021 11:30 by dhruv.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21768
- Thank you received: 7440
13 Jul 2021 11:38 #214550
by tommylight
Replied by tommylight on topic Mobile Robot System
If i had the time and money i would try that in a heartbeat, but currently i am out of both! ")
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4773
- Thank you received: 2140
13 Jul 2021 11:40 #214552
by Aciera
Replied by Aciera on topic Mobile Robot System
I don't understand why you would use the IMU and the encoders. How is roll and pitch going to be useful in an essentially 2D application.
Are you familiar with plasma cutting? I'm not but I imagine you will have a lot of sparks and dross flying around those encoder wheels on top of all the EMI. Another thing is the cable and hose you are going to be dragging around. So that robot will need to be rather heavy to get enough traction and moving all that weight around is going to make the whole thing rather slow.
Are you familiar with plasma cutting? I'm not but I imagine you will have a lot of sparks and dross flying around those encoder wheels on top of all the EMI. Another thing is the cable and hose you are going to be dragging around. So that robot will need to be rather heavy to get enough traction and moving all that weight around is going to make the whole thing rather slow.
The following user(s) said Thank You: tommylight, dhruv
Please Log in or Create an account to join the conversation.
- dhruv
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
13 Jul 2021 12:36 #214566
by dhruv
Replied by dhruv on topic Mobile Robot System
I was planning to use only the heading angle (yaw) from the IMU. (maybe the velocity and acceleration too but that's extra)
There's not a lot of sparks flying around (except when piercing) and the dross is at the bottom edge. There is a lot lot of EMI though. From what I know, high frequency noise is a problem but can be countered with proper shielding and grounding.
Regarding the cable and hose, I have a secondary system for that and that's sorted. The weight of the bot is also quite low and speed more than what's required (again a secondary system explaining which will only be confusing).
However I'm completely fine with using using an X and Y axis with A and B axis. For feedback, 2 rotary encoders mounted externally. Actually there's also the Z axis as well as a rotary degree of freedom in the XZ Plane (For making bevel cuts).
There's not a lot of sparks flying around (except when piercing) and the dross is at the bottom edge. There is a lot lot of EMI though. From what I know, high frequency noise is a problem but can be countered with proper shielding and grounding.
Regarding the cable and hose, I have a secondary system for that and that's sorted. The weight of the bot is also quite low and speed more than what's required (again a secondary system explaining which will only be confusing).
However I'm completely fine with using using an X and Y axis with A and B axis. For feedback, 2 rotary encoders mounted externally. Actually there's also the Z axis as well as a rotary degree of freedom in the XZ Plane (For making bevel cuts).
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4773
- Thank you received: 2140
13 Jul 2021 12:46 #214570
by Aciera
Replied by Aciera on topic Mobile Robot System
How are you planning on mapping the X and Y coordinates to the four wheels? Are you planning on using external software to produce the g-code required or are you planning on feeding regular XY g-code into linuxcnc?However I'm completely fine with using using an X and Y axis with A and B axis.
Please Log in or Create an account to join the conversation.
- dhruv
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
13 Jul 2021 12:56 #214574
by dhruv
Replied by dhruv on topic Mobile Robot System
I'm planning on feeding regular XY g-code into linuxcnc but I'm open to other possible solutions too
Please Log in or Create an account to join the conversation.
Time to create page: 0.484 seconds