- LinuxCNC
- General LinuxCNC Questions
- Stepper controlled servos doesnt move with Encoder feedback configured
Stepper controlled servos doesnt move with Encoder feedback configured
- Faggan
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

Less
More
- Posts: 28
- Thank you received: 1
14 Jun 2022 14:02 #245123
by Faggan
Replied by Faggan on topic Stepper controlled servos doesnt move with Encoder feedback configured
The encoders are 1048576 pulses per revolution default. (0.0003 degree resolution)
I have scaled them down to 65536 pulses per revolution. That gives me 0,000153mm resolution with 10mm per rev ball screws.
I have scaled them down to 65536 pulses per revolution. That gives me 0,000153mm resolution with 10mm per rev ball screws.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17917
- Thank you received: 5246
14 Jun 2022 14:04 - 14 Jun 2022 14:11 #245125
by PCW
Replied by PCW on topic Stepper controlled servos doesnt move with Encoder feedback configured
If the encoder and step scale are commensurate, FF1 must be 1.000
Plotting the encoder position might help as would posting the current hal/ini files
Plotting the encoder position might help as would posting the current hal/ini files
Last edit: 14 Jun 2022 14:11 by PCW.
Please Log in or Create an account to join the conversation.
- Faggan
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 28
- Thank you received: 1
14 Jun 2022 14:12 - 14 Jun 2022 14:13 #245126
by Faggan
Replied by Faggan on topic Stepper controlled servos doesnt move with Encoder feedback configured
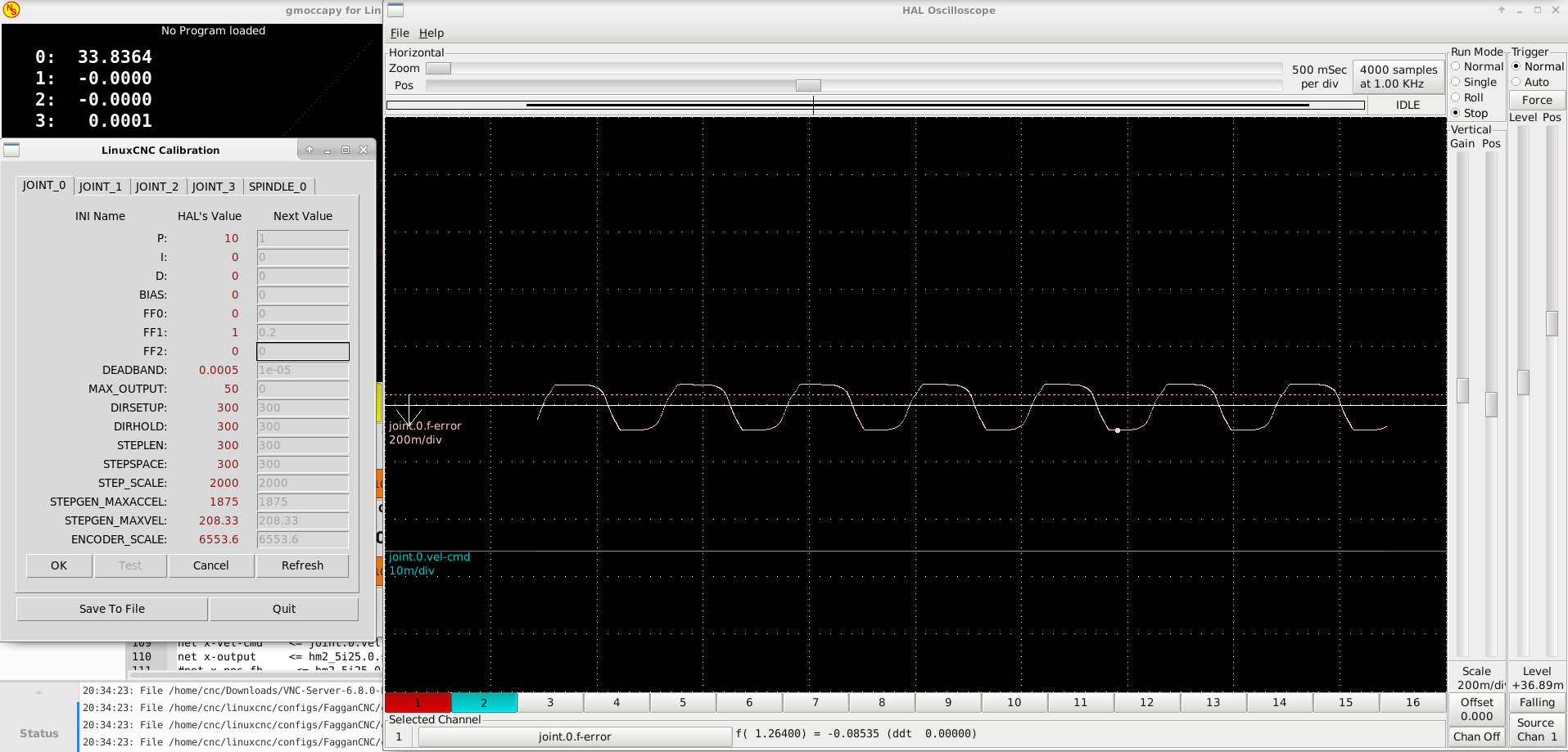
Yes, I have read that elsewhere too. I was testing other settings when I made the print screen. Same issue with FF1 at 1.000 though.
Here is a new print screen.
EDIT:
Hang on, i will get back with encoder position and current files.
Here is a new print screen.
EDIT:
Hang on, i will get back with encoder position and current files.
Attachments:
Last edit: 14 Jun 2022 14:13 by Faggan.
Please Log in or Create an account to join the conversation.
- Faggan
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 28
- Thank you received: 1
14 Jun 2022 14:22 #245127
by Faggan
Replied by Faggan on topic Stepper controlled servos doesnt move with Encoder feedback configured
Hal and ini attached.
This is with encoder position:
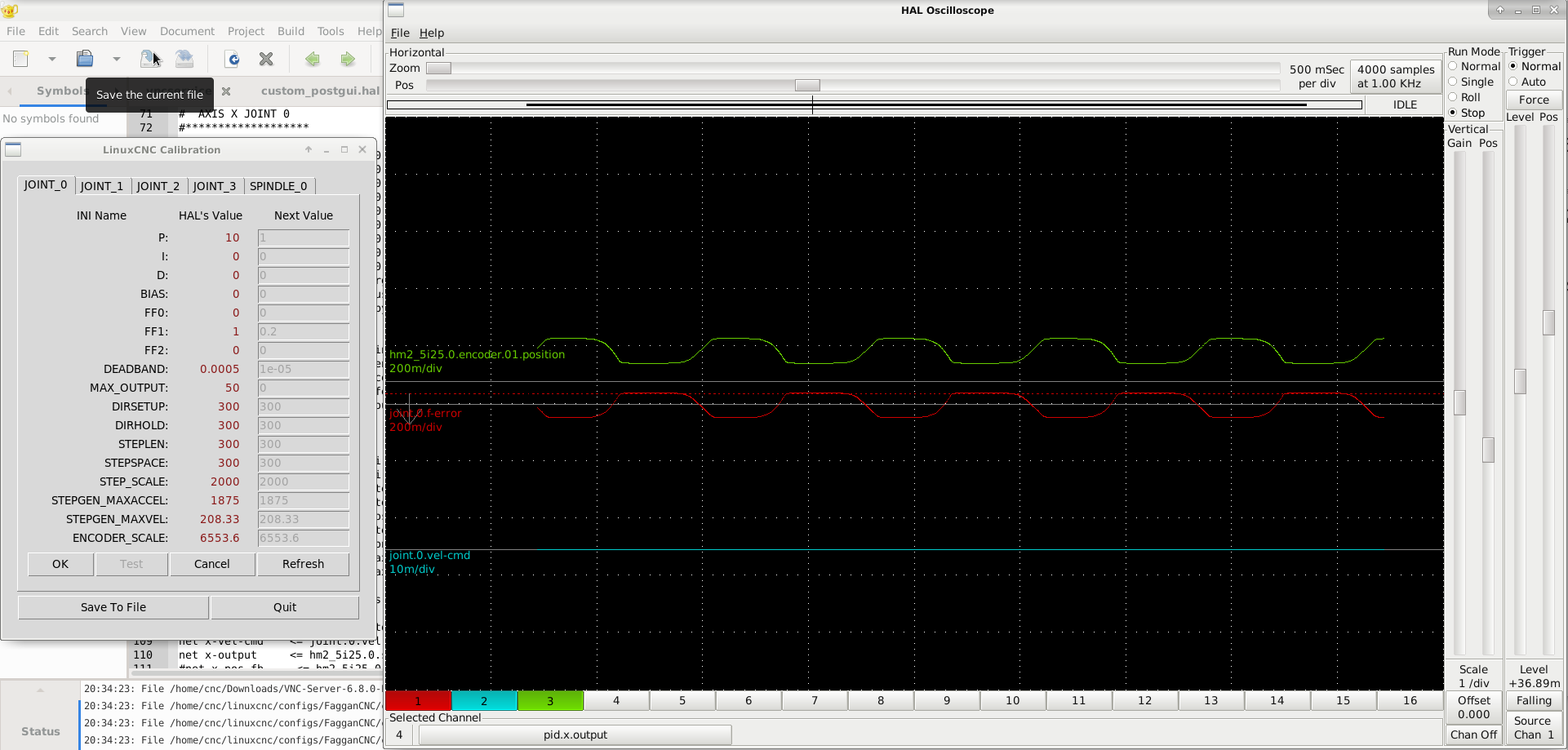
This is with encoder position:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17917
- Thank you received: 5246
14 Jun 2022 16:34 #245137
by PCW
Replied by PCW on topic Stepper controlled servos doesnt move with Encoder feedback configured
To get that kind of response I would think there must be a relatively large delay
from step command to encoder feedback, so this looks more and more
like a drive setup issue.
Are there any filters setup in the drives commanded position path?
Are there any velocity or acceleration constraints in the drive
lower than the stepgen constraints?
from step command to encoder feedback, so this looks more and more
like a drive setup issue.
Are there any filters setup in the drives commanded position path?
Are there any velocity or acceleration constraints in the drive
lower than the stepgen constraints?
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19861
- Thank you received: 4636
15 Jun 2022 20:54 #245227
by andypugh
Replied by andypugh on topic Stepper controlled servos doesnt move with Encoder feedback configured
If P = 1 is too high, then try P = 0.5....
I have seen P gains as high as 10,000 and as low as 0.003. It all depends on the system being controlled.
I have seen P gains as high as 10,000 and as low as 0.003. It all depends on the system being controlled.
Please Log in or Create an account to join the conversation.
- Faggan
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 28
- Thank you received: 1
16 Jun 2022 18:53 #245280
by Faggan
Replied by Faggan on topic Stepper controlled servos doesnt move with Encoder feedback configured
@PCW
You are correct. I had assumed that my servos and drives wouldn't need tuning because of a auto tune function they have. After a lot of reading manuals it turns out that the function only applies in speeds of 1000 rpm and higher (10 000mm/min for me). After some rough tuning of the X drive I have lowered the oscillation by a factor of 7. Looks like it will come into spec once I give it a bit more tuning.
Thank you so much for helping!
@andypugh
I have read that it varies greatly yes. What I don't understand fully is how a super low P value would work in practice. Lower P means slower response to errors in general. That leads us to strive for the largest stable P value if I understand correctly. But if you then have a very low value wouldn't the response be sluggish even if its stable? Or would other parameters like machine specs etc counter that?
Not really relevant to my problems, I am just trying to get a better grasp on things.
You are correct. I had assumed that my servos and drives wouldn't need tuning because of a auto tune function they have. After a lot of reading manuals it turns out that the function only applies in speeds of 1000 rpm and higher (10 000mm/min for me). After some rough tuning of the X drive I have lowered the oscillation by a factor of 7. Looks like it will come into spec once I give it a bit more tuning.
Thank you so much for helping!
@andypugh
I have read that it varies greatly yes. What I don't understand fully is how a super low P value would work in practice. Lower P means slower response to errors in general. That leads us to strive for the largest stable P value if I understand correctly. But if you then have a very low value wouldn't the response be sluggish even if its stable? Or would other parameters like machine specs etc counter that?
Not really relevant to my problems, I am just trying to get a better grasp on things.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19861
- Thank you received: 4636
17 Jun 2022 23:29 #245357
by andypugh
So if you are at 50,000 counts per second and want to be at 51,000 CPS that's a 0.1% change required in the output voltage, so a gain of 0.001 volts / count would be about right.
Replied by andypugh on topic Stepper controlled servos doesnt move with Encoder feedback configured
It depends on what the inputs and outputs are. One theoretical example might be a very high count encoder feeding back counts / second that is being controlled with a 0 to 10V analogue voltage for speed control.I have read that it varies greatly yes. What I don't understand fully is how a super low P value would work in practice.
So if you are at 50,000 counts per second and want to be at 51,000 CPS that's a 0.1% change required in the output voltage, so a gain of 0.001 volts / count would be about right.
Please Log in or Create an account to join the conversation.
- LinuxCNC
- General LinuxCNC Questions
- Stepper controlled servos doesnt move with Encoder feedback configured
Time to create page: 0.337 seconds