motor-0-position error beim Abbremsen aus 4-7,5 m/min
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17940
- Thank you received: 5255
27 Apr 2025 20:06 #327182
by PCW
Replied by PCW on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Actually, having a small amount of FF2 improves the following error
(the actual amount should be the time between reading the position and updating the output
though 0.005 seems large)
It may be necessary to take a look at the following error to diagnose the issue
(this will also allow for tuning of the FF2 value)
Increasing the following error limits should not hurt either
(the actual amount should be the time between reading the position and updating the output
though 0.005 seems large)
It may be necessary to take a look at the following error to diagnose the issue
(this will also allow for tuning of the FF2 value)
Increasing the following error limits should not hurt either
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-

Less
More
- Posts: 102
- Thank you received: 4
27 Apr 2025 21:02 #327185
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hi tommylight, i just followed the advice from PCW in an earlier posting: "...and change all joint PID "P" terms to 666"
OK, i will do that and also correct the stepgen max velocityto 160.
FF2 has been also an advive from PCW - I have Servos with integrated drivers, no feedback to the MEsa card.
"You might try plotting the following error and perhaps tuning by adding a little
FF2 (say .0003 to start) to the PID loop (using the calibrate menu so you can do this live) "
I'm just doing what I've been said to.
Thanks for your hints!
Greets Hanno
OK, i will do that and also correct the stepgen max velocityto 160.
FF2 has been also an advive from PCW - I have Servos with integrated drivers, no feedback to the MEsa card.
"You might try plotting the following error and perhaps tuning by adding a little
FF2 (say .0003 to start) to the PID loop (using the calibrate menu so you can do this live) "
I'm just doing what I've been said to.
Thanks for your hints!
Greets Hanno
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
27 Apr 2025 21:09 #327187
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hi PCW,
well I have had FF2 at 0,003 when the errors began and just tried 0,005, then 0,008, just not knowing what it does. I point out, that my servos (OMC 400W integrated drivers) do not send any feedback to the Mesa card, they have closed Loop Drivers/Encoders.
I can see the following error in the tuning software from OMC, but the numbers are not in any correlation to numbers in LCNC and INI file.
Is it better to leave FF2 at 0 or less than 0,003?
INcreasing FERROR = 0.1 or MIN_FERROR = 0.01? What could help more?
Thanks for your advice!
Greets, Hanno
well I have had FF2 at 0,003 when the errors began and just tried 0,005, then 0,008, just not knowing what it does. I point out, that my servos (OMC 400W integrated drivers) do not send any feedback to the Mesa card, they have closed Loop Drivers/Encoders.
I can see the following error in the tuning software from OMC, but the numbers are not in any correlation to numbers in LCNC and INI file.
Is it better to leave FF2 at 0 or less than 0,003?
INcreasing FERROR = 0.1 or MIN_FERROR = 0.01? What could help more?
Thanks for your advice!
Greets, Hanno
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11975
- Thank you received: 4079
27 Apr 2025 21:10 #327188
by rodw
Replied by rodw on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
I think you may have moved past this but the only network latency issue I can think of is that energy efficient Ethernet is enabled. This can cause intermittent latency spikes you are experiencing. The method to fix is different between Intel and Realtek device but I do mention them here
docs.google.com/document/d/1jeV_4VKzVmOI...diY/edit?usp=sharing
docs.google.com/document/d/1jeV_4VKzVmOI...diY/edit?usp=sharing
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21683
- Thank you received: 7405
27 Apr 2025 21:10 #327189
by tommylight
1 million = P 1000
2 million = P 500
0.5 million = P 2000
etc.
And sorry, i missed the part with FF2.
Replied by tommylight on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
That was correct back then when you had the servo period set at 1.5 million, it is not correct when you changed the period to 2 million.Hi tommylight, i just followed the advice from PCW in an earlier posting: "...and change all joint PID "P" terms to 666"
1 million = P 1000
2 million = P 500
0.5 million = P 2000
etc.
And sorry, i missed the part with FF2.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17940
- Thank you received: 5255
27 Apr 2025 21:12 #327190
by PCW
Replied by PCW on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Also setting FF2 should be done with halscope.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
27 Apr 2025 21:45 #327193
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hi rodw,
thank you, I have the DKMS r8168 driver installed weeks ago. I try this tomorrow:
Optional kernel settings (install using grub-customizer as per isolcpus setting)
r8168.aspm=0 r8168.eee_enable=0 pcie_aspm=off loglevel=3
I did not test them individually to see which helped but I suspect that disabling the "Energy Efficient Ethernet" mode might be a good culprit.
Ethernet efficiency mode has to be switched off in BIOS, right? OR is it in the network settings in Linux/Debian Network manager?
thank you, I have the DKMS r8168 driver installed weeks ago. I try this tomorrow:
Optional kernel settings (install using grub-customizer as per isolcpus setting)
r8168.aspm=0 r8168.eee_enable=0 pcie_aspm=off loglevel=3
I did not test them individually to see which helped but I suspect that disabling the "Energy Efficient Ethernet" mode might be a good culprit.
Ethernet efficiency mode has to be switched off in BIOS, right? OR is it in the network settings in Linux/Debian Network manager?
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
29 Apr 2025 10:40 - 29 Apr 2025 10:42 #327282
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hi, I tried a lot the last days.
I set the P to 500 as you said, I made the realtec optional kernel settings, i took a look for Energy efficiency and did not find anything of this, I set ff2 back to 0, and in the first try (an air run of my last part) it seemed to run - but 2 min after start the motor-0-position error came again, right in a direction change of the path. As before.
That was very disappointing, so I decided to get another PC from the shelf, a Lenovo m910q with 16GB, i7-6700T 4C/8T and put the SSD from the other in it.
The machine started at once, no problems to fix, I declined all BIOS settings that are described in the latency thread. This jounger PC has WLAN for the Internet and a I219-LM Intel network card, that should be better, somebody told me.
I did the coalescence workaround in etc/interfaces, I made the ethtool working (sudo ethtool -C enp0s31f6 rx-usecs 0), I made the kernel options: quiet irqaffinity=0,1 isolcpus=3 intel_idle.max_cstate=1 i915.enable_rc6=0
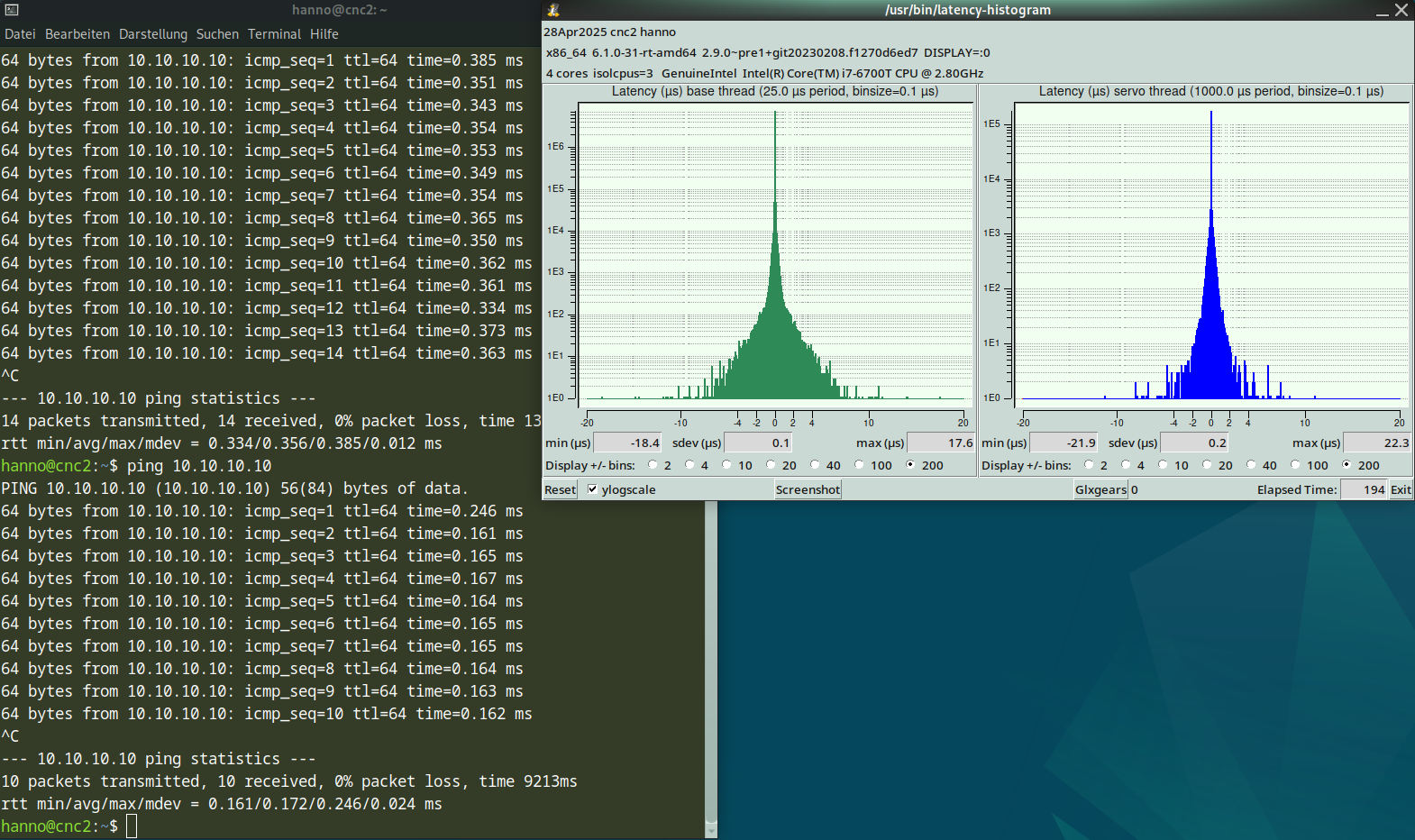
The outcome was not bad, but worse than before, regarding the ping times. The realtec gave me 0,056-0,070, the intel gives out:
rtt min/avg/max/mdev = 0.165/0.189/0.307/0.052 ms which is bad in my eyes.
Even if i kill the WLAN adapter, it does not much better:
111 packets transmitted, 111 received, 0% packet loss, time 112114ms
rtt min/avg/max/mdev = 0.108/0.164/0.199/0.011 ms
What do you think about it? should I go down to the machine and try it out or should I do sthing else?
Thanks for your advice, I appreciate that much!
Hanno
I set the P to 500 as you said, I made the realtec optional kernel settings, i took a look for Energy efficiency and did not find anything of this, I set ff2 back to 0, and in the first try (an air run of my last part) it seemed to run - but 2 min after start the motor-0-position error came again, right in a direction change of the path. As before.
That was very disappointing, so I decided to get another PC from the shelf, a Lenovo m910q with 16GB, i7-6700T 4C/8T and put the SSD from the other in it.
The machine started at once, no problems to fix, I declined all BIOS settings that are described in the latency thread. This jounger PC has WLAN for the Internet and a I219-LM Intel network card, that should be better, somebody told me.
I did the coalescence workaround in etc/interfaces, I made the ethtool working (sudo ethtool -C enp0s31f6 rx-usecs 0), I made the kernel options: quiet irqaffinity=0,1 isolcpus=3 intel_idle.max_cstate=1 i915.enable_rc6=0
The outcome was not bad, but worse than before, regarding the ping times. The realtec gave me 0,056-0,070, the intel gives out:
rtt min/avg/max/mdev = 0.165/0.189/0.307/0.052 ms which is bad in my eyes.
Even if i kill the WLAN adapter, it does not much better:
111 packets transmitted, 111 received, 0% packet loss, time 112114ms
rtt min/avg/max/mdev = 0.108/0.164/0.199/0.011 ms
What do you think about it? should I go down to the machine and try it out or should I do sthing else?
Thanks for your advice, I appreciate that much!
Hanno
Attachments:
Last edit: 29 Apr 2025 10:42 by Muftijaja.
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
29 Apr 2025 11:02 - 29 Apr 2025 12:11 #327283
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
This is my last effort to get the ping down. I set the Cool Option to thermally optimized, a cool&quiet option in BIOS. Other settings would bee acoustic optimized or full throttle. I hope it does not affect anything of cpu clocks.
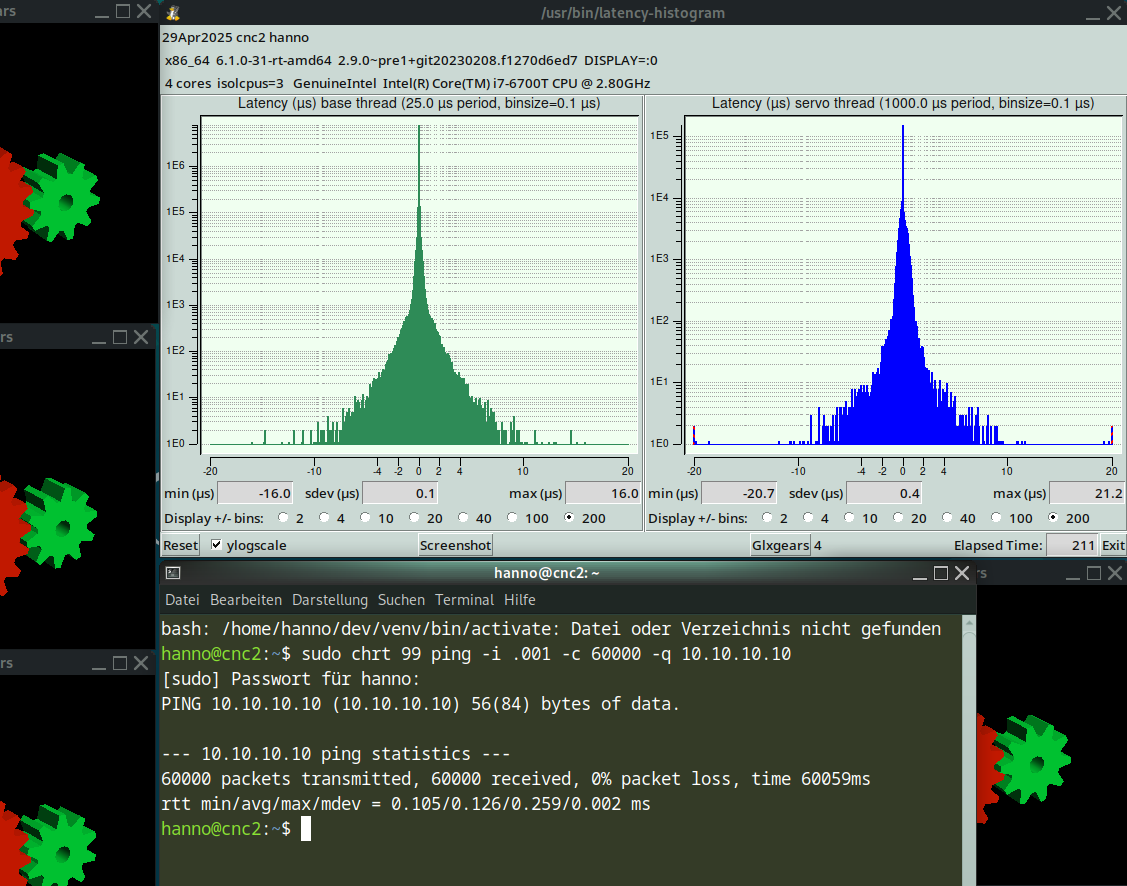
rtt min/avg/max/mdev = 0.105/0.126/0.259/0.002 ms what do you think?
Greetings, Hanno
rtt min/avg/max/mdev = 0.105/0.126/0.259/0.002 ms what do you think?
Greetings, Hanno
Attachments:
Last edit: 29 Apr 2025 12:11 by Muftijaja.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17940
- Thank you received: 5255
29 Apr 2025 15:06 #327297
by PCW
Replied by PCW on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
The ping times are not terribly important _unless_ packets are dropped due to timeouts.
Default timeout setting is 80% of the servo period so those times look fine for a 1 KHz
servo thread.
Default timeout setting is 80% of the servo period so those times look fine for a 1 KHz
servo thread.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.167 seconds