Glasmaßstab EIA-422 an Mesa 7i85 (S)
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21738
- Thank you received: 7429
13 Aug 2025 12:42 #333330
by tommylight
Asking for new firmware and having it in use in a single day, that is ultimate support.
Replied by tommylight on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
The internet uses G.O.A.T for "Greatest of All Times", and this is where it absolutely makes sense as PCW is the Greatest of All Times for support of it's products.By the way, I've always wanted to ask you, what's with the goat in the picture?
Asking for new firmware and having it in use in a single day, that is ultimate support.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17989
- Thank you received: 5281
13 Aug 2025 18:25 #333357
by PCW
Replied by PCW on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
Not a goat but rather one of our Blackbelly sheep.
Please Log in or Create an account to join the conversation.
- WKS-3D
-

- Offline
- Premium Member
-

Less
More
- Posts: 114
- Thank you received: 16
09 Sep 2025 15:21 #334712
by WKS-3D
Replied by WKS-3D on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
@PCW
Sorry for only getting back to you now, but I've only just had a chance to try it out.
When I insert this:
setp hm2_7192.0.encoder.00.index-enable true
and comment out this:
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
I get an error message when starting LinuxCNC.
The complete section for the X-axis looks like this:
What's wrong?
Sorry for only getting back to you now, but I've only just had a chance to try it out.
When I insert this:
setp hm2_7192.0.encoder.00.index-enable true
and comment out this:
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
I get an error message when starting LinuxCNC.
The complete section for the X-axis looks like this:
# Verwendete LinuxCNC version: Master (2.9)
# Mesa 7i76 LAUFT IN MODE 1 MIT 4 ANALOGEN EINGANGEN (sserial_port_0=1000000x) !!!!!!
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT unlock_joints_mask=0x8 servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS num_dio=6 num_aio=3
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config="num_encoders=5 num_pwmgens=0 num_stepgens=5 sserial_port_0=1000000x"
loadrt flipflop count=2
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.z
loadrt debounce cfg=8,1
setp debounce.0.delay 1
addf debounce.0 servo-thread
setp debounce.1.delay 1
addf debounce.1 servo-thread
addf flipflop.0 servo-thread
addf flipflop.1 servo-thread
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
#addf pid.s.do-pid-calcs servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
setp hm2_7i92.0.stepgen.timer-number 1
# --- Pinole Input Signale ---
net taster-pinole-minus <= hm2_7i92.0.7i76.0.0.input-25
net taster-pinole-plus <= hm2_7i92.0.7i76.0.0.input-24
# Set flipflops
net taster-pinole-minus => flipflop.0.set
net taster-pinole-plus => flipflop.1.set
net buf_taster-pinole-minus <= flipflop.0.out => hm2_7i92.0.7i76.0.0.output-01
net buf_taster-pinole-plus <= flipflop.1.out => flipflop.0.reset => flipflop.1.reset
# --- Werkzeug-Revolver loesen-spannen ---
net revolver-unlock joint.3.unlock => hm2_7i92.0.7i76.0.0.output-00
net revolver-is-unlocked joint.3.is-unlocked <= hm2_7i92.0.7i76.0.0.input-09
net joint.3.is-locked motion.digital-in-00 <= hm2_7i92.0.7i76.0.0.input-15
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Schritt-Gen Signale/Setup
setp hm2_7i92.0.stepgen.01.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i92.0.stepgen.01.dirhold [JOINT_0]DIRHOLD
setp hm2_7i92.0.stepgen.01.steplen [JOINT_0]STEPLEN
setp hm2_7i92.0.stepgen.01.stepspace [JOINT_0]STEPSPACE
setp hm2_7i92.0.stepgen.01.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i92.0.stepgen.01.step_type 0
setp hm2_7i92.0.stepgen.01.control-type 1
setp hm2_7i92.0.stepgen.01.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.01.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---Closed-Loop Schrittmotor-Signale---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => hm2_7i92.0.stepgen.01.velocity-cmd
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i92.0.stepgen.01.enable
# ---Einrichtung Referenzfahrt X-ACHSE / Signal des Endschalters---
#(--- Hier nur normaler positiv Endschalter und Home-Switch ---)
net x-home-sw hm2_7i92.0.7i76.0.0.input-06-not => joint.0.home-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
# --- Mit Glasmassstab ---
#net x-pos debounce.0.0.in <= hm2_7i92.0.7i76.0.0.input-06-not
#net x-pos-limit debounce.0.0.out
#net x-pos-limit => joint.0.pos-lim-sw-in joint.0.home-sw-in
# ---Encoder Feedback Signals/Setup
setp hm2_7i92.0.encoder.00.counter-mode 0
setp hm2_7i92.0.encoder.00.filter 0
setp hm2_7i92.0.encoder.00.index-invert 0
setp hm2_7i92.0.encoder.00.index-mask 0
setp hm2_7i92.0.encoder.00.index-mask-invert 1
setp hm2_7i92.0.encoder.00.scale [JOINT_0]ENCODER_SCALE
setp hm2_7192.0.encoder.00.index-enable true
# ---Indexsignal GMS fuer Referenzpunkt X (NICHT MIT NORMALEM ENDSCHALTER)
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcountsWhat's wrong?
Please Log in or Create an account to join the conversation.
- WKS-3D
-
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 16
13 Sep 2025 12:03 #334917
by WKS-3D
Replied by WKS-3D on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
Sind noch alle im Urlaub?
So ruhig geworden hier

So ruhig geworden hier
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
13 Sep 2025 12:13 - 13 Sep 2025 12:13 #334918
by Hakan
Replied by Hakan on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
We would like to see the error you get.
Nevertheless, I happen to know why. It's because index-enable is an IO pin, it's both input and output, a bit special.
So you can not set it to true, only connect it to a pin that is IO both input and output. Such as joint..index-enable
Relevant links www.linuxcnc.org/docs/html/drivers/hostmot2.html#_pins_5
linuxcnc.org/docs/html/man/man9/motion.9.html#JOINT%20PINS
Nevertheless, I happen to know why. It's because index-enable is an IO pin, it's both input and output, a bit special.
So you can not set it to true, only connect it to a pin that is IO both input and output. Such as joint..index-enable
Relevant links www.linuxcnc.org/docs/html/drivers/hostmot2.html#_pins_5
linuxcnc.org/docs/html/man/man9/motion.9.html#JOINT%20PINS
Last edit: 13 Sep 2025 12:13 by Hakan.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17989
- Thank you received: 5281
13 Sep 2025 13:58 - 13 Sep 2025 14:08 #334924
by PCW
Replied by PCW on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
Actually you can:
setp hm2_7192.0.encoder.00.index-enable true
As long as hm2_7192.0.encoder.00.index-enable is not connected to
a signal in the hal fiie. It will be set true once at LinuxCNC startup.
The error you have is that you did not comment out the net command connecting
hm2_7192.0.encoder.00.index-enable to the signal x-index-enable:
# ---Indexsignal GMS fuer Referenzpunkt X (NICHT MIT NORMALEM ENDSCHALTER)
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcounts
But for testing it's better to do this in halshow
Note that while you cannot change hm2_7192.0.encoder.00.index-enable
in halshow (or the hal file) if it's connected to a signal, you can
change the signal ( x-index-enable) in halshow for testing.
setp hm2_7192.0.encoder.00.index-enable true
As long as hm2_7192.0.encoder.00.index-enable is not connected to
a signal in the hal fiie. It will be set true once at LinuxCNC startup.
The error you have is that you did not comment out the net command connecting
hm2_7192.0.encoder.00.index-enable to the signal x-index-enable:
# ---Indexsignal GMS fuer Referenzpunkt X (NICHT MIT NORMALEM ENDSCHALTER)
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcounts
But for testing it's better to do this in halshow
Note that while you cannot change hm2_7192.0.encoder.00.index-enable
in halshow (or the hal file) if it's connected to a signal, you can
change the signal ( x-index-enable) in halshow for testing.
Last edit: 13 Sep 2025 14:08 by PCW.
Please Log in or Create an account to join the conversation.
- WKS-3D
-
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 16
14 Sep 2025 07:25 #334965
by WKS-3D
Replied by WKS-3D on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
That's what I did:
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
but it doesn't work
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
but it doesn't work
Please Log in or Create an account to join the conversation.
- WKS-3D
-
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 16
14 Sep 2025 07:48 #334968
by WKS-3D
Replied by WKS-3D on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
I changed it as follows:
# ---Encoder Feedback Signals/Setup
setp hm2_7i92.0.encoder.00.counter-mode 0
setp hm2_7i92.0.encoder.00.filter 1
setp hm2_7i92.0.encoder.00.index-invert 0 # war 0
setp hm2_7i92.0.encoder.00.index-mask 0
setp hm2_7i92.0.encoder.00.index-mask-invert 1 # war 1
setp hm2_7i92.0.encoder.00.scale [JOINT_0]ENCODER_SCALE
setp hm2_7192.0.encoder.00.index-enable true
# ---Indexsignal GMS fuer Referenzpunkt X (NICHT MIT NORMALEM ENDSCHALTER)
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
#net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcounts
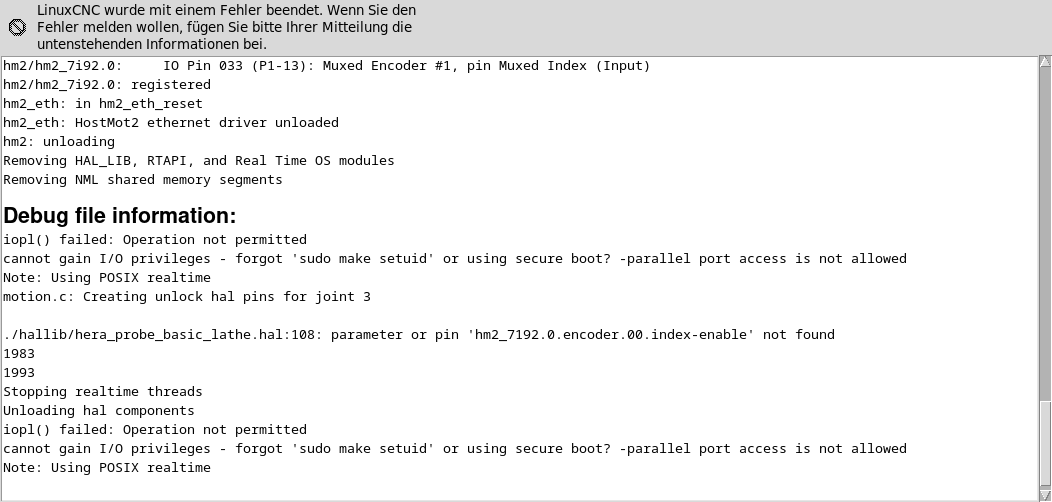
but I get this error message:
# ---Encoder Feedback Signals/Setup
setp hm2_7i92.0.encoder.00.counter-mode 0
setp hm2_7i92.0.encoder.00.filter 1
setp hm2_7i92.0.encoder.00.index-invert 0 # war 0
setp hm2_7i92.0.encoder.00.index-mask 0
setp hm2_7i92.0.encoder.00.index-mask-invert 1 # war 1
setp hm2_7i92.0.encoder.00.scale [JOINT_0]ENCODER_SCALE
setp hm2_7192.0.encoder.00.index-enable true
# ---Indexsignal GMS fuer Referenzpunkt X (NICHT MIT NORMALEM ENDSCHALTER)
net x-pos-fb <= hm2_7i92.0.encoder.00.position
net x-vel-fb <= hm2_7i92.0.encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
#net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_7i92.0.encoder.00.rawcounts
but I get this error message:
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17989
- Thank you received: 5281
15 Sep 2025 03:16 #335004
by PCW
Replied by PCW on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
Not sure what that issue is, the "cannot gain I/O privileges" is not related to index at all
Please Log in or Create an account to join the conversation.
- WKS-3D
-
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 16
15 Sep 2025 10:56 - 15 Sep 2025 11:02 #335014
by WKS-3D
Replied by WKS-3D on topic Glasmaßstab EIA-422 an Mesa 7i85 (S)
I tried a few more things and just couldn't get anywhere. So I decided to take another look at the wiring and the 7i85. I noticed that the jumpers for the signal are not set to RS-422 (in the down position) but to the up position for TTL signal.
Unfortunately, the nine-pin TTL signal pin assignment is the same as the RS-422 assignment, except that A-, B-, and R- are omitted. The signals are then ignored anyway. So there's probably no point in changing the jumpers.
Or should I try?
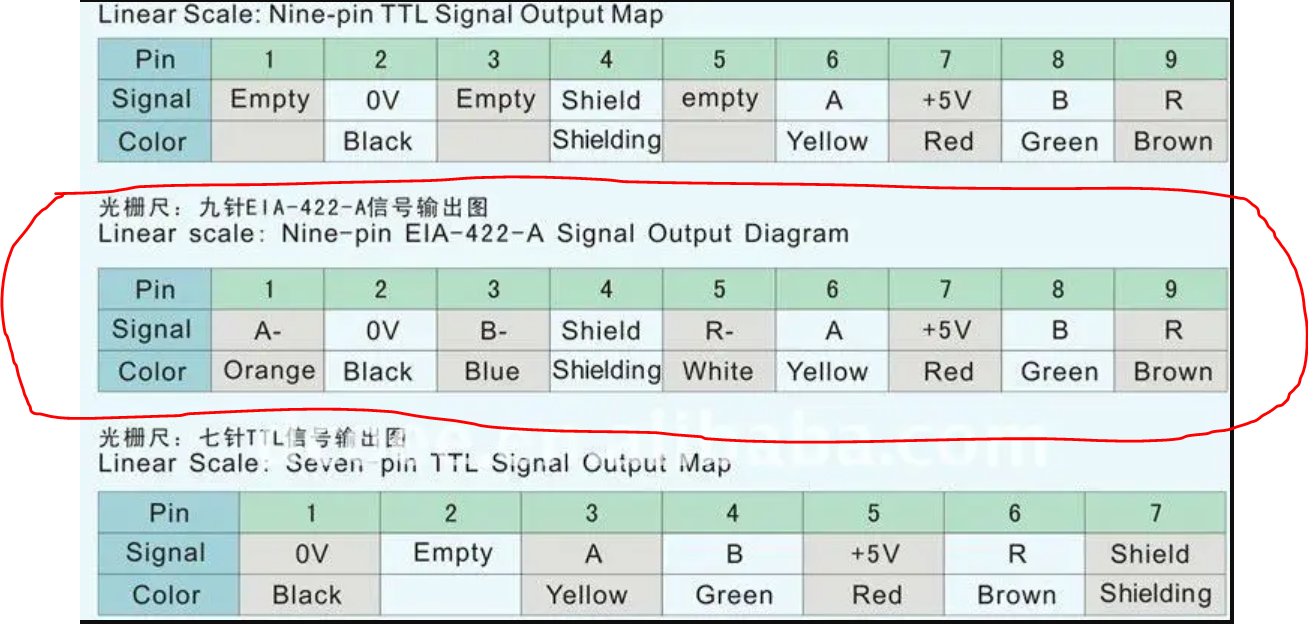
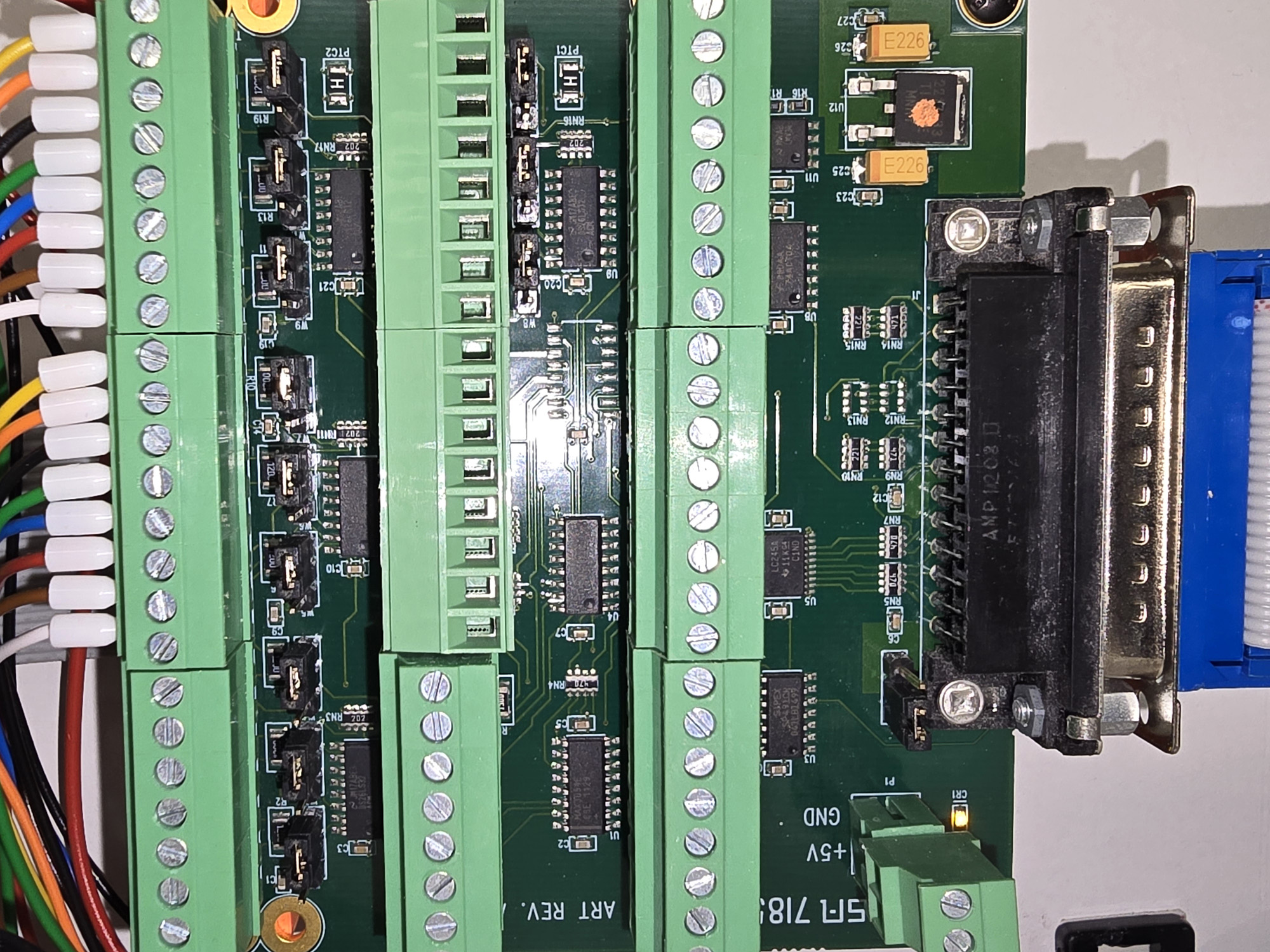
Unfortunately, the nine-pin TTL signal pin assignment is the same as the RS-422 assignment, except that A-, B-, and R- are omitted. The signals are then ignored anyway. So there's probably no point in changing the jumpers.
Or should I try?
Attachments:
Last edit: 15 Sep 2025 11:02 by WKS-3D.
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.212 seconds