Homing a dual-motor-for-one-axis gantry machine.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 23461
- Thank you received: 4992
29 Apr 2014 01:57 #46440
by andypugh
Sounds promising.
The top 3 commits here
timeguy.com/gitweb?p=linuxcnc.git;a=log;.../synchronized-homing
Are from a previous attempt at a similar approach (at the LinuxCNC fest)
I think he was trying much the same thing, possibly in a different way.
Replied by andypugh on topic Homing a dual-motor-for-one-axis gantry machine.
Spent another loose half an hour on the code, and it seems the new code does the trick, at least in simulation:
Sounds promising.
The top 3 commits here
timeguy.com/gitweb?p=linuxcnc.git;a=log;.../synchronized-homing
Are from a previous attempt at a similar approach (at the LinuxCNC fest)
I think he was trying much the same thing, possibly in a different way.
Please Log in or Create an account to join the conversation.
- DaBit
- Offline
- Platinum Member
-

Less
More
- Posts: 446
- Thank you received: 35
29 Apr 2014 03:44 - 29 Apr 2014 04:10 #46444
by DaBit
Replied by DaBit on topic Homing a dual-motor-for-one-axis gantry machine.
He must have tried something more complicated. All in all I don't have many hours of coding in it, and most of the time was browsing the LinuxCNC sources to satisfy my curiosity.
The hardware is progressing nicely too; this was the result of hooking up the last few wires for the X-axis servo and spending some time in the 'calibration' window: youtube.com/watch?v=rtJ3MGSM030.
It won't take months before I will test it on a real gantry and even less before I setup the X and Y axes of my current mill to simultaneous homing and see if they wait for each other. But for now the main priority is still wiring and mechanical things")
The hardware is progressing nicely too; this was the result of hooking up the last few wires for the X-axis servo and spending some time in the 'calibration' window: youtube.com/watch?v=rtJ3MGSM030.
It won't take months before I will test it on a real gantry and even less before I setup the X and Y axes of my current mill to simultaneous homing and see if they wait for each other. But for now the main priority is still wiring and mechanical things
Last edit: 29 Apr 2014 04:10 by DaBit.
Please Log in or Create an account to join the conversation.
- emcPT
-

- Offline
- Platinum Member
-
Less
More
- Posts: 702
- Thank you received: 139
29 Apr 2014 03:57 #46445
by emcPT
Replied by emcPT on topic Homing a dual-motor-for-one-axis gantry machine.
That is a FAST axis. 30m/min?
Please Log in or Create an account to join the conversation.
- DaBit
- Offline
- Platinum Member
-
Less
More
- Posts: 446
- Thank you received: 35
29 Apr 2014 04:10 - 29 Apr 2014 04:13 #46446
by DaBit
Replied by DaBit on topic Homing a dual-motor-for-one-axis gantry machine.
Yes, 30m/min. Your hardware is used well 
3000rpm/750W servo coupled with a 1:1 belt drive to a 10mm pitch ballscrew.
With 5000mm/sec^2 acceleration that doesn't even stress the motor. The servo is even allowed to go to 4500rpm so at 30m/min there is still steam left to correct position errors.
Truly an insane amount of violence, those servo motors (NEMA23 steppers is all I had seen before today).
3000rpm/750W servo coupled with a 1:1 belt drive to a 10mm pitch ballscrew.
With 5000mm/sec^2 acceleration that doesn't even stress the motor. The servo is even allowed to go to 4500rpm so at 30m/min there is still steam left to correct position errors.
Truly an insane amount of violence, those servo motors (NEMA23 steppers is all I had seen before today).
Last edit: 29 Apr 2014 04:13 by DaBit.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 5034
- Thank you received: 1467
29 Apr 2014 19:23 #46475
by Todd Zuercher
We have a few routers that do 80m/min (not LinuxCNC though). 5ft x 10ft fixed gantry moving table routers.They are a little scarey to be close to if you are not used to them. Knock you across the room if you stand in the wrong place at the wrong time.
Replied by Todd Zuercher on topic Homing a dual-motor-for-one-axis gantry machine.
That is a FAST axis. 30m/min?
We have a few routers that do 80m/min (not LinuxCNC though). 5ft x 10ft fixed gantry moving table routers.They are a little scarey to be close to if you are not used to them. Knock you across the room if you stand in the wrong place at the wrong time.
Please Log in or Create an account to join the conversation.
- DaBit
- Offline
- Platinum Member
-
Less
More
- Posts: 446
- Thank you received: 35
05 May 2014 15:01 - 05 May 2014 15:17 #46606
by DaBit
Replied by DaBit on topic Homing a dual-motor-for-one-axis gantry machine.
Even the 30m/min scared the hell out of me yesterday. The move to home position after the homing process is complete is a maximum speed move, and somehow I didn't expect it when I was watching the X-axis homing process closely. That axis accelerating to 500mm/sec (at 1G/10000mm/sec^2; forgot to set that back to a sane value after tinkering around a little  ) after the slow latch move made me jump a meter backwards
) after the slow latch move made me jump a meter backwards
Not so funny:
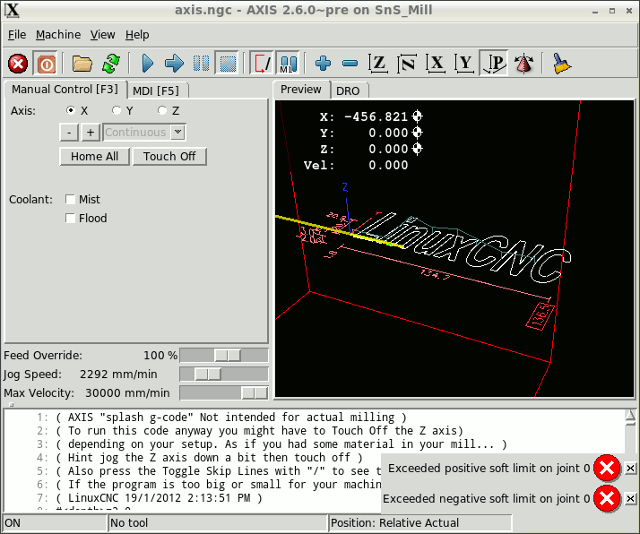
Right. In teleop mode the soft limits are recognised, but not obeyed.
To be honest I am 101% done with gantrykins
And since gentrivkins/JA4 seems no better, I am done with that too.
I returned the config to a normal 3-axis trivial kinematics machine, slaved the Y-axis motors in HAL and made it possible to introduce an offset between the two if desired (offset component between Y axis joints). If measurements prove that squaring the gantry is necessary, I can do that using a bit of wizardry using G38 probe cycles in a G code subroutine to find the references.
Once the machine is up and running I might be interested in trying to find a more structural solution. Synchronised homing would only be a part of that.
) after the slow latch move made me jump a meter backwards Not so funny:
Right. In teleop mode the soft limits are recognised, but not obeyed.
To be honest I am 101% done with gantrykins
And since gentrivkins/JA4 seems no better, I am done with that too.
I returned the config to a normal 3-axis trivial kinematics machine, slaved the Y-axis motors in HAL and made it possible to introduce an offset between the two if desired (offset component between Y axis joints). If measurements prove that squaring the gantry is necessary, I can do that using a bit of wizardry using G38 probe cycles in a G code subroutine to find the references.
Once the machine is up and running I might be interested in trying to find a more structural solution. Synchronised homing would only be a part of that.
Last edit: 05 May 2014 15:17 by DaBit.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 23461
- Thank you received: 4992
05 May 2014 18:34 #46618
by andypugh
I don't think that the people you need to discuss this with are on the forum.
This sort of thing really needs to be talked about on the developers mailing list.
Replied by andypugh on topic Homing a dual-motor-for-one-axis gantry machine.
To be honest I am 101% done with gantrykins
And since gentrivkins/JA4 seems no better, I am done with that too.
I don't think that the people you need to discuss this with are on the forum.
This sort of thing really needs to be talked about on the developers mailing list.
Please Log in or Create an account to join the conversation.
- DaBit
- Offline
- Platinum Member
-
Less
More
- Posts: 446
- Thank you received: 35
05 May 2014 19:27 - 05 May 2014 19:27 #46620
by DaBit
Replied by DaBit on topic Homing a dual-motor-for-one-axis gantry machine.
I am just done with gantrykins. That's just me. User error, underlying LinuxCNC issues, a combination of both, it doesn't matter; IMHO that doesn't belong on a developers mailing list unless I am prepared to actually do something to make it better. And currently I am not prepared to make it better since I have a plan B and building/finishing the mill is higher on the priority list.
Regarding synchronised homing: Initial testing with synchronised homing using the X and Y axes of my current mill does work. New mill uses both homeswitches and an index pulse; I prefer to test that configuration too before submitting a patch to that developer mailing list. I could set up a set of simulation testbenches, but a simulation is often not nearly as stubborn as the real thing. However, if anyone benefits from synchronised homing: ask and you shall receive..
Regarding synchronised homing: Initial testing with synchronised homing using the X and Y axes of my current mill does work. New mill uses both homeswitches and an index pulse; I prefer to test that configuration too before submitting a patch to that developer mailing list. I could set up a set of simulation testbenches, but a simulation is often not nearly as stubborn as the real thing. However, if anyone benefits from synchronised homing: ask and you shall receive..
Last edit: 05 May 2014 19:27 by DaBit.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 23461
- Thank you received: 4992
05 May 2014 19:32 #46621
by andypugh
Replied by andypugh on topic Homing a dual-motor-for-one-axis gantry machine.
My point is that if the project is distributing two different options that simply don't work, something should be done.I am just done with gantrykins. That's just me. User error, underlying LinuxCNC issues, a combination of both, it doesn't matter.
Please Log in or Create an account to join the conversation.
- DaBit
- Offline
- Platinum Member
-
Less
More
- Posts: 446
- Thank you received: 35
05 May 2014 19:56 #46625
by DaBit
Replied by DaBit on topic Homing a dual-motor-for-one-axis gantry machine.
OK, clear. I will do a posting on the mailing list.
The following user(s) said Thank You: crisiacuf
Please Log in or Create an account to join the conversation.
Time to create page: 0.075 seconds