Fail to homing
- Evgi
- Offline
- New Member
-

Less
More
- Posts: 7
- Thank you received: 0
07 Feb 2018 08:56 #105520
by Evgi
Fail to homing was created by Evgi
Hi guys,
I'm newbie in linuxcnc and I have just subscribed to the forum,
I ask your help cause i cannot perform homing correctly (the homing procedure appear to be not correct).
Home switches triggered but... instead stopping, axis continue going to the original position START with home_final_vel velocity
Config fil es attachment
I'm newbie in linuxcnc and I have just subscribed to the forum,
I ask your help cause i cannot perform homing correctly (the homing procedure appear to be not correct).
Home switches triggered but... instead stopping, axis continue going to the original position START with home_final_vel velocity
Config fil es attachment
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4764
- Thank you received: 1464
07 Feb 2018 13:55 - 07 Feb 2018 14:10 #105529
by Todd Zuercher
Replied by Todd Zuercher on topic Fail to homing
Can you start by describing precisely the homing behavior you want to achieve. (and probably a better description of exactly what is happening now.)
For example as you have the X axis now configured, this is what the machine will try to do; first is will search for the home switch in the negative direction at 1mm/sec, then when the home switch changes to true, it will move in the positive direction at 2.5mm/sec until the home switch goes false, at that point that position of the axis is set as 5mm, and finally the machine will move (or try to move until it hits a limit switch) a rapid rate (or what ever you set HOME_FINAL_VEL=) to point 0 (towards your home switch.)
This is obviously not going to be the movement you desire (probably not even physically possible.)
Edit: If you have the axis directions and or the state of home/limits configured backwards can and will throw a wrench in it all. For example if your home limit is a normally closed switch, you need to negate the pin to them by using "hm2_7i76e.0.7i76.0.0.input-00-not" in your hal file.
For example as you have the X axis now configured, this is what the machine will try to do; first is will search for the home switch in the negative direction at 1mm/sec, then when the home switch changes to true, it will move in the positive direction at 2.5mm/sec until the home switch goes false, at that point that position of the axis is set as 5mm, and finally the machine will move (or try to move until it hits a limit switch) a rapid rate (or what ever you set HOME_FINAL_VEL=) to point 0 (towards your home switch.)
This is obviously not going to be the movement you desire (probably not even physically possible.)
Edit: If you have the axis directions and or the state of home/limits configured backwards can and will throw a wrench in it all. For example if your home limit is a normally closed switch, you need to negate the pin to them by using "hm2_7i76e.0.7i76.0.0.input-00-not" in your hal file.
Last edit: 07 Feb 2018 14:10 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- Evgi
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
07 Feb 2018 16:03 #105532
by Evgi
Replied by Evgi on topic Fail to homing
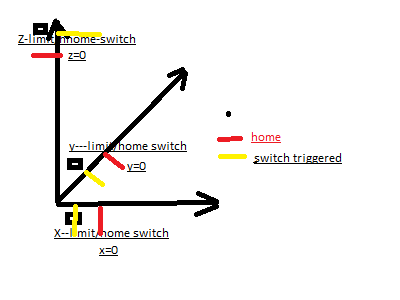
How that I see it should be. For example for Z axis:1) move to switch 2) triggered 3) Movement in the opposite direction= switch triggered coordinate minus 5mm 4) move low speed to switch 5) triggered 6) move to opposite direction(5mm) 7)home final(Z=0)
I have PNP switch
video
I have PNP switch
video
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17994
- Thank you received: 5281
07 Feb 2018 17:10 #105535
by PCW
Replied by PCW on topic Fail to homing
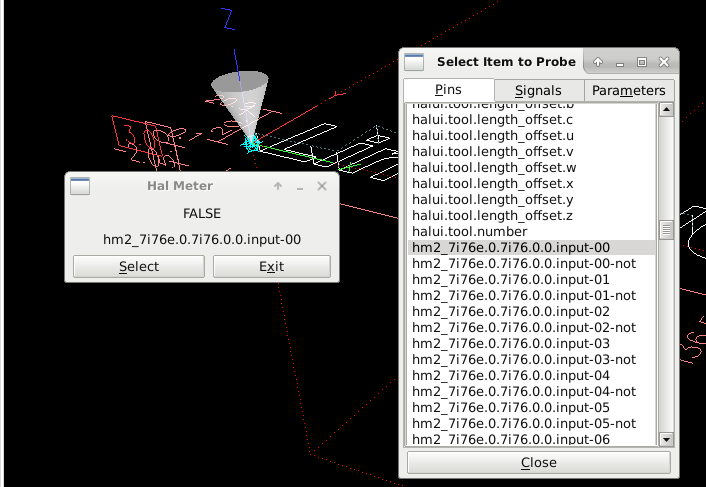
Before you even _try_ to home you should verify that the home switches work and as Todd mentioned have the correct polarity.
You can do this by watching or halmetering:
hm2_7i76e.0.7i76.0.0.input-00
hm2_7i76e.0.7i76.0.0.input-01
hm2_7i76e.0.7i76.0.0.input-02
As you trip the associated proximity switches
If these signals are true when not tripped (away from home) you need to use the inverted signals
You can do this by watching or halmetering:
hm2_7i76e.0.7i76.0.0.input-00
hm2_7i76e.0.7i76.0.0.input-01
hm2_7i76e.0.7i76.0.0.input-02
As you trip the associated proximity switches
If these signals are true when not tripped (away from home) you need to use the inverted signals
Please Log in or Create an account to join the conversation.
- Evgi
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
07 Feb 2018 19:56 #105538
by Evgi
Replied by Evgi on topic Fail to homing
If inverted :
hm2_7i76e.0.7i76.0.0.input-00-not
hm2_7i76e.0.7i76.0.0.input-01-not
hm2_7i76e.0.7i76.0.0.input-02-not
and toggle machine power --
joint0 on limit switches error
joint1 on limit switches error
joint2 on limit switches error
hm2_7i76e.0.7i76.0.0.input-00-not
hm2_7i76e.0.7i76.0.0.input-01-not
hm2_7i76e.0.7i76.0.0.input-02-not
and toggle machine power --
joint0 on limit switches error
joint1 on limit switches error
joint2 on limit switches error
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
07 Feb 2018 20:22 #105540
by Todd Zuercher
Replied by Todd Zuercher on topic Fail to homing
We did not say to just switch them. We said to switch them IF they are TRUE when the machine is away from them. Other wise they were already correct.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
07 Feb 2018 20:34 #105541
by Todd Zuercher
Replied by Todd Zuercher on topic Fail to homing
Try these settings in your ini file (Leave your hal file as it was)
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17994
- Thank you received: 5281
07 Feb 2018 20:37 - 07 Feb 2018 20:37 #105542
by PCW
Replied by PCW on topic Fail to homing
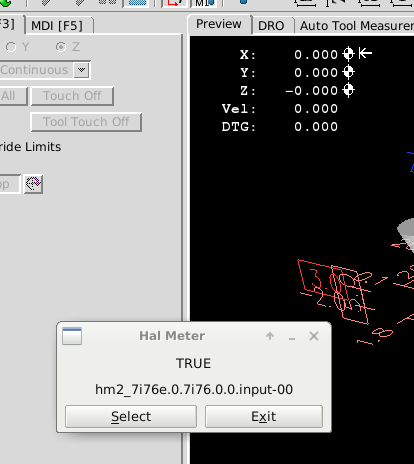
And before you even worry about the polarity you should check that LinuxCNC "sees" the switches
One way is this: ( in a terminal window when LinuxCNC is running )
halmeter hm2_7i76e.0.7i76.0.0.input-00
and the activate the switch to see if its state changes in halmeter
One way is this: ( in a terminal window when LinuxCNC is running )
halmeter hm2_7i76e.0.7i76.0.0.input-00
and the activate the switch to see if its state changes in halmeter
Last edit: 07 Feb 2018 20:37 by PCW.
Please Log in or Create an account to join the conversation.
- Evgi
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
07 Feb 2018 21:22 - 07 Feb 2018 21:43 #105545
by Evgi
Replied by Evgi on topic Fail to homing
check switches--all correct
triggered
new ini--nothing has changed--at the end of the video, the switch X triggered--jump to old coordinate
triggered
new ini--nothing has changed--at the end of the video, the switch X triggered--jump to old coordinate
Last edit: 07 Feb 2018 21:43 by Evgi.
Please Log in or Create an account to join the conversation.
- Evgi
- Offline
- New Member
-
Less
More
- Posts: 7
- Thank you received: 0
08 Feb 2018 15:39 #105579
by Evgi
Replied by Evgi on topic Fail to homing
what should i do now?
new problem
a line is not initialized: RS274NGC_STARTUP_CODE = G17 G21 G40 G43H0 G54 G64P0.5 G80 G90 G94 G97 M5 M9.
I run the test program and saw that the code G64P0.5 does not work, but if you enter in the MDI then everything is fine/
And yet why is there no correct search at home?Always returns to the START point.
new problem
a line is not initialized: RS274NGC_STARTUP_CODE = G17 G21 G40 G43H0 G54 G64P0.5 G80 G90 G94 G97 M5 M9.
I run the test program and saw that the code G64P0.5 does not work, but if you enter in the MDI then everything is fine/
And yet why is there no correct search at home?Always returns to the START point.
Please Log in or Create an account to join the conversation.
Time to create page: 0.133 seconds