Arrows keys -> spindle in wrong direction
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4761
- Thank you received: 1463
27 Sep 2017 13:54 #99520
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
If it's real servos then there shouldn't be any problem, but you will still need to tune the PID loop.
Please Log in or Create an account to join the conversation.
- tecno
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
27 Sep 2017 13:57 #99521
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Yes I am aware of that, done this i KFlop with DC servos and these AC servos with Granite Devices VSD-XE drivers and sure enough it scares the shit out of anybody having wrong PID parameters.
I´ll be back")
I´ll be back
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
27 Sep 2017 17:39 #99522
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
So here the result.
PID 7 shoots over few tenths/mm and rocks back and forth +-1µm for a while like 5sor more until it gets stabilized.
What do you suggest to do now, edit Y and Z to get similar results?
Had to change encoder scaling from 1000 to 4000 to get correct travel.
PID 7 shoots over few tenths/mm and rocks back and forth +-1µm for a while like 5sor more until it gets stabilized.
What do you suggest to do now, edit Y and Z to get similar results?
Had to change encoder scaling from 1000 to 4000 to get correct travel.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
27 Sep 2017 17:56 #99524
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
If you are happy with the results leave it.
It is hard (impossible) to make any suggestions for tuning without seeing what the halscope plot looks like.
I often like to set the deadband for the PID loop I'm tuning to somewhere between 1 and 1.5 encoder counts (something like 0.0003 for this axis.)
Maybe adding a small amount of D can reduce the overshoot and the oscillations? (Won't know unless you try
Remember the PID constants don't have to be whole numbers they are floats.
It is hard (impossible) to make any suggestions for tuning without seeing what the halscope plot looks like.
I often like to set the deadband for the PID loop I'm tuning to somewhere between 1 and 1.5 encoder counts (something like 0.0003 for this axis.)
Maybe adding a small amount of D can reduce the overshoot and the oscillations? (Won't know unless you try
Remember the PID constants don't have to be whole numbers they are floats.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
27 Sep 2017 18:02 #99525
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
OK, I will try to see if can hook up the halscope tomorrow to get a clearer picture what is happening.
It is not perfect as it is now so I will play around with small amount of D, 0.001 or something like that to start with?
But it is not so bad either
Will let you know my results tomorrow.
Have a nice one, now time to relax over here with TV and go to sleep.
It is not perfect as it is now so I will play around with small amount of D, 0.001 or something like that to start with?
But it is not so bad either
Will let you know my results tomorrow.
Have a nice one, now time to relax over here with TV and go to sleep.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Sep 2017 13:17 #99547
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Need help what to look at with Halscope, please and how to start this. halcmd halscope?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
28 Sep 2017 14:13 #99550
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
You can start it from the command line with:
Or you can open it from within your machines UI. You are using Gmoccapy, and there is a button for opening Halscope at the bottom of the maintenance page.
Also at the bottom of that page is a button that opens a Calibration screen where you can make adjustments to your PID settings on the fly while you are tuning.
When you open Halscope for the first time you will be prompted to choose a thread to sample with, set a sampling period (multiple of the sampling thread), and choose a recording length. (The default settings should be fine.)
The numbered buttons at the bottom of the screen select the channels and set the hal pins they monitor. You will want to look at the pins axis.N.joint-vel-cmd, hm2_7i76e.0.encoder.NN.velocity, and pid.N.error. I usually like to set the trigger for Halscope on the velocity command signal. Then I'll do some incremental jogs at a moderate speed and look at the traces.
The idea here when you are tuning is to try to get the velocity feedback to match the velocity command and make the following error as close to zero as possible. If your drives are tuned well you should be able to get it with in +/- a few encoder counts, when stopped and moving slowly and 10-20 at faster speeds.
halcmd loadusr halscopeOr you can open it from within your machines UI. You are using Gmoccapy, and there is a button for opening Halscope at the bottom of the maintenance page.
Also at the bottom of that page is a button that opens a Calibration screen where you can make adjustments to your PID settings on the fly while you are tuning.
When you open Halscope for the first time you will be prompted to choose a thread to sample with, set a sampling period (multiple of the sampling thread), and choose a recording length. (The default settings should be fine.)
The numbered buttons at the bottom of the screen select the channels and set the hal pins they monitor. You will want to look at the pins axis.N.joint-vel-cmd, hm2_7i76e.0.encoder.NN.velocity, and pid.N.error. I usually like to set the trigger for Halscope on the velocity command signal. Then I'll do some incremental jogs at a moderate speed and look at the traces.
The idea here when you are tuning is to try to get the velocity feedback to match the velocity command and make the following error as close to zero as possible. If your drives are tuned well you should be able to get it with in +/- a few encoder counts, when stopped and moving slowly and 10-20 at faster speeds.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Sep 2017 14:51 #99554
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Here is X axis plot
P 6.8
I 0.0
D 0.15
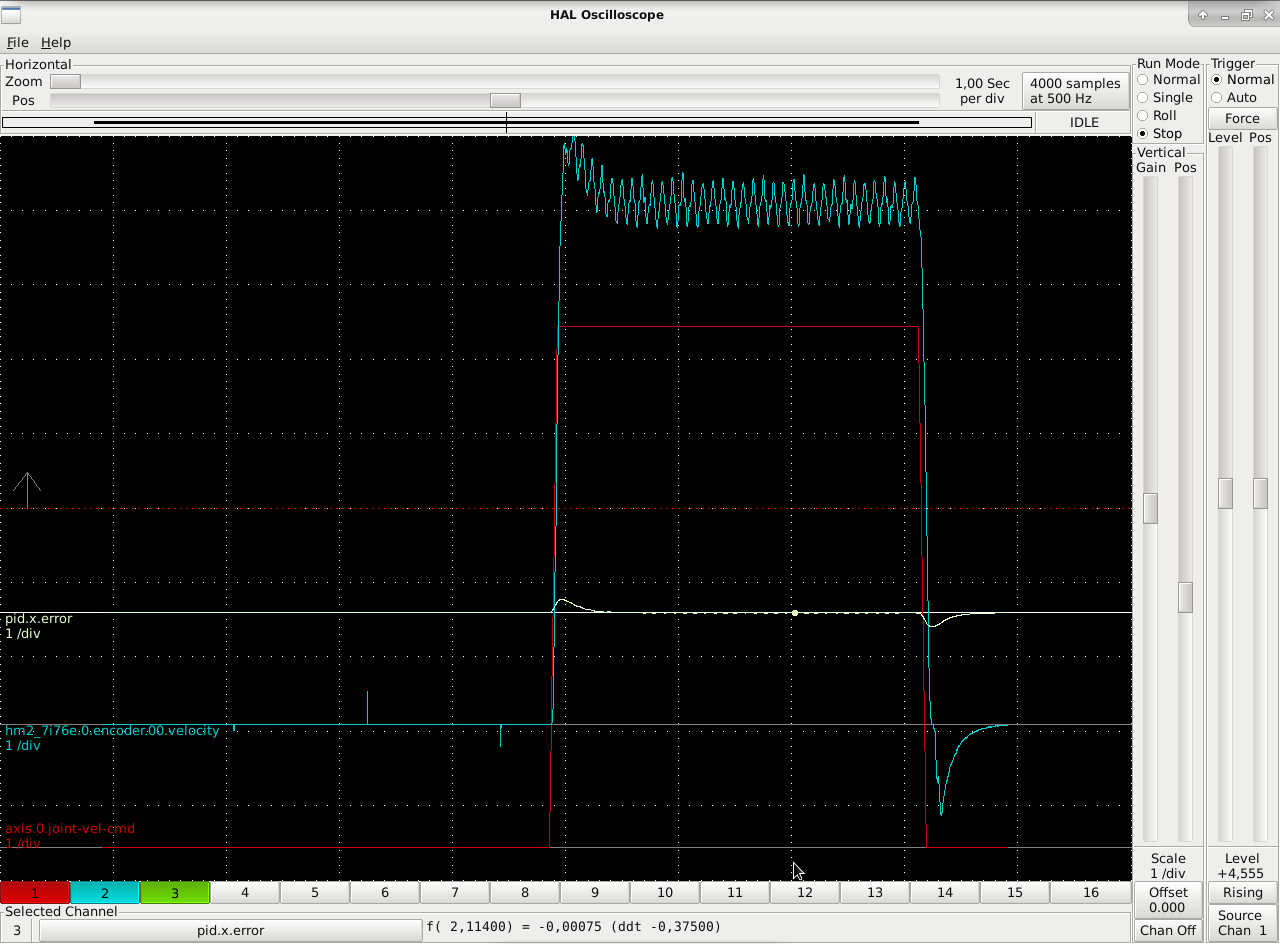
What can be interpreted from this?
P 6.8
I 0.0
D 0.15
What can be interpreted from this?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
28 Sep 2017 15:17 - 28 Sep 2017 15:18 #99557
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
A small amount of FF2 may improve the the error during acceleration. (Be careful a little bit goes a long way.)
More D to try to reduce the overshoot some more.
Increase the vertical gain on the error, so we can better see what is going on there.
Probably will need more P, (I have a feeling that the instability during cruse isn't because of too much P)
But only make one adjustment at a time,
More D to try to reduce the overshoot some more.
Increase the vertical gain on the error, so we can better see what is going on there.
Probably will need more P, (I have a feeling that the instability during cruse isn't because of too much P)
But only make one adjustment at a time,
Last edit: 28 Sep 2017 15:18 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Sep 2017 18:11 #99570
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Enclosed latest plot with PIR.error largely magnified
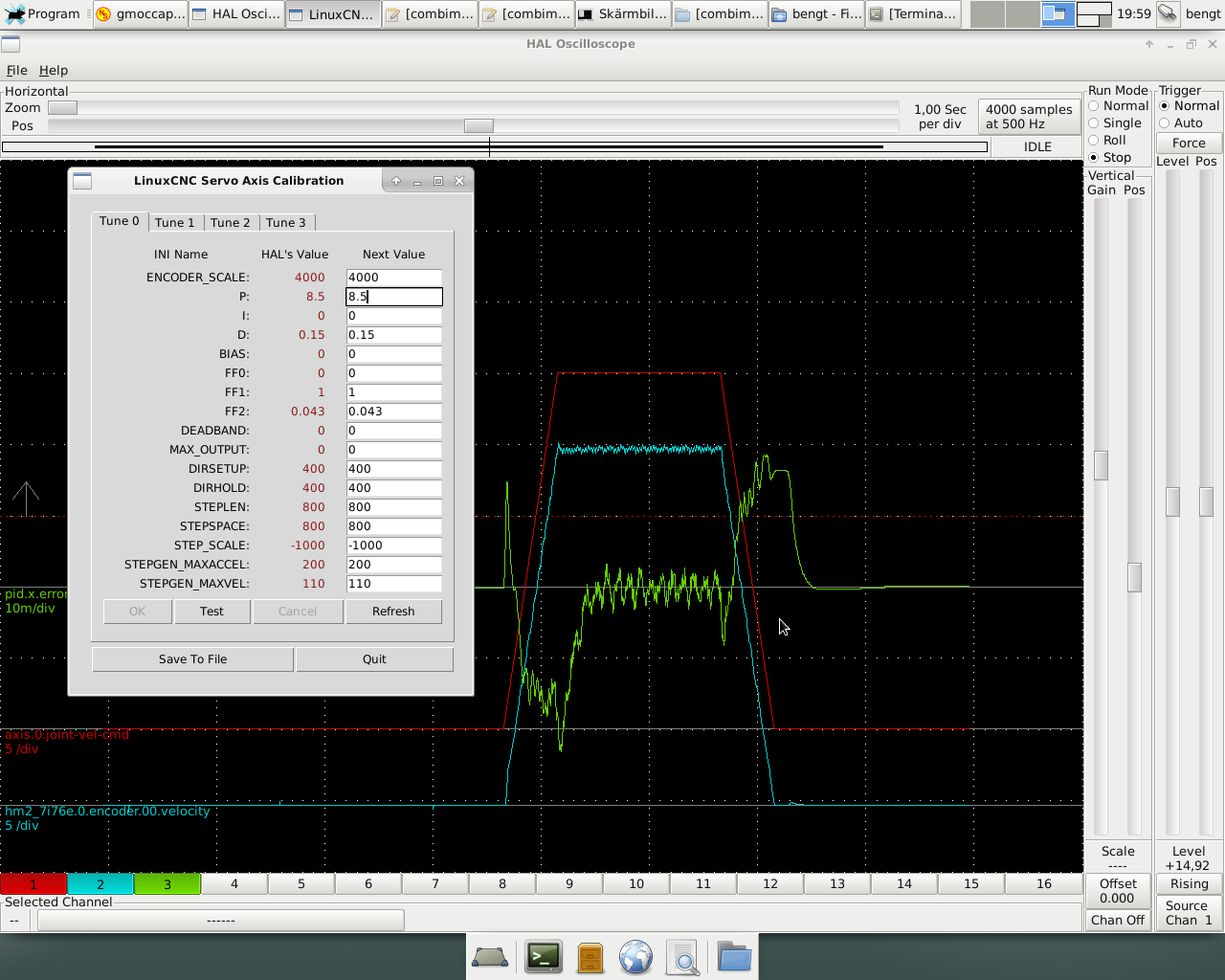
This is G0X50 move
Looks OK to me
Y axis is behaving odd = move is short = more tuning
Z axis faults in following error, very slow jog it follows a bit = more tuning
P 8
D 0.15
On both axis above
This is G0X50 move
Looks OK to me
Y axis is behaving odd = move is short = more tuning
Z axis faults in following error, very slow jog it follows a bit = more tuning
P 8
D 0.15
On both axis above
Please Log in or Create an account to join the conversation.
Time to create page: 0.222 seconds