Arrows keys -> spindle in wrong direction
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4761
- Thank you received: 1463
28 Sep 2017 18:25 #99574
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
Looks like a little too much FF2.
How much P can you add before it becomes unstable?
How much P can you add before it becomes unstable?
Please Log in or Create an account to join the conversation.
- tecno
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Sep 2017 19:06 #99578
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
OK, will have to play more tomorrow.
I do not know how much P I can do, will let you know tomorrow.
Is the PID error optimal as a horisontal line? Or same wave form as the 2 other pins?
I do not know how much P I can do, will let you know tomorrow.
Is the PID error optimal as a horisontal line? Or same wave form as the 2 other pins?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
28 Sep 2017 19:23 #99581
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
A flat line of 0 is perfection (you'll never get there though)
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Sep 2017 19:28 #99582
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
LoL
I just started to play with Y axis and got 3 similar wave forms. Sluggish axis movement at the end.
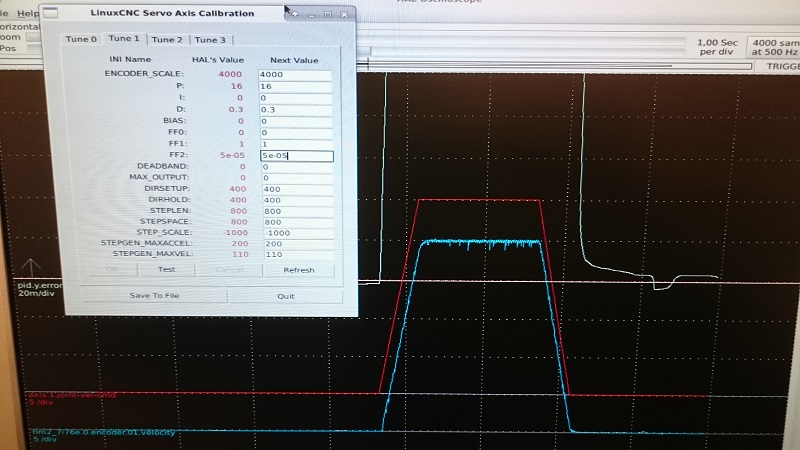
Still a lot to tune but I got tired and then it is better to do it tomorrow. Any suggestions?
I just started to play with Y axis and got 3 similar wave forms. Sluggish axis movement at the end.
Still a lot to tune but I got tired and then it is better to do it tomorrow. Any suggestions?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
28 Sep 2017 20:22 - 28 Sep 2017 20:27 #99589
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
More P.
PS
I am a little surprised that the P for your X would be less than 10. On my closed loop step/dir servo I have P between 200-500.
PS
I am a little surprised that the P for your X would be less than 10. On my closed loop step/dir servo I have P between 200-500.
Last edit: 28 Sep 2017 20:27 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17990
- Thank you received: 5281
28 Sep 2017 20:38 #99590
by PCW
Replied by PCW on topic Arrows keys -> spindle in wrong direction
This behavior (creeping an end of move) is often the result of pncconfs default PID
maxerror setting which is OK for inch machines but not for mm
Set it to 0 or .01
maxerror setting which is OK for inch machines but not for mm
Set it to 0 or .01
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
29 Sep 2017 07:24 - 29 Sep 2017 08:24 #99600
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Hmmm, what line in INI is that PID maxerror?
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 70
MAX_ACCELERATION = 100
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 110
STEPGEN_MAXACCEL = 200
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 400
DIRHOLD = 400
STEPLEN = 800
STEPSPACE = 800
STEP_SCALE = 1000
MIN_LIMIT = -430
MAX_LIMIT = 10
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = 10.00000
HOME_LATCH_VEL = 3.00000
HOME_FINAL_VEL = .500000
HOME_USE_INDEX = NO
HOME_SEQUENCE = 2
ENCODER_SCALE = 1000
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 70
MAX_ACCELERATION = 100
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 110
STEPGEN_MAXACCEL = 200
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 400
DIRHOLD = 400
STEPLEN = 800
STEPSPACE = 800
STEP_SCALE = 1000
MIN_LIMIT = -430
MAX_LIMIT = 10
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = 10.00000
HOME_LATCH_VEL = 3.00000
HOME_FINAL_VEL = .500000
HOME_USE_INDEX = NO
HOME_SEQUENCE = 2
ENCODER_SCALE = 1000
Last edit: 29 Sep 2017 08:24 by tecno. Reason: edit text
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
29 Sep 2017 08:23 - 29 Sep 2017 08:25 #99603
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
Doh.. the line is in HAL
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> change this value to 0 or 0.1 ??
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.00.dirsetup [AXIS_0]DIRSETUP
setp hm2_7i76e.0.stepgen.00.dirhold [AXIS_0]DIRHOLD
setp hm2_7i76e.0.stepgen.00.steplen [AXIS_0]STEPLEN
setp hm2_7i76e.0.stepgen.00.stepspace [AXIS_0]STEPSPACE
setp hm2_7i76e.0.stepgen.00.position-scale [AXIS_0]STEP_SCALE
setp hm2_7i76e.0.stepgen.00.step_type 2
setp hm2_7i76e.0.stepgen.00.control-type 1
setp hm2_7i76e.0.stepgen.00.maxaccel [AXIS_0]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.00.maxvel [AXIS_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= axis.0.motor-pos-cmd
net x-vel-cmd <= axis.0.joint-vel-cmd
net x-output <= hm2_7i76e.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i76e.0.stepgen.00.position-fb
net x-pos-fb => axis.0.motor-pos-fb
net x-enable <= axis.0.amp-enable-out
net x-enable => hm2_7i76e.0.stepgen.00.enable
# ---setup home / limit switch signals---
net home-x => axis.0.home-sw-in
net min-x => axis.0.neg-lim-sw-in
net max-x => axis.0.pos-lim-sw-in
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>> change this value to 0 or 0.1 ??
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# Step Gen signals/setup
setp hm2_7i76e.0.stepgen.00.dirsetup [AXIS_0]DIRSETUP
setp hm2_7i76e.0.stepgen.00.dirhold [AXIS_0]DIRHOLD
setp hm2_7i76e.0.stepgen.00.steplen [AXIS_0]STEPLEN
setp hm2_7i76e.0.stepgen.00.stepspace [AXIS_0]STEPSPACE
setp hm2_7i76e.0.stepgen.00.position-scale [AXIS_0]STEP_SCALE
setp hm2_7i76e.0.stepgen.00.step_type 2
setp hm2_7i76e.0.stepgen.00.control-type 1
setp hm2_7i76e.0.stepgen.00.maxaccel [AXIS_0]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.00.maxvel [AXIS_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= axis.0.motor-pos-cmd
net x-vel-cmd <= axis.0.joint-vel-cmd
net x-output <= hm2_7i76e.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i76e.0.stepgen.00.position-fb
net x-pos-fb => axis.0.motor-pos-fb
net x-enable <= axis.0.amp-enable-out
net x-enable => hm2_7i76e.0.stepgen.00.enable
# ---setup home / limit switch signals---
net home-x => axis.0.home-sw-in
net min-x => axis.0.neg-lim-sw-in
net max-x => axis.0.pos-lim-sw-in
Last edit: 29 Sep 2017 08:25 by tecno. Reason: edit text
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
29 Sep 2017 13:14 #99611
by Todd Zuercher
Replied by Todd Zuercher on topic Arrows keys -> spindle in wrong direction
i thought I suggested commenting that line out further up the pipe.
forum.linuxcnc.org/9-installing-linuxcnc...rong-direction#99517
forum.linuxcnc.org/9-installing-linuxcnc...rong-direction#99517
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
29 Sep 2017 13:18 #99612
by tecno
Replied by tecno on topic Arrows keys -> spindle in wrong direction
It is removed as per your suggestion, so many lines/parameters makes ones head spin around.
Please Log in or Create an account to join the conversation.
Time to create page: 0.146 seconds