i5-8250U laptop for Linuxcnc with ethernet
- taloot
- Offline
- Elite Member
-

Less
More
- Posts: 175
- Thank you received: 89
29 Apr 2020 22:00 #166151
by taloot
Replied by taloot on topic i5-8250U laptop for Linuxcnc with ethernet
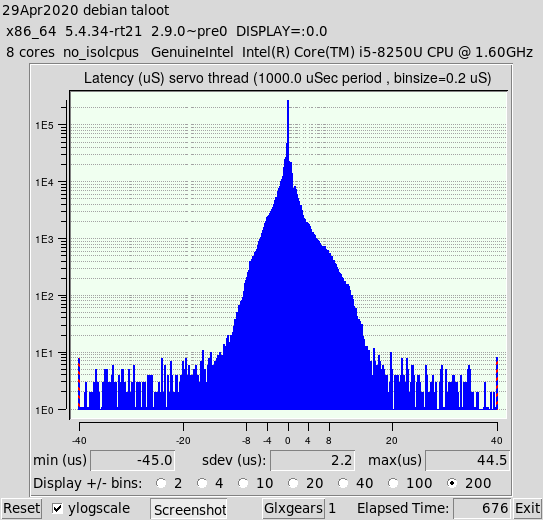
Note that as long as you can reliably meet the 1 ms servo thread deadline
with a few 100 usec to spare, there is no advantage to futzing around to get
the minimum latency as it simply does not matter (at least with most hardware interfaces)
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21741
- Thank you received: 7430
30 Apr 2020 07:31 #166197
by tommylight
Replied by tommylight on topic i5-8250U laptop for Linuxcnc with ethernet
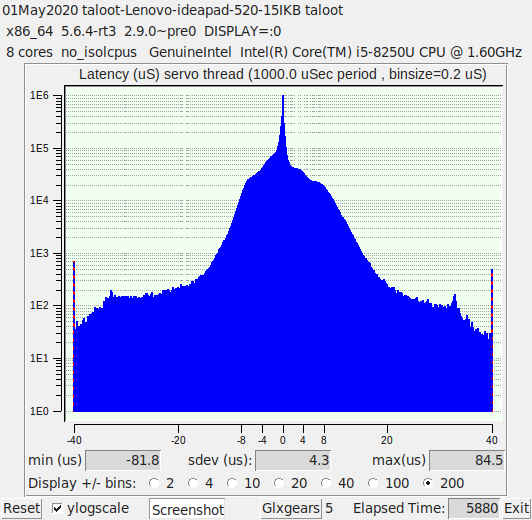
That looks very good, but only one glxgears and 10 minutes time.
Leave it for an hour at least 10 glxgears, play youtube videos, copy some files around.....
Leave it for an hour at least 10 glxgears, play youtube videos, copy some files around.....
Please Log in or Create an account to join the conversation.
- taloot
- Offline
- Elite Member
-
Less
More
- Posts: 175
- Thank you received: 89
30 Apr 2020 18:01 - 30 Apr 2020 18:04 #166233
by taloot
Replied by taloot on topic i5-8250U laptop for Linuxcnc with ethernet
i retweak the kernel,, and running the test again with 10glxgear
the servo i m using is delta A3 and it have 3.1khz bandwidth,,, is this should match the servo thread or its not related
www.deltaww.com/Products/CategoryListT1....&Name=ASDA-A3+Series
the servo i m using is delta A3 and it have 3.1khz bandwidth,,, is this should match the servo thread or its not related
www.deltaww.com/Products/CategoryListT1....&Name=ASDA-A3+Series
Last edit: 30 Apr 2020 18:04 by taloot.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
30 Apr 2020 18:14 #166236
by PCW
Replied by PCW on topic i5-8250U laptop for Linuxcnc with ethernet
No, assuming either position or velocity control in the drive, the servo thread
only need be fast enough to allow velocity ramp up and down with enough
steps to be smooth (this is acceleration dependent)
only need be fast enough to allow velocity ramp up and down with enough
steps to be smooth (this is acceleration dependent)
Please Log in or Create an account to join the conversation.
- taloot
- Offline
- Elite Member
-
Less
More
- Posts: 175
- Thank you received: 89
30 Apr 2020 18:29 - 30 Apr 2020 18:31 #166239
by taloot
Replied by taloot on topic i5-8250U laptop for Linuxcnc with ethernet
so when using high response servo.. i need 2khz servo thread.
i will run them in Pulse/Step,, MAX 4MHZ
the driver it self have filtering, and auto tuning, also S curve
i will run them in Pulse/Step,, MAX 4MHZ
the driver it self have filtering, and auto tuning, also S curve
Last edit: 30 Apr 2020 18:31 by taloot.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
30 Apr 2020 18:39 #166241
by PCW
Replied by PCW on topic i5-8250U laptop for Linuxcnc with ethernet
It depends on the system acceleration and accuracy requirements.
1 KHz is usually fine. You can calculate the chord error
(caused by linear interpolation between sample period waypoints)
and see if its significant with your machine motions constraints:
Chord error polygon vs circle = R (1-cos(180/N))
R = radius
N = sides
R = Minimum Radius= V^2/A
N = Sides = T_Circle/T_Sample
1 KHz is usually fine. You can calculate the chord error
(caused by linear interpolation between sample period waypoints)
and see if its significant with your machine motions constraints:
Chord error polygon vs circle = R (1-cos(180/N))
R = radius
N = sides
R = Minimum Radius= V^2/A
N = Sides = T_Circle/T_Sample
The following user(s) said Thank You: taloot
Please Log in or Create an account to join the conversation.
- taloot
- Offline
- Elite Member
-
Less
More
- Posts: 175
- Thank you received: 89
01 May 2020 16:11 - 01 May 2020 16:12 #166337
by taloot
Replied by taloot on topic i5-8250U laptop for Linuxcnc with ethernet
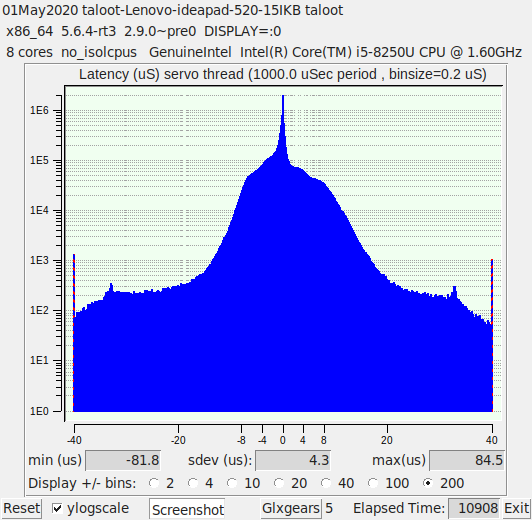
this result, is it ok for external motion controller?
in another word,, am i going to gain anything if the latency is lower?
in another word,, am i going to gain anything if the latency is lower?
Last edit: 01 May 2020 16:12 by taloot.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
01 May 2020 16:47 - 01 May 2020 16:48 #166340
by PCW
Replied by PCW on topic i5-8250U laptop for Linuxcnc with ethernet
That should be fine for a 1 KHz servo thread. You can also get some idea of the network
stack latency by pinging the Ethernet card and checking the min and max ping times.
The first ping will likely be longer since the host needs to acquire the remote cards
MAC address via an ARP transaction.
stack latency by pinging the Ethernet card and checking the min and max ping times.
The first ping will likely be longer since the host needs to acquire the remote cards
MAC address via an ARP transaction.
Last edit: 01 May 2020 16:48 by PCW.
Please Log in or Create an account to join the conversation.
- taloot
- Offline
- Elite Member
-
Less
More
- Posts: 175
- Thank you received: 89
01 May 2020 17:03 #166342
by taloot
Replied by taloot on topic i5-8250U laptop for Linuxcnc with ethernet
about 0.22ms
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
01 May 2020 19:22 - 01 May 2020 19:27 #166357
by PCW
Replied by PCW on topic i5-8250U laptop for Linuxcnc with ethernet
If the laptop has a Intel MAC you may be able to improve this by disabling IRQ coalescing:
sudo ethtool -C edevice rx-usecs 0
where edevice is your Ethernet device name (eth1, eth0, eno1 etc etc)
sudo ethtool -C edevice rx-usecs 0
where edevice is your Ethernet device name (eth1, eth0, eno1 etc etc)
Last edit: 01 May 2020 19:27 by PCW.
Please Log in or Create an account to join the conversation.
Time to create page: 0.356 seconds