Running SIM in VM for QTPlasmaC
- Doug @ Design8Studio.com
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 131
- Thank you received: 46
22 Jan 2023 20:59 #262676
by Doug @ Design8Studio.com
Running SIM in VM for QTPlasmaC was created by Doug @ Design8Studio.com
I'm a newbie with Linux. How does one boot to a non-rt kernel?
I'm trying to get a VM testing setup working. I got Linux Buster installed in a VM, using LinuxCNC ISO for 2.8, and then I updated LinuxCNC from 2.8 to 2.10 to match my live, working setup.
Whenever I try to run a SIM version of QTPlasmaC, I get all kinds of errors, shown below.
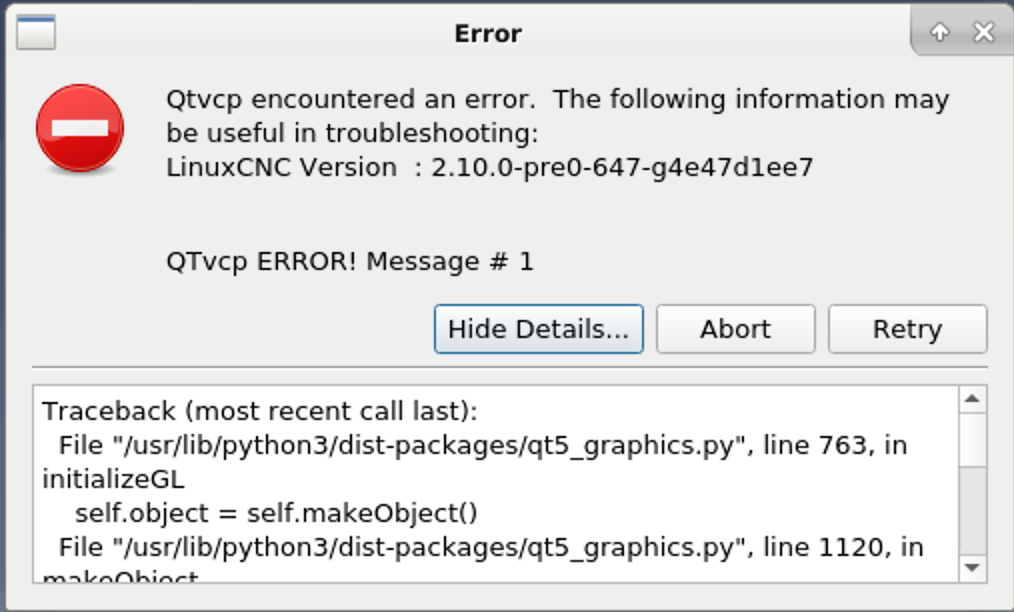
Traceback (most recent call last):
File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 763, in initializeGL
self.object = self.makeObject()
File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 1120, in makeObject
genList = GL.glGenLists(1)
File "/usr/lib/python3/dist-packages/OpenGL/platform/baseplatform.py", line 402, in __call__
return self( *args, **named )
File "/usr/lib/python3/dist-packages/OpenGL/error.py", line 232, in glCheckError
baseOperation = baseOperation,
OpenGL.error.GLError: GLError(
err = 1280,
description = b'invalid enumerant',
baseOperation = glGenLists,
cArguments = (1,),
result = 1
)
I'm trying to get a VM testing setup working. I got Linux Buster installed in a VM, using LinuxCNC ISO for 2.8, and then I updated LinuxCNC from 2.8 to 2.10 to match my live, working setup.
Whenever I try to run a SIM version of QTPlasmaC, I get all kinds of errors, shown below.
Traceback (most recent call last):
File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 763, in initializeGL
self.object = self.makeObject()
File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 1120, in makeObject
genList = GL.glGenLists(1)
File "/usr/lib/python3/dist-packages/OpenGL/platform/baseplatform.py", line 402, in __call__
return self( *args, **named )
File "/usr/lib/python3/dist-packages/OpenGL/error.py", line 232, in glCheckError
baseOperation = baseOperation,
OpenGL.error.GLError: GLError(
err = 1280,
description = b'invalid enumerant',
baseOperation = glGenLists,
cArguments = (1,),
result = 1
)
Please Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
22 Jan 2023 21:48 #262679
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
In various bouts of googling, I found the following:
unix.stackexchange.com/questions/644173/...nel-in-my-debian-box
And ran this in terminal:
sudo apt install linux-image-amd64 linux-headers-amd64
Which seems to have succeeded, resulting in this announcement:
Warning: os-prober will be executed to detect other bootable partitions.
Its output will be used to detect bootable binaries on them and create new boot entries.
done
Setting up linux-image-amd64 (4.19+105+deb10u18)
The page also mentioned going for nvidia-drivers, but without details and I don't know if I need that or not, and my effort to get it failed, and I rebooted and chose (in advanced options) a non-rt kernel, and I still cannot open the QTPlasmaC SIM, in the VM. Below is the error report on it:
unix.stackexchange.com/questions/644173/...nel-in-my-debian-box
And ran this in terminal:
sudo apt install linux-image-amd64 linux-headers-amd64
Which seems to have succeeded, resulting in this announcement:
Warning: os-prober will be executed to detect other bootable partitions.
Its output will be used to detect bootable binaries on them and create new boot entries.
done
Setting up linux-image-amd64 (4.19+105+deb10u18)
The page also mentioned going for nvidia-drivers, but without details and I don't know if I need that or not, and my effort to get it failed, and I rebooted and chose (in advanced options) a non-rt kernel, and I still cannot open the QTPlasmaC SIM, in the VM. Below is the error report on it:
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl: Print file information:RUN_IN_PLACE=noLINUXCNC_DIR=LINUXCNC_BIN_DIR=/usr/binLINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcncLINUXCNC_SCRIPT_DIR=LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modulesLINUXCNC_CONFIG_DIR=LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgsINIVAR=inivarHALCMD=halcmdLINUXCNC_EMCSH=/usr/bin/wish8.6LINUXCNC - 2.10.0-pre0-647-g4e47d1ee7Machine configuration directory is '/home/doug/linuxcnc/configs/sim.qtplasmac'Machine configuration file is 'qtplasmac_l_imperial.ini.expanded'INIFILE=/home/doug/linuxcnc/configs/sim.qtplasmac/qtplasmac_l_imperial.ini.expandedVERSION=1.1PARAMETER_FILE=imperial_parameters.txtTPMOD=HOMEMOD=TASK=milltaskHALUI=haluiDISPLAY=qtvcp qtplasmacCOORDINATES=XYYZKINEMATICS=trivkins coordinates=xyyzStarting LinuxCNC...Starting LinuxCNC server program: linuxcncsvrLoading Real Time OS, RTAPI, and HAL_LIB modulesStarting LinuxCNC IO program: ioStarting HAL User Interface program: haluilinuxcnc TPMOD=tpmod HOMEMOD=homemod EMCMOT=motmodtwopass:invoked with <> optionstwopass:found ./sim_no_stepgen.tcltwopass:found /usr/share/linuxcnc/hallib/qtplasmac_comp.haltwopass:found ./custom.halStarting TASK program: milltaskStarting DISPLAY program: qtvcpShutting down and cleaning up LinuxCNC...task: 1434 cycles, min=0.000005, max=0.013331, avg=0.009971, 0 latency excursions (> 10x expected cycle time of 0.010000s) identityKinematicsSetup: coordinates:xyyz Joint 0 ==> Axis X Joint 1 ==> Axis Y Joint 2 ==> Axis Y Joint 3 ==> Axis ZidentityKinematicsSetup: Recommend: kinstype=both Removing HAL_LIB, RTAPI, and Real Time OS modulesRemoving NML shared memory segments Debug file information:Can not find -sec DISPLAY -var INTRO_GRAPHIC -num 1 Can not find -sec DISPLAY -var INTRO_TIME -num 1 Note: Using POSIX non-realtime[QTvcp][#[41mCRITICAL#[0m] Aborted from Error Dialog Qtvcp encountered an error. The following information may be useful in troubleshooting:LinuxCNC Version : 2.10.0-pre0-647-g4e47d1ee7 Traceback (most recent call last): File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 763, in initializeGL self.object = self.makeObject() File "/usr/lib/python3/dist-packages/qt5_graphics.py", line 1120, in makeObject genList = GL.glGenLists(1) File "/usr/lib/python3/dist-packages/OpenGL/platform/baseplatform.py", line 402, in __call__ return self( *args, **named ) File "/usr/lib/python3/dist-packages/OpenGL/error.py", line 232, in glCheckError baseOperation = baseOperation,OpenGL.error.GLError: GLError(err = 1280,description = b'invalid enumerant',baseOperation = glGenLists,cArguments = (1,),result = 1) (qtvcp:503)/usr/bin/linuxcnc: line 968: 1581 Segmentation fault $EMCDISPLAY -ini "$INIFILE" $EMCDISPLAYARGS $EXTRA_ARGS15471578Stopping realtime threadsUnloading hal componentsNote: Using POSIX non-realtime -----------------------------------------------------------------------Info report created by linuxcnc_info:The file: /tmp/linuxcnc_info.txtcan be posted to a forum or a web site like: http://pastebin.comin order to provide information about the linuxcncsystem and configuration. Date: Sun 22 Jan 2023 04:47:20 PM EST UTC Date: Sun 22 Jan 2023 09:47:20 PM UTC this program: /usr/bin/linuxcnc_info uptime: 16:47:20 up 3 min, 1 user, load average: 0.02, 0.04, 0.01 lsb_release -sa: Debian Debian GNU/Linux 10 (buster) 10 buster linuxcnc: /usr/bin/linuxcnc pwd: /home/doug/linuxcnc/configs/sim.qtplasmac USER: doug LOGNAME: doug HOME: /home/doug EDITOR: VISUAL: LANGUAGE: TERM: dumb COLORTERM: DISPLAY: :0.0 DESKTOP: lightdm-xsession display size: 1440x900 pixels (381x238 millimeters) PATH: /usr/bin:/home/doug/linuxcnc/configs/sim.qtplasmac/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games uname items: nodename -n: LinuxCNC-VM kernel-name -s: Linux kernel-vers -v: #1 SMP Debian 4.19.269-1 (2022-12-20) machine -m: x86_64 processor -p: unknown platform -i: unknown oper system -o: GNU/Linux /proc items: cmdline: BOOT_IMAGE=/vmlinuz-4.19.0-23-amd64 root=/dev/mapper/LinuxCNC--VM--vg-root ro initrd=/install/gtk/initrd.gz quiet model name: Intel(R) Core(TM) i7-4980HQ CPU @ 2.80GHz cores: 2 cpu MHz: 2793.532 parport: serial: Versions: gcc: gcc (Debian 8.3.0-6) 8.3.0 python: Python 3.7.3 git: not_in_PATH git commit: NA tcl: 8.6 tk: 8.6 glade: not_in_PATH linuxcnc_var all: LINUXCNCVERSION: 2.10.0-pre0-647-g4e47d1ee7LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcpLINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples REALTIME: /usr/lib/linuxcnc/realtime RTS: uspace HALLIB_DIR: /usr/share/linuxcnc/hallib PYTHON: /usr/bin/python3 dpkg -l '*linuxcnc*':Desired=Unknown/Install/Remove/Purge/Hold| Status=Not/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend|/ Err?=(none)/Reinst-required (Status,Err: uppercase=bad)||/ Name Version Architecture Description+++-===================-============================-============-=====================================================================un linuxcnc <none> <none> (no description available)un linuxcnc-dev <none> <none> (no description available)un linuxcnc-doc <none> <none> (no description available)ii linuxcnc-doc-en 1:2.10.0~pre0.647.g4e47d1ee7 all motion controller for CNC machines and robots (English documentation)ii linuxcnc-doc-es 1:2.10.0~pre0.647.g4e47d1ee7 all controlador de movimiento para máquinas CNC y robots (Español).ii linuxcnc-doc-fr 1:2.10.0~pre0.647.g4e47d1ee7 all motion controller for CNC machines and robots (French documentation)un linuxcnc-sim <none> <none> (no description available)un linuxcnc-sim-dev <none> <none> (no description available)ii linuxcnc-uspace 1:2.10.0~pre0.647.g4e47d1ee7 amd64 motion controller for CNC machines and robotsii linuxcnc-uspace-dev 1:2.10.0~pre0.647.g4e47d1ee7 amd64 PC based motion controller for real-time LinuxPlease Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
22 Jan 2023 21:51 #262680
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
Error report as attachment
Please Log in or Create an account to join the conversation.
- snowgoer540
-

- Offline
- Moderator
-

Less
More
- Posts: 2553
- Thank you received: 887
22 Jan 2023 23:31 - 22 Jan 2023 23:32 #262687
by snowgoer540
Replied by snowgoer540 on topic Running SIM in VM for QTPlasmaC
I'm by no means a Linux expert, but I'm not sure I understand why you've chosen a non-realtime kernel? I am pretty sure it is necessary for the works to... work. I am on MX19.4, but my VM uses the rt kernel:
I'd start by installing the realtime kernel and see if that helps your situation.
mx:~ $ uname -a
Linux mx 4.19.0-23-rt-amd64 #1 SMP PREEMPT RT Debian 4.19.269-1 (2022-12-20) x86_64 GNU/Linux
I'd start by installing the realtime kernel and see if that helps your situation.
Last edit: 22 Jan 2023 23:32 by snowgoer540.
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
22 Jan 2023 23:41 #262688
by phillc54
Replied by phillc54 on topic Running SIM in VM for QTPlasmaC
Have you updated Linux with sudo apt update then sudo apt upgrade.
A sim "should" run fine on a vanilla kernel.
My VmWare Buster VM runs fine with the latest master from the buildbot.
A sim "should" run fine on a vanilla kernel.
My VmWare Buster VM runs fine with the latest master from the buildbot.
Please Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
23 Jan 2023 00:39 - 23 Jan 2023 00:40 #262690
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
re: “ I'm not sure I understand why you've chosen a non-realtime kernel?”
I tried the real-time kernel first and that did not work. I read in another discussion thread here someone saying that when they switched to a non-real-time kernel that LinuxCNC switched and operated in Simulation mode.
I tried the real-time kernel first and that did not work. I read in another discussion thread here someone saying that when they switched to a non-real-time kernel that LinuxCNC switched and operated in Simulation mode.
Last edit: 23 Jan 2023 00:40 by Doug @ Design8Studio.com.
Please Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
23 Jan 2023 00:44 #262691
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
I installed via the ISO (getting 2.8 on Buster on real-time kernel) then added repos to upgrade to 2.10. I started LinuxCNC and chose a SIM mode. Got no success. Tried switching from default GUI to Cinnamon and back. Then tried switching to a non-real-time kernel and back.Have you updated Linux with sudo apt update then sudo apt upgrade.
A sim "should" run fine on a vanilla kernel.
My VmWare Buster VM runs fine with the latest master from the buildbot.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
23 Jan 2023 00:48 #262692
by phillc54
Replied by phillc54 on topic Running SIM in VM for QTPlasmaC
That will only upgrade LinuxCNC, you should also upgrade Linux from a terminal.
Please Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
23 Jan 2023 00:54 #262693
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
ok will give that a go.That will only upgrade LinuxCNC, you should also upgrade Linux from a terminal.
Please Log in or Create an account to join the conversation.
- Doug @ Design8Studio.com
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 131
- Thank you received: 46
23 Jan 2023 04:15 - 23 Jan 2023 04:17 #262705
by Doug @ Design8Studio.com
Replied by Doug @ Design8Studio.com on topic Running SIM in VM for QTPlasmaC
OK, well I updated Linux with sudo apt update then sudo apt upgrade.
I still have no functioning QTPlasma SIM.
Based on the mention of OpenGL in the error, my best uneducated guess is this is a graphics issue.
In Parallels I have the VM's graphics set with 3D acceleration enabled and "Always use high performance graphics" check marked.
OpenGL.error.GLError: GLError(err = 1280,description = b'invalid enumerant',baseOperation = glGenLists,cArguments = (1,),result = 1)
I still have no functioning QTPlasma SIM.
Based on the mention of OpenGL in the error, my best uneducated guess is this is a graphics issue.
In Parallels I have the VM's graphics set with 3D acceleration enabled and "Always use high performance graphics" check marked.
OpenGL.error.GLError: GLError(err = 1280,description = b'invalid enumerant',baseOperation = glGenLists,cArguments = (1,),result = 1)
Last edit: 23 Jan 2023 04:17 by Doug @ Design8Studio.com.
Please Log in or Create an account to join the conversation.
Time to create page: 0.226 seconds