- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- EtherCAT master xml file for Yaskawa Sigma Servo motor?
EtherCAT master xml file for Yaskawa Sigma Servo motor?
- tar_san
- Offline
- Junior Member
-

Less
More
- Posts: 27
- Thank you received: 1
19 Dec 2025 06:25 #340299
by tar_san
EtherCAT master xml file for Yaskawa Sigma Servo motor? was created by tar_san
I'm trying to use Yaskawa sigma servo(EtherCAT) for LinuxCNC.
But my trial does not work.
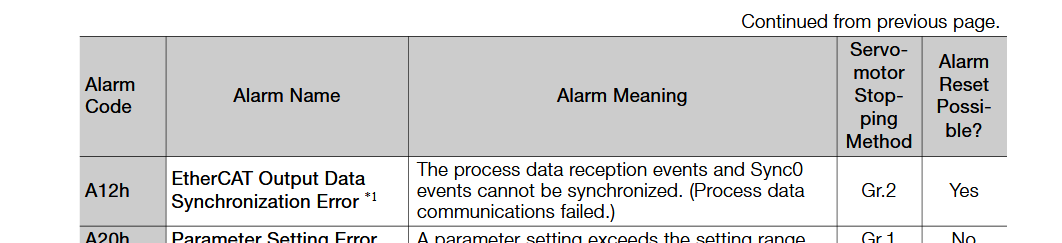
I get Alarm A12 (EtherCAT Output Syncronization Error)
Does anyone know good example master settings ?
my trial
ini
loadusr -W lcec_conf ethercat-conf.xml
ethercat-conf.xml
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1">
<slave idx="0" type="generic" vid="00000539" pid="02200901" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<sdoConfig idx="2701" subIdx="02" ><sdoDataRaw data="00 00 00 04" /></sdoConfig>
<< ERROR.
LCEC: slave 0.0: Failed to execute SDO download( 0x2701:0x02, size4, bite0=0, error -5, abort_code 00000000)
...
But my trial does not work.
I get Alarm A12 (EtherCAT Output Syncronization Error)
Does anyone know good example master settings ?
my trial
ini
loadusr -W lcec_conf ethercat-conf.xml
ethercat-conf.xml
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1">
<slave idx="0" type="generic" vid="00000539" pid="02200901" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<sdoConfig idx="2701" subIdx="02" ><sdoDataRaw data="00 00 00 04" /></sdoConfig>
<< ERROR.
LCEC: slave 0.0: Failed to execute SDO download( 0x2701:0x02, size4, bite0=0, error -5, abort_code 00000000)
...
Please Log in or Create an account to join the conversation.
- Hakan
- Away
- Platinum Member
-

Less
More
- Posts: 1119
- Thank you received: 393
19 Dec 2025 09:36 #340300
by Hakan
Replied by Hakan on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
I think you know this already, but you have the output of "sudo dmesg" with the last lines being relevant.
In this case, do the following commands work "ethercat -p 0 upload 0x2701 2" and "ethercat -p 0 download 0x2701 2 1"?
You are aware that bytes in sdoDataRaw are LSBF so your number "00 00 00 40" is 67108864?
In this case, do the following commands work "ethercat -p 0 upload 0x2701 2" and "ethercat -p 0 download 0x2701 2 1"?
You are aware that bytes in sdoDataRaw are LSBF so your number "00 00 00 40" is 67108864?
Please Log in or Create an account to join the conversation.
- tar_san
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 1
20 Dec 2025 08:21 - 20 Dec 2025 08:21 #340332
by tar_san
Replied by tar_san on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
Yes, 67108864 is Encoder count per round.
The problem is "Alarm A12 (EtherCAT Output Syncronization Error) "
A support person said,
"As long as A12 occurs, servo amp can't anser properly."
The problem is "Alarm A12 (EtherCAT Output Syncronization Error) "
A support person said,
"As long as A12 occurs, servo amp can't anser properly."
Last edit: 20 Dec 2025 08:21 by tar_san.
Please Log in or Create an account to join the conversation.
- Hakan
- Away
- Platinum Member
-
Less
More
- Posts: 1119
- Thank you received: 393
20 Dec 2025 09:18 #340333
by Hakan
Replied by Hakan on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
And what does the last lines in "sudo dmesg" say?
It is the drive that is unhappy, but hopefully the ethercat master tells why it won't download data to an SDO.
Or give another clue.
It is the drive that is unhappy, but hopefully the ethercat master tells why it won't download data to an SDO.
Or give another clue.
Please Log in or Create an account to join the conversation.
- Hakan
- Away
- Platinum Member
-
Less
More
- Posts: 1119
- Thank you received: 393
20 Dec 2025 09:37 #340335
by Hakan
Replied by Hakan on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
I was able to find the manual and some info´about the alarm. Even if there were very few clues in the post
Then you can tryor if you have an old lcec version and syncToRefClock isn't recognized: refClockSyncCycles="-1000"
Check the lcec.0.pll-reset-count variable that it stays on single digit. Read at least one full page here github.com/linuxcnc-ethercat/linuxcnc-et...istributed-clocks.md
Then you can try
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1000" syncToRefClock="true">Check the lcec.0.pll-reset-count variable that it stays on single digit. Read at least one full page here github.com/linuxcnc-ethercat/linuxcnc-et...istributed-clocks.md
Attachments:
Please Log in or Create an account to join the conversation.
- tar_san
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 1
22 Dec 2025 22:41 #340403
by tar_san
Replied by tar_san on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
Thank you so much, Mr. Hakan. I really appreciate your kind reply.
I'm using LinuxCNC 2.9.5 and 3axis machine, and I want to replace servomotors to YASKAwA servo systems. ( I think I can upgrade LinuxCNC to the newest if needed)
Now, I deleted SDO description, but I still get A12 Error. Xml configuration for lcec is very simple. (attached ethercat.xml)
So, EtherCAT basic communication is wrong. ( I have to solve it before SDO error. )
This is sudo dmesg output(dmsg_alarm_a12_2).
I can see a lot of WARNINGS and Errors, but How can I fix these problems for YASKAWA Servo?
I'm using LinuxCNC 2.9.5 and 3axis machine, and I want to replace servomotors to YASKAwA servo systems. ( I think I can upgrade LinuxCNC to the newest if needed)
Now, I deleted SDO description, but I still get A12 Error. Xml configuration for lcec is very simple. (attached ethercat.xml)
So, EtherCAT basic communication is wrong. ( I have to solve it before SDO error. )
This is sudo dmesg output(dmsg_alarm_a12_2).
I can see a lot of WARNINGS and Errors, but How can I fix these problems for YASKAWA Servo?
Please Log in or Create an account to join the conversation.
- Hakan
- Away
- Platinum Member
-
Less
More
- Posts: 1119
- Thank you received: 393
23 Dec 2025 08:16 - 23 Dec 2025 08:17 #340413
by Hakan
Replied by Hakan on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
Hello Mr tar_san,
the output of dmesg was very helpful. We need to fix all issues appearing,
the first one is your drive is a EoE-capable drive. Ethernet over Ethercat.
Unfortunately linuxcnc doesn't support that.
The best way is to disable eoe in the ethercat mastyer.
Remove the installed ethercat master.
Then download ethercat master from the official site
Configure using the --disable-eoe=true option
... and so on, continue to build and configure your system. Instructions are here.
gitlab.com/etherlab.org/ethercat/-/blob/stable-1.6/INSTALL.md
There is another possibility to disable EoE, but that disables EoE in the drive, and I would think
you need EoE for communication with some Yaskawa tuning software. Guessing, but not unlikely.
Test with the new ethercat master, the EoE messages should now be gone.
Let's see how many of the other messages are still there and then we act on them.
Referring to my previous post. Please add on the master line
If syncToRefClock gives an error because it is not supported (yet), use the following syntax:
Note the minus sign.
Let's see how far you come with those modifications. If there are still problems,
please show the output of dmesg again, and any errors from linuxcnc.
the output of dmesg was very helpful. We need to fix all issues appearing,
the first one is your drive is a EoE-capable drive. Ethernet over Ethercat.
Unfortunately linuxcnc doesn't support that.
The best way is to disable eoe in the ethercat mastyer.
Remove the installed ethercat master.
Then download ethercat master from the official site
Configure using the --disable-eoe=true option
git clone https://gitlab.com/etherlab.org/ethercat
./bootstrap
./configure --sysconfdir=/etc --disable-eoe=true
make all modulesgitlab.com/etherlab.org/ethercat/-/blob/stable-1.6/INSTALL.md
There is another possibility to disable EoE, but that disables EoE in the drive, and I would think
you need EoE for communication with some Yaskawa tuning software. Guessing, but not unlikely.
Test with the new ethercat master, the EoE messages should now be gone.
Let's see how many of the other messages are still there and then we act on them.
Referring to my previous post. Please add on the master line
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1" syncToRefClock="true"><master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">Let's see how far you come with those modifications. If there are still problems,
please show the output of dmesg again, and any errors from linuxcnc.
Last edit: 23 Dec 2025 08:17 by Hakan. Reason: bbcode
Please Log in or Create an account to join the conversation.
- tar_san
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 1
23 Dec 2025 23:13 - 23 Dec 2025 23:15 #340441
by tar_san
Replied by tar_san on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
Please correct me if I'm wrong.
I installed LinuxCNC using official image 2.9.4
&
sudo apt install linuxcnc-ethercat
sudo systemctl stop ethercat
sudo systemctl disable ethercat
and I executed the procedures below in home/etherlab directory
git clone gitlab.com/etherlab.org/ethercat
cd ethercat
./bootstrap
./configure --sysconfdir=/etc --disable-eoe=true
I got error message >> error :invalid feature name "eoe=true"
so what I did is ..
./configure --sysconfdir=/etc --disable-eoe
make all modules
Then I followed ---- INSTALL.md (gitlab.com/etherlab.org/ethercat/-/blob/stable-1.6/INSTALL.md)
su make modules_install install
I got error message >> su: user ake does not exist or the user entry does not contain all the required fields.
what should I do ?
I installed LinuxCNC using official image 2.9.4
&
sudo apt install linuxcnc-ethercat
sudo systemctl stop ethercat
sudo systemctl disable ethercat
and I executed the procedures below in home/etherlab directory
git clone gitlab.com/etherlab.org/ethercat
cd ethercat
./bootstrap
./configure --sysconfdir=/etc --disable-eoe=true
I got error message >> error :invalid feature name "eoe=true"
so what I did is ..
./configure --sysconfdir=/etc --disable-eoe
make all modules
Then I followed ---- INSTALL.md (gitlab.com/etherlab.org/ethercat/-/blob/stable-1.6/INSTALL.md)
su make modules_install install
I got error message >> su: user ake does not exist or the user entry does not contain all the required fields.
what should I do ?
Last edit: 23 Dec 2025 23:15 by tar_san.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21083
- Thank you received: 7197
23 Dec 2025 23:18 #340442
by tommylight
sudo make modules_install install
Replied by tommylight on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
trysu make modules_install install
sudo make modules_install install
Please Log in or Create an account to join the conversation.
- tar_san
- Offline
- Junior Member
-
Less
More
- Posts: 27
- Thank you received: 1
24 Dec 2025 00:01 - 24 Dec 2025 00:55 #340445
by tar_san
Replied by tar_san on topic EtherCAT master xml file for Yaskawa Sigma Servo motor?
thank you so much. but I still have a problem.
sudo make modules_install install
sudo depmod
sudo echo KERNEL==\"EtherCAT[0-9]*\", MODE=\"0664\" > /etc/udev/rules.d/99-EtherCAT.rules
I got error>> bash: /etc/udev/rules.d/99-EtherCAT.rules no permission
So I fixed to
echo KERNEL==\"EtherCAT[0-9]*\", MODE=\"0664\" | sudo tee /etc/udev/rules.d/99-EtherCAT.rules
sudo systemctl daemon-reload
sudo systemctl start ethercat
ethercat version
IgH EtherCAT master 1.6.8
ethercat slaves
0 0:0 PREOP + SGDXS-xxxxA0x EtherCAT(CoE) SERVOPACK Rev02.09
and then, I executed LinuxCNC with my simple config.
But nothing has improved.
I attached dmesg.
And then , what I did was.. syncToRefClock="true"
>> I got error, and LinuxCNC did not started.
refClockSyncCycles="-1"
>> I got LinuxCNC Terminal output "Failed to get reference clock time: Input/output error" (20 times )
What am I missing ?
sudo make modules_install install
sudo depmod
sudo echo KERNEL==\"EtherCAT[0-9]*\", MODE=\"0664\" > /etc/udev/rules.d/99-EtherCAT.rules
I got error>> bash: /etc/udev/rules.d/99-EtherCAT.rules no permission
So I fixed to
echo KERNEL==\"EtherCAT[0-9]*\", MODE=\"0664\" | sudo tee /etc/udev/rules.d/99-EtherCAT.rules
sudo systemctl daemon-reload
sudo systemctl start ethercat
ethercat version
IgH EtherCAT master 1.6.8
ethercat slaves
0 0:0 PREOP + SGDXS-xxxxA0x EtherCAT(CoE) SERVOPACK Rev02.09
and then, I executed LinuxCNC with my simple config.
But nothing has improved.
I attached dmesg.
And then , what I did was.. syncToRefClock="true"
>> I got error, and LinuxCNC did not started.
refClockSyncCycles="-1"
>> I got LinuxCNC Terminal output "Failed to get reference clock time: Input/output error" (20 times )
What am I missing ?
Last edit: 24 Dec 2025 00:55 by tar_san.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- EtherCAT master xml file for Yaskawa Sigma Servo motor?
Time to create page: 0.145 seconds