Search Results (Searched for: raspberry)
- rodw

15 Jan 2025 21:53
Replied by rodw on topic Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Category: Installing LinuxCNC
- gene_weber

15 Jan 2025 20:38 - 16 Jan 2025 14:32
Replied by gene_weber on topic Raspberry Pi OS PREEMPT RT 6.13 Kernel Cookbook
Raspberry Pi OS PREEMPT RT 6.13 Kernel Cookbook
Category: Installing LinuxCNC
- gene_weber
15 Jan 2025 20:36 - 16 Jan 2025 13:53
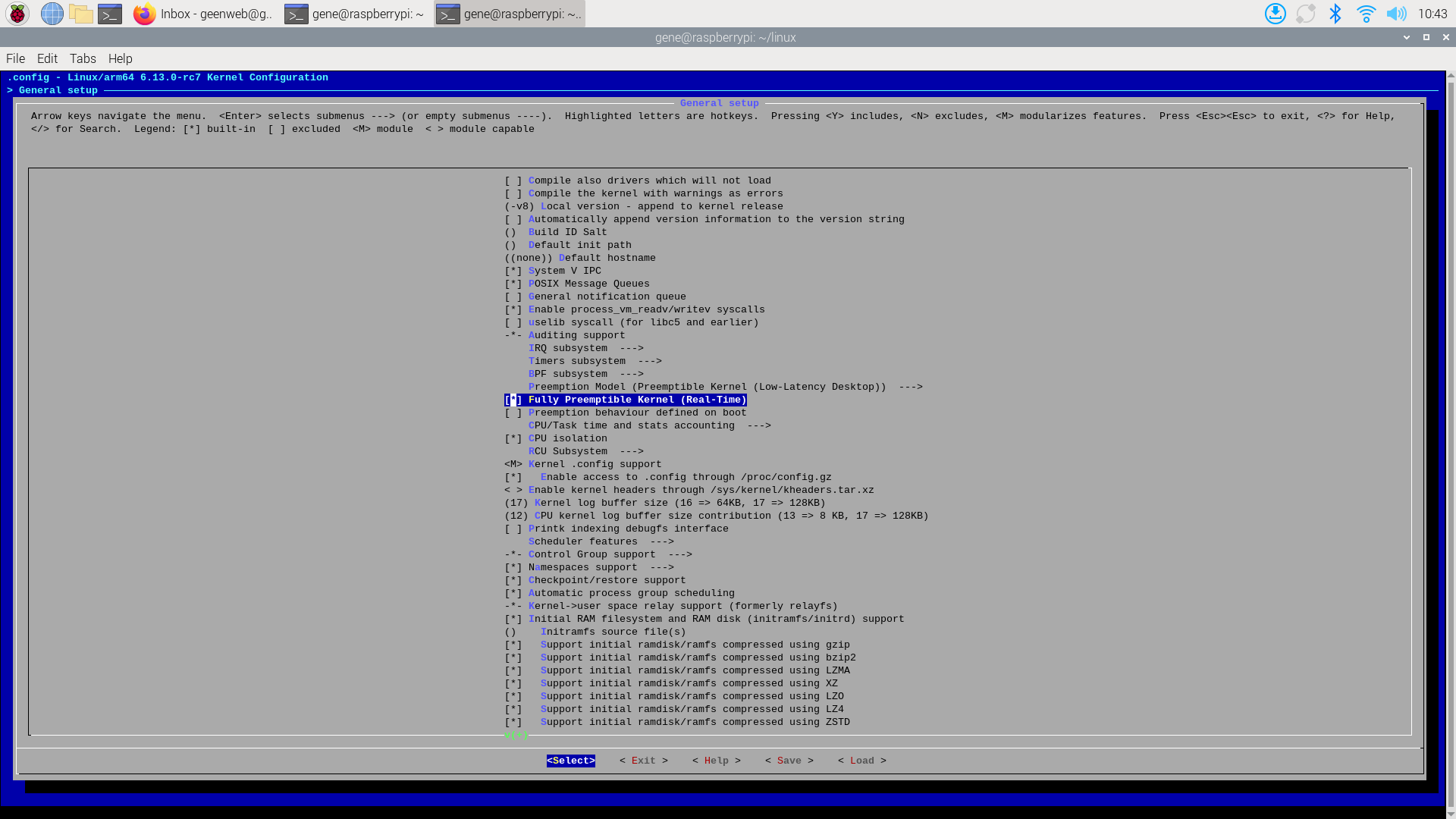
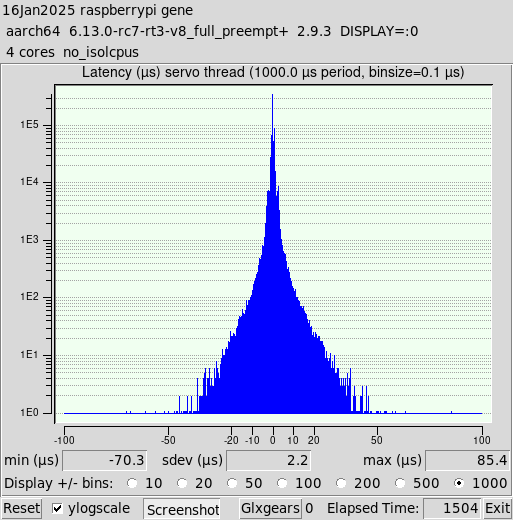
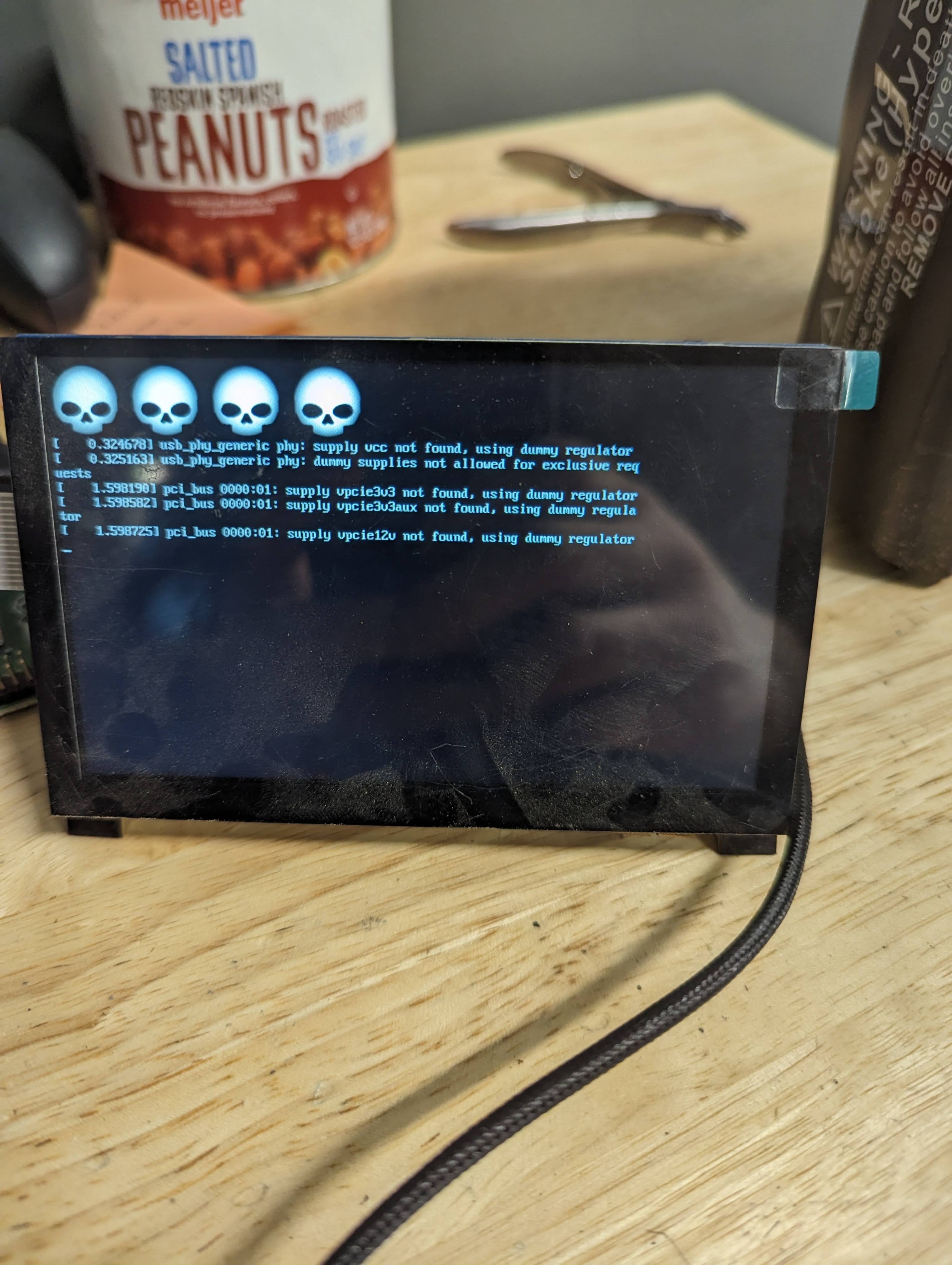
Raspberry Pi OS PREEMPT RT 6.13 Kernel Cookbook was created by gene_weber
Raspberry Pi OS PREEMPT RT 6.13 Kernel Cookbook
Category: Installing LinuxCNC
- R0ttencandy
- R0ttencandy
15 Jan 2025 17:22 - 15 Jan 2025 18:00
Replied by R0ttencandy on topic Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Category: Installing LinuxCNC
- Cant do this anymore bye all

14 Jan 2025 16:30
Replied by Cant do this anymore bye all on topic Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Category: Installing LinuxCNC
- PopBang
- PopBang
14 Jan 2025 15:39
Replied by PopBang on topic Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Linuxcnc 2.9.2 and 2.93 images for Raspberry Pi 4b & 5
Category: Installing LinuxCNC
- TomAlborough

13 Jan 2025 23:59
Replied by TomAlborough on topic RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
Category: Installing LinuxCNC
- TomAlborough
13 Jan 2025 21:42
Replied by TomAlborough on topic RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
Category: Installing LinuxCNC
- PopBang
- PopBang
13 Jan 2025 10:32
Replied by PopBang on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Cant do this anymore bye all
13 Jan 2025 03:35
Replied by Cant do this anymore bye all on topic I've managed to brick two Pi5's trying to install the Bookworm 2.9.3 image.
I've managed to brick two Pi5's trying to install the Bookworm 2.9.3 image.
Category: Installing LinuxCNC
- peterdownunder
- peterdownunder
13 Jan 2025 01:09
Replied by peterdownunder on topic Jog not working on new install
Jog not working on new install
Category: Plasmac
- car_nut
- car_nut
12 Jan 2025 23:27
G3 command ignores and resets M67 feedrate? was created by car_nut
G3 command ignores and resets M67 feedrate?
Category: Plasmac
- royka
- royka
12 Jan 2025 12:36 - 12 Jan 2025 13:32
Replied by royka on topic Real-time kerel not detected on patched 6.12
Real-time kerel not detected on patched 6.12
Category: General LinuxCNC Questions
- alangibson
- alangibson
12 Jan 2025 09:36
Replied by alangibson on topic RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
RPi 5 with 6.12 PREEMPT_RT = Using POSIX non-realtime
Category: Installing LinuxCNC
- Cant do this anymore bye all
12 Jan 2025 04:53
Replied by Cant do this anymore bye all on topic Real-time kerel not detected on patched 6.12
Real-time kerel not detected on patched 6.12
Category: General LinuxCNC Questions
Time to create page: 0.832 seconds