Search Results (Searched for: )
- Lcvette

07 Mar 2025 16:53
Replied by Lcvette on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
- Lcvette
07 Mar 2025 16:49
Replied by Lcvette on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
- Ismacr63
- Ismacr63
07 Mar 2025 16:38
Replied by Ismacr63 on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
- Todd Zuercher

07 Mar 2025 16:36
Replied by Todd Zuercher on topic Custom mcodes
Custom mcodes
Category: O Codes (subroutines) and NGCGUI
- jtrantow
- jtrantow
07 Mar 2025 16:34
Replied by jtrantow on topic Lathe spindle index only?
Lathe spindle index only?
Category: Basic Configuration
- Aciera

07 Mar 2025 16:19
Replied by Aciera on topic Qtvcp Development Discussions
Qtvcp Development Discussions
Category: Qtvcp
- jtrantow
- jtrantow
07 Mar 2025 16:13 - 07 Mar 2025 16:15
Replied by jtrantow on topic Lathe spindle index only?
Lathe spindle index only?
Category: Basic Configuration

- TangentAudio
- TangentAudio
07 Mar 2025 16:12 - 07 Mar 2025 16:34
Replied by TangentAudio on topic Qtvcp Development Discussions
Qtvcp Development Discussions
Category: Qtvcp
- Lcvette
07 Mar 2025 16:11
Replied by Lcvette on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
- TangentAudio
- TangentAudio
07 Mar 2025 16:08 - 07 Mar 2025 16:17
Replied by TangentAudio on topic Qtvcp Development Discussions
Qtvcp Development Discussions
Category: Qtvcp
- Lcvette
07 Mar 2025 16:08
Replied by Lcvette on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
- jtrantow
- jtrantow
07 Mar 2025 15:48
Replied by jtrantow on topic Lathe spindle index only?
Lathe spindle index only?
Category: Basic Configuration
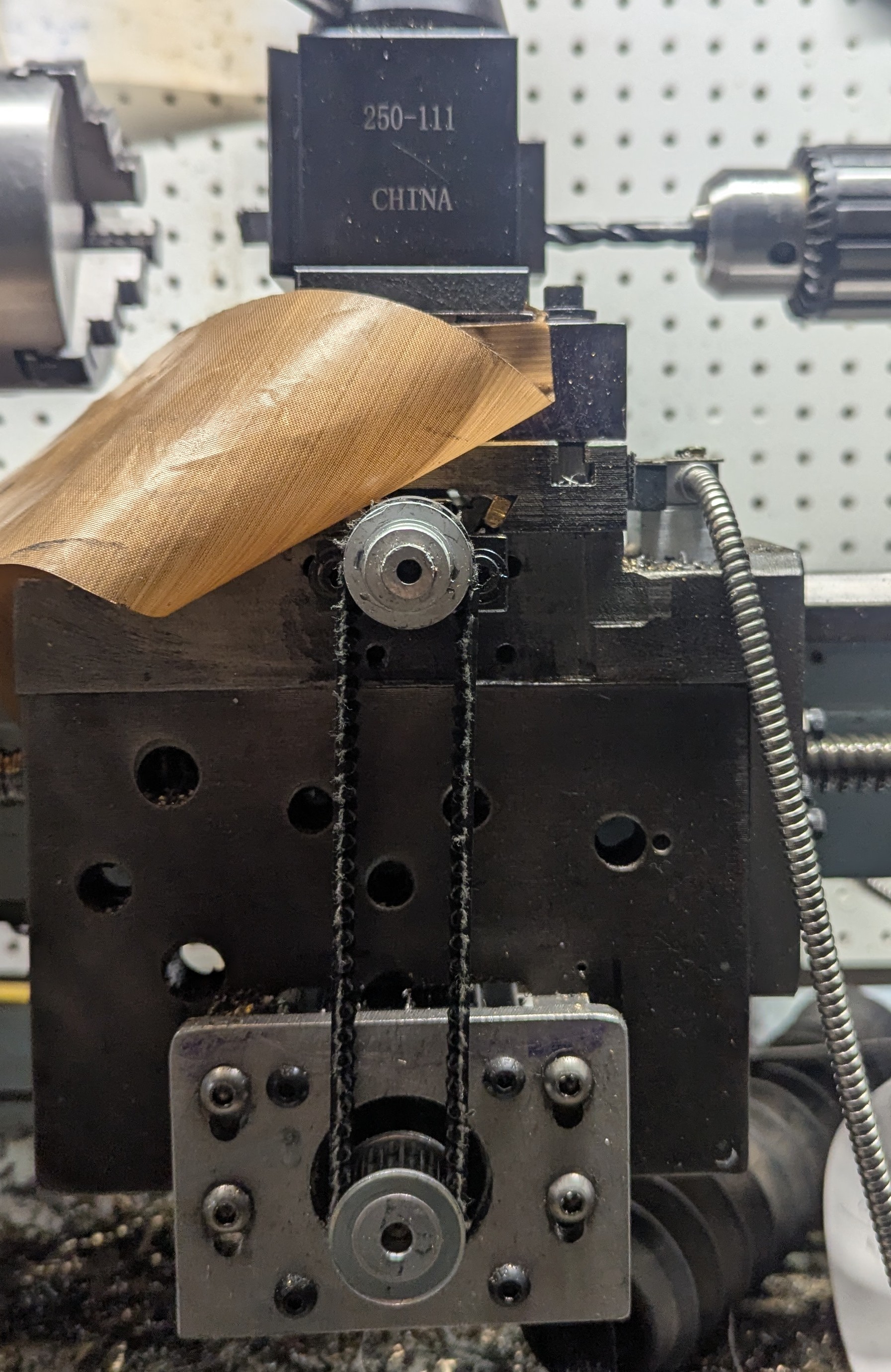
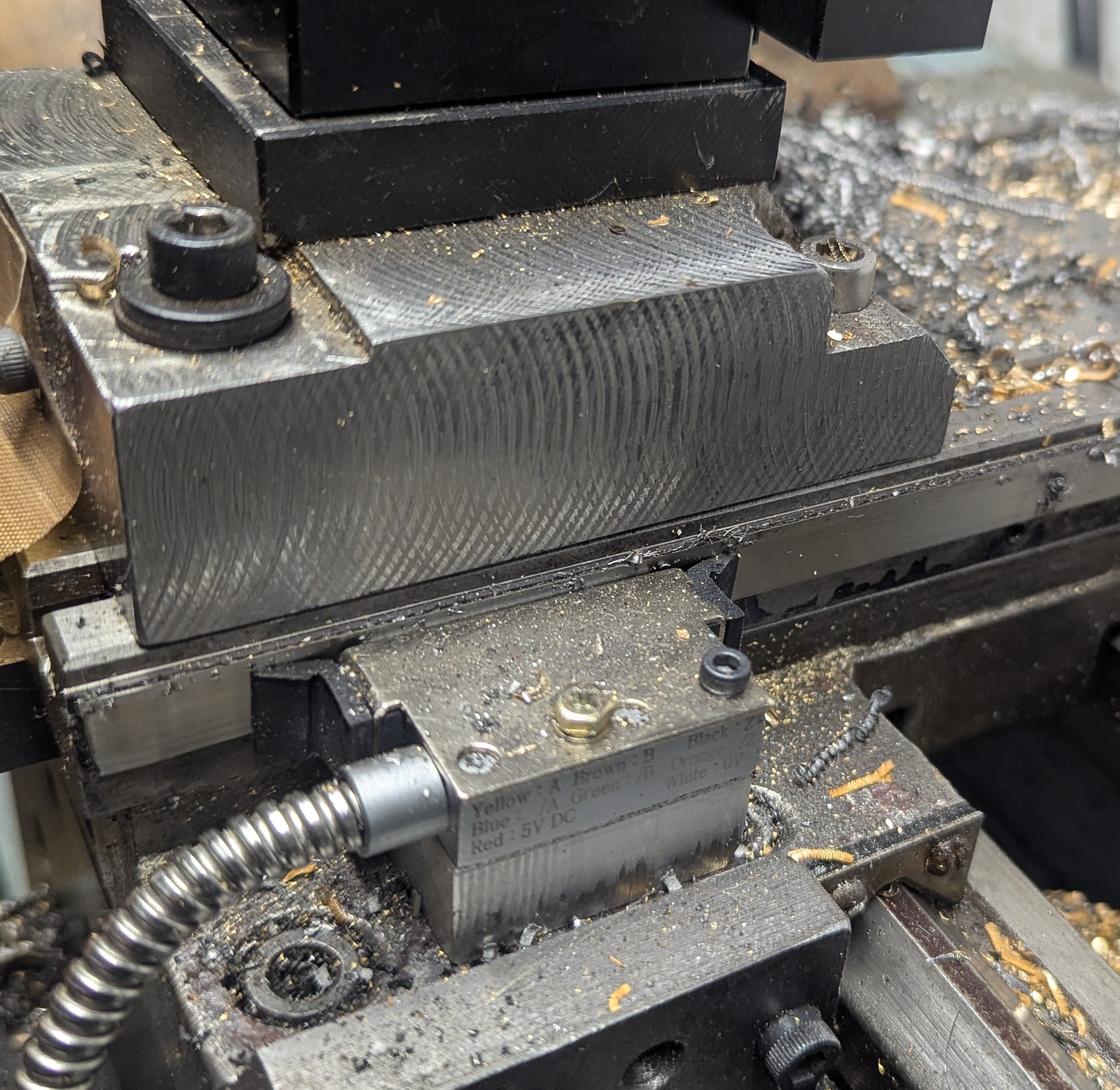
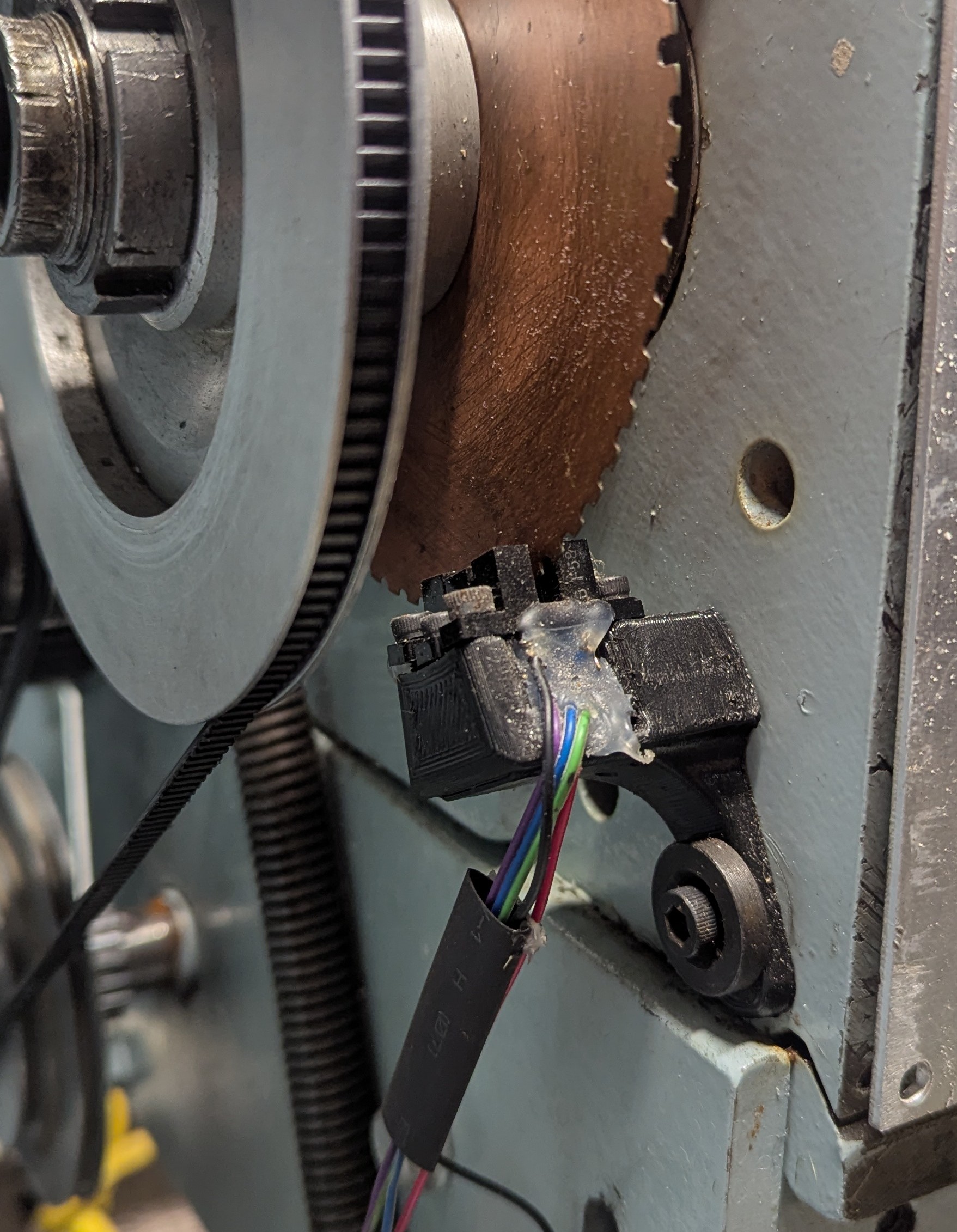
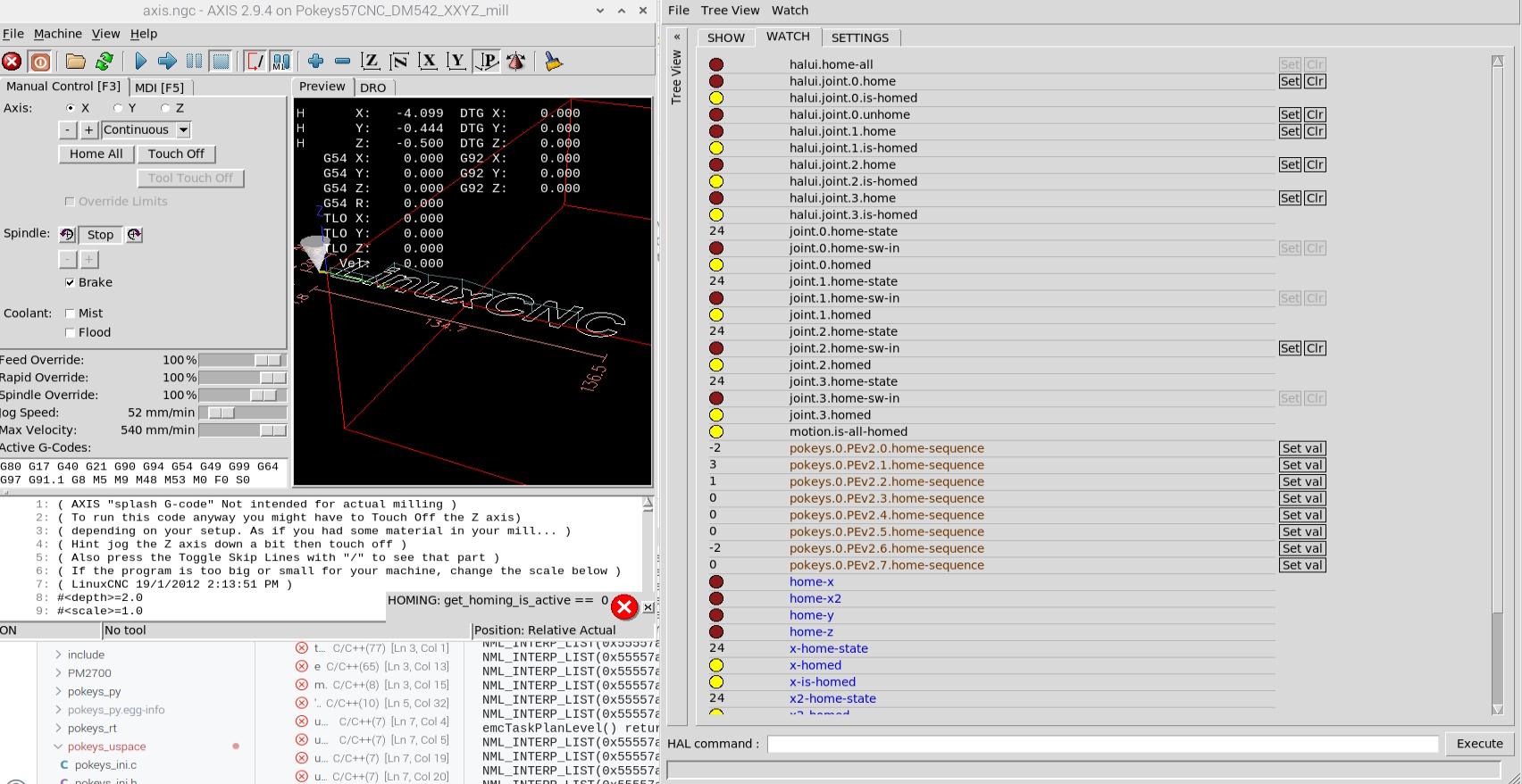
- zarfld
- zarfld
07 Mar 2025 15:37
Replied by zarfld on topic Pokeys_homecomp EncoderSearch / Encoder Arm Topic: Pos_Fb Following errors
Pokeys_homecomp EncoderSearch / Encoder Arm Topic: Pos_Fb Following errors
Category: HAL

- esmurf
- esmurf
07 Mar 2025 15:37
ethercat driver crashes linux kernel was created by esmurf
ethercat driver crashes linux kernel
Category: EtherCAT
- Ismacr63
- Ismacr63
07 Mar 2025 15:31
Replied by Ismacr63 on topic No Keyboard jog after update 2.9.3 to 2.9.4
No Keyboard jog after update 2.9.3 to 2.9.4
Category: QtPyVCP
Time to create page: 0.413 seconds