Search Results (Searched for: )
- meister
- meister
27 Jun 2024 11:30 - 27 Jun 2024 11:42
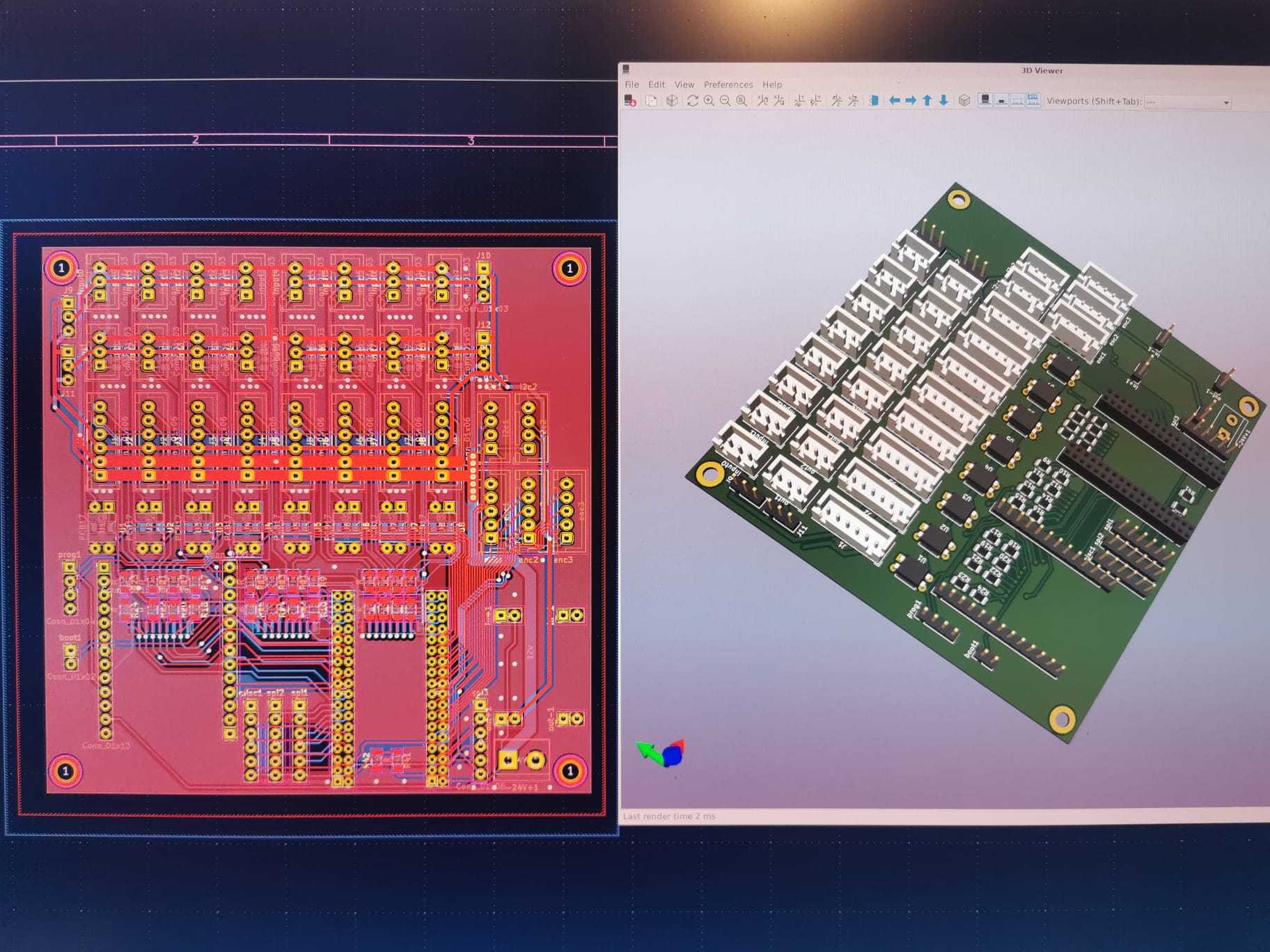
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all

27 Jun 2024 11:21
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all
27 Jun 2024 11:16
Replied by Cant do this anymore bye all on topic Install LinuxCNC On ARM64
Install LinuxCNC On ARM64
Category: Installing LinuxCNC
- Donb9261

27 Jun 2024 10:57
- meister
- meister
27 Jun 2024 10:49 - 27 Jun 2024 10:51
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all
27 Jun 2024 10:44
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all
27 Jun 2024 10:38
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all
27 Jun 2024 09:17
Replied by Cant do this anymore bye all on topic Install LinuxCNC On ARM64
Install LinuxCNC On ARM64
Category: Installing LinuxCNC
- meister
- meister
27 Jun 2024 09:12 - 27 Jun 2024 10:50
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- ihavenofish
- ihavenofish
27 Jun 2024 08:07
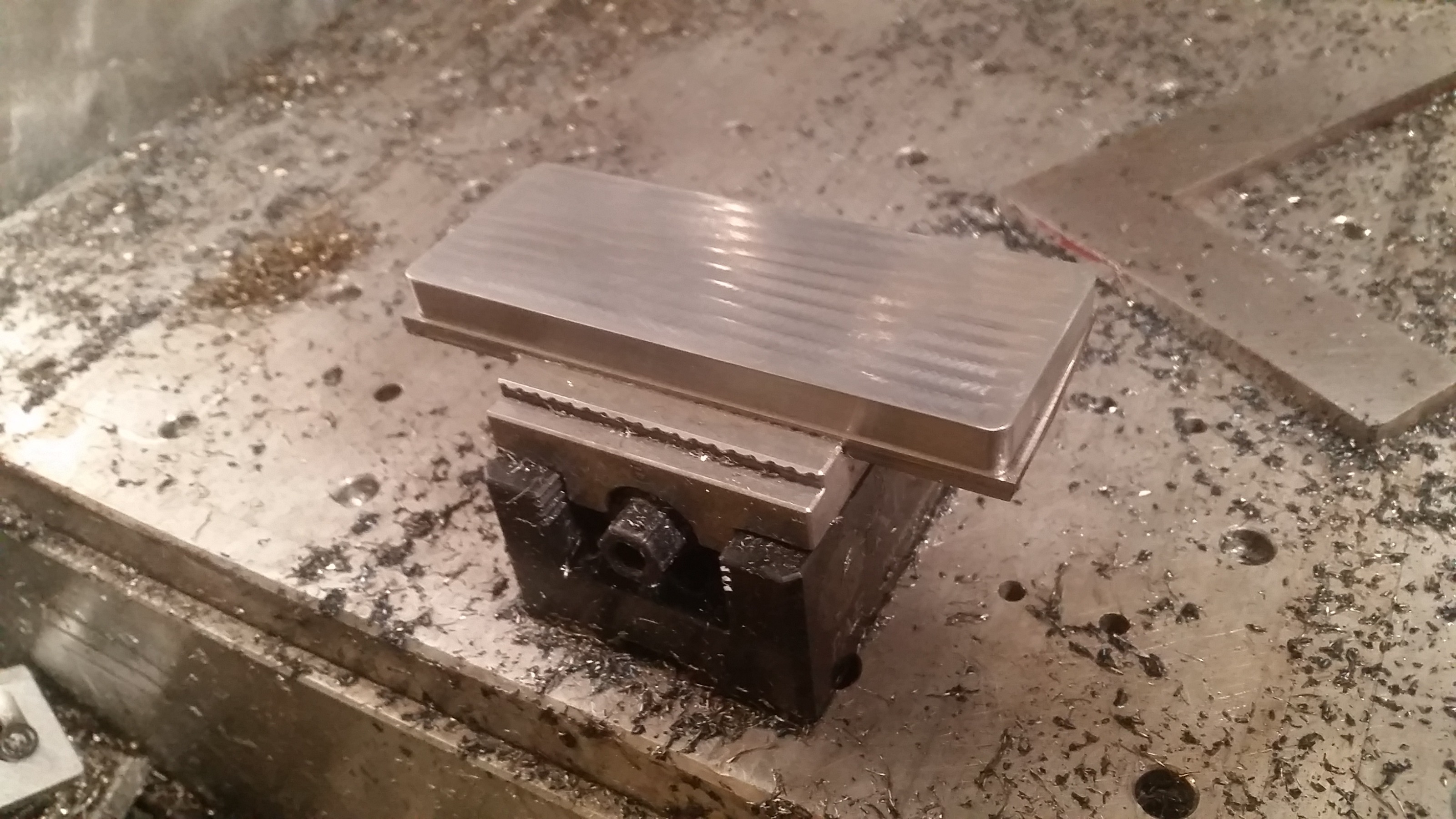
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines

- ihavenofish
- ihavenofish
27 Jun 2024 07:39 - 27 Jun 2024 07:43
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines
- CTB_le123

27 Jun 2024 07:02
Install LinuxCNC On ARM64 was created by CTB_le123
Install LinuxCNC On ARM64
Category: Installing LinuxCNC
- Mr. Mass

27 Jun 2024 06:51
Replied by Mr. Mass on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines
- Cant do this anymore bye all
27 Jun 2024 06:00
Replied by Cant do this anymore bye all on topic when an inch isn't
when an inch isn't
Category: Installing LinuxCNC
- Cant do this anymore bye all
27 Jun 2024 05:58
Replied by Cant do this anymore bye all on topic when an inch isn't
when an inch isn't
Category: Installing LinuxCNC
Time to create page: 0.840 seconds