Search Results (Searched for: )
- JuFu
- JuFu
18 Feb 2025 19:19
gmoccapy - tool change and edge finder do not work was created by JuFu
gmoccapy - tool change and edge finder do not work
Category: Gmoccapy
- webbyguy
- webbyguy
18 Feb 2025 19:15
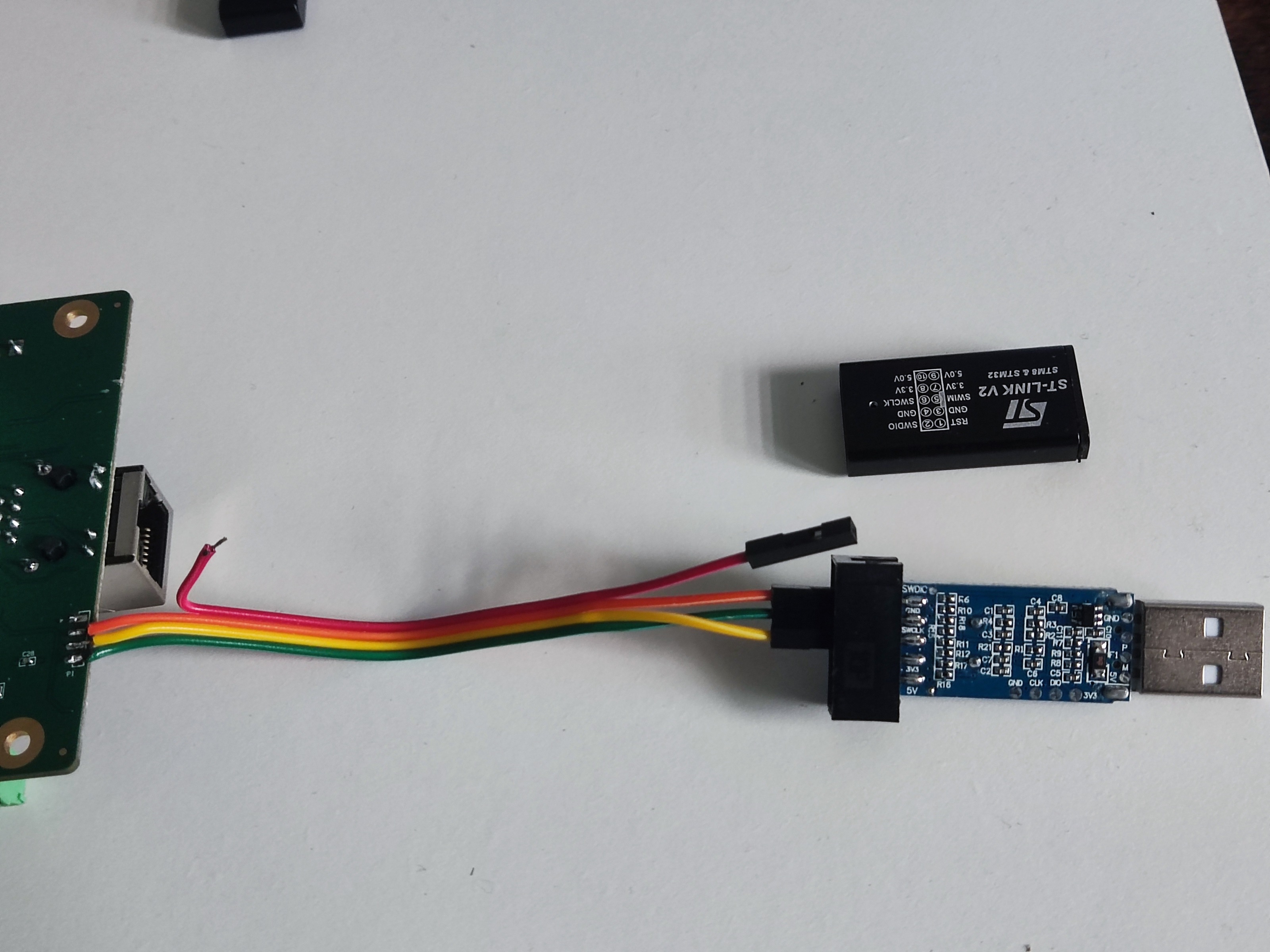
Replied by webbyguy on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- fziepiela
- fziepiela
18 Feb 2025 19:13
Replied by fziepiela on topic SOLVED Cant run created stepwizard file
SOLVED Cant run created stepwizard file
Category: General LinuxCNC Questions
- denhen89

18 Feb 2025 19:09


- Tniejadek
- Tniejadek
18 Feb 2025 19:06
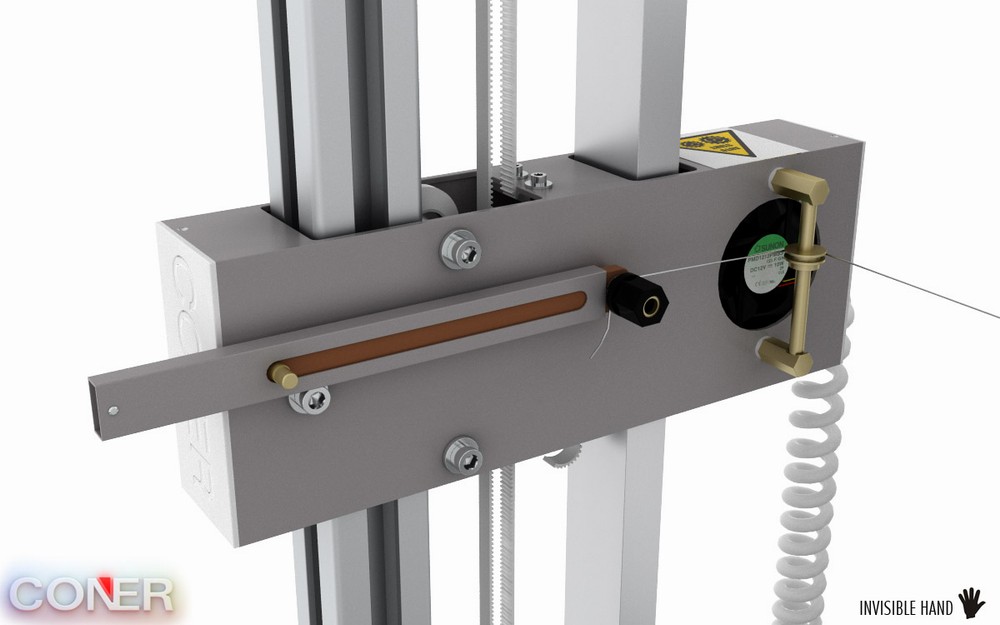
Replied by Tniejadek on topic hot wire cutting
hot wire cutting
Category: General LinuxCNC Questions

- tommylight

18 Feb 2025 18:46
Replied by tommylight on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- webbyguy
- webbyguy
18 Feb 2025 18:32
Replied by webbyguy on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- royka
- royka
18 Feb 2025 18:14 - 18 Feb 2025 22:21
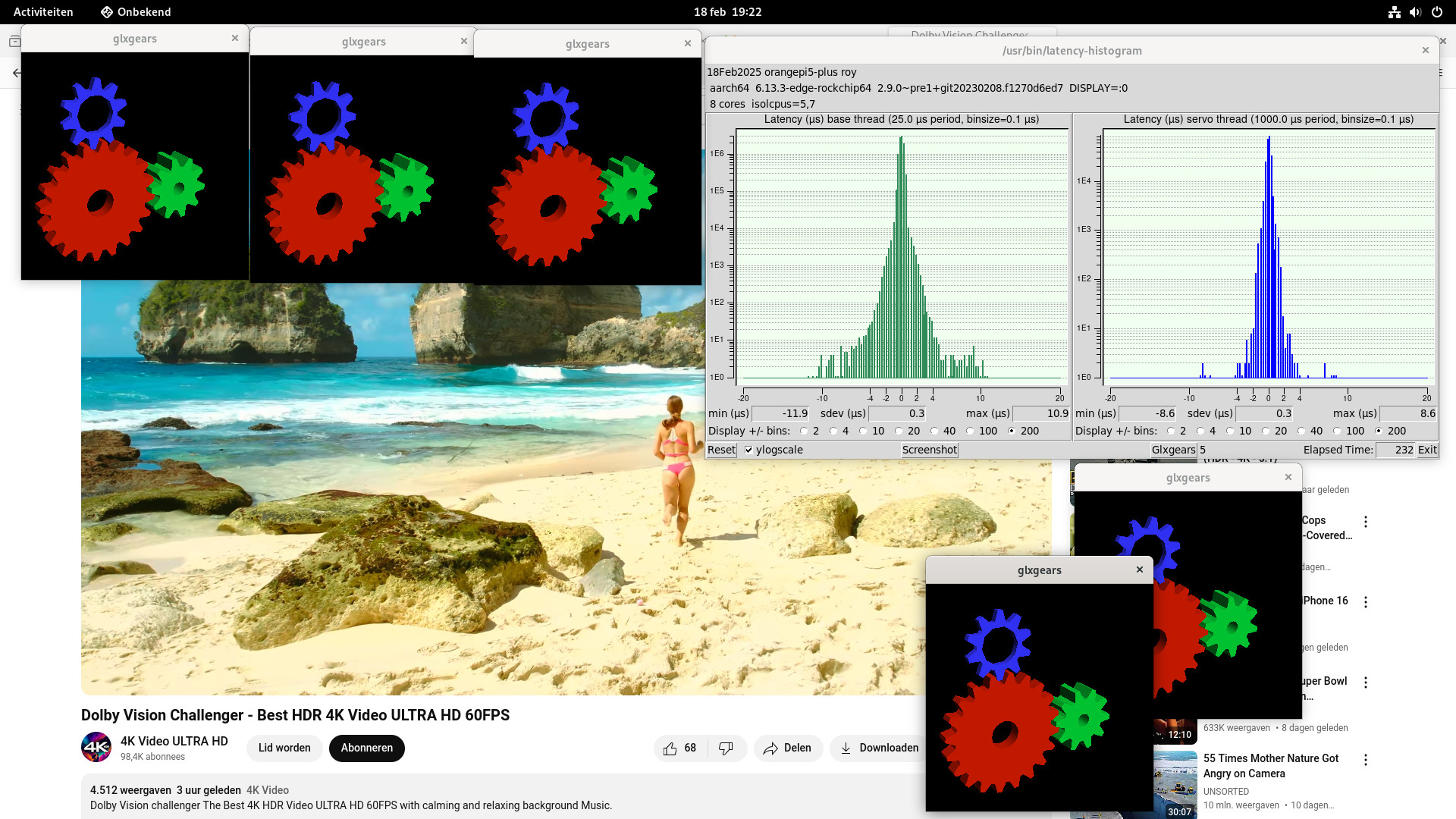
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- beauxnez
- beauxnez
18 Feb 2025 17:57
Replied by beauxnez on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- JT

18 Feb 2025 17:48
Replied by JT on topic Replacing Anilam 5000M - Recomendations?
Replacing Anilam 5000M - Recomendations?
Category: General LinuxCNC Questions
- tommylight
18 Feb 2025 16:34
- chowderhead
- chowderhead
18 Feb 2025 15:54
Replied by chowderhead on topic Replacing Anilam 5000M - Recomendations?
Replacing Anilam 5000M - Recomendations?
Category: General LinuxCNC Questions
- denhen89
18 Feb 2025 14:56
- Meichinger
- Meichinger
18 Feb 2025 14:50 - 18 Feb 2025 15:03
Replied by Meichinger on topic systematic drift on arcs
systematic drift on arcs
Category: General LinuxCNC Questions
Time to create page: 0.459 seconds