Search Results (Searched for: )
- unknown
- unknown
18 Feb 2025 09:15
- Aciera

18 Feb 2025 08:52
Replied by Aciera on topic problem reading ini file xhc-hb04-cfg
problem reading ini file xhc-hb04-cfg
Category: HAL
- 3404gerber
- 3404gerber
18 Feb 2025 08:30
Replied by 3404gerber on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- Aciera
18 Feb 2025 08:28
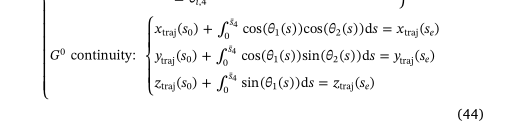
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- denhen89

18 Feb 2025 07:53
- Aciera
18 Feb 2025 07:40 - 18 Feb 2025 08:14
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- jefsaro

18 Feb 2025 07:17
problem reading ini file xhc-hb04-cfg was created by jefsaro
problem reading ini file xhc-hb04-cfg
Category: HAL
- MohammedSobh
- MohammedSobh
18 Feb 2025 06:28
Creating pulses through parallel port was created by MohammedSobh
Creating pulses through parallel port
Category: General LinuxCNC Questions
- xenon-alien

18 Feb 2025 05:56 - 18 Feb 2025 06:02
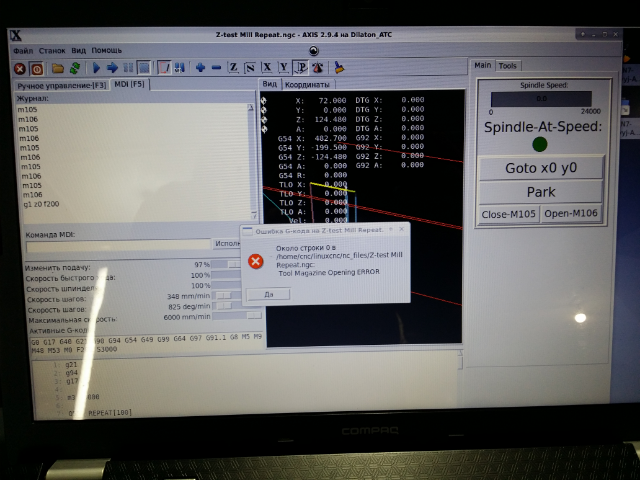
Replied by xenon-alien on topic Carousel with step motor
Carousel with step motor
Category: Advanced Configuration
- Tniejadek
- Tniejadek
18 Feb 2025 05:41
Replied by Tniejadek on topic hot wire cutting
hot wire cutting
Category: General LinuxCNC Questions
- onceloved

18 Feb 2025 05:17
Replied by onceloved on topic Vscode gcode highlight and formatter, with subroutine support
Vscode gcode highlight and formatter, with subroutine support
Category: O Codes (subroutines) and NGCGUI
- tftmarco0

18 Feb 2025 03:53
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- rodw

18 Feb 2025 03:45
Replied by rodw on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- tftmarco0
18 Feb 2025 03:18
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- DougM
- DougM
18 Feb 2025 02:40
CamBam 3D profile 2-way passes? was created by DougM
CamBam 3D profile 2-way passes?
Category: Post Processors
Time to create page: 0.435 seconds