Search Results (Searched for: )
- greg23_78
- greg23_78
02 Jun 2025 22:07 - 02 Jun 2025 22:09
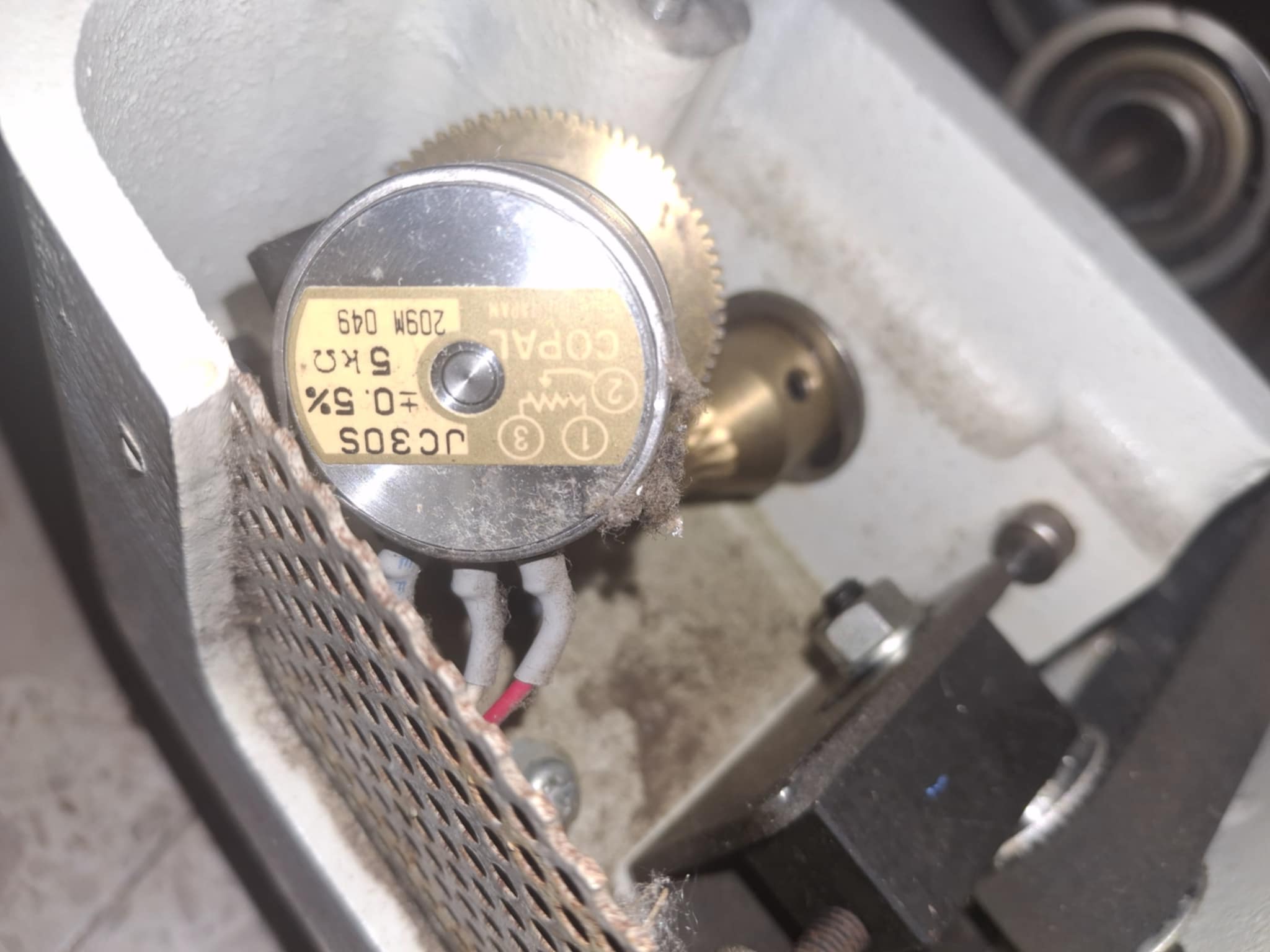
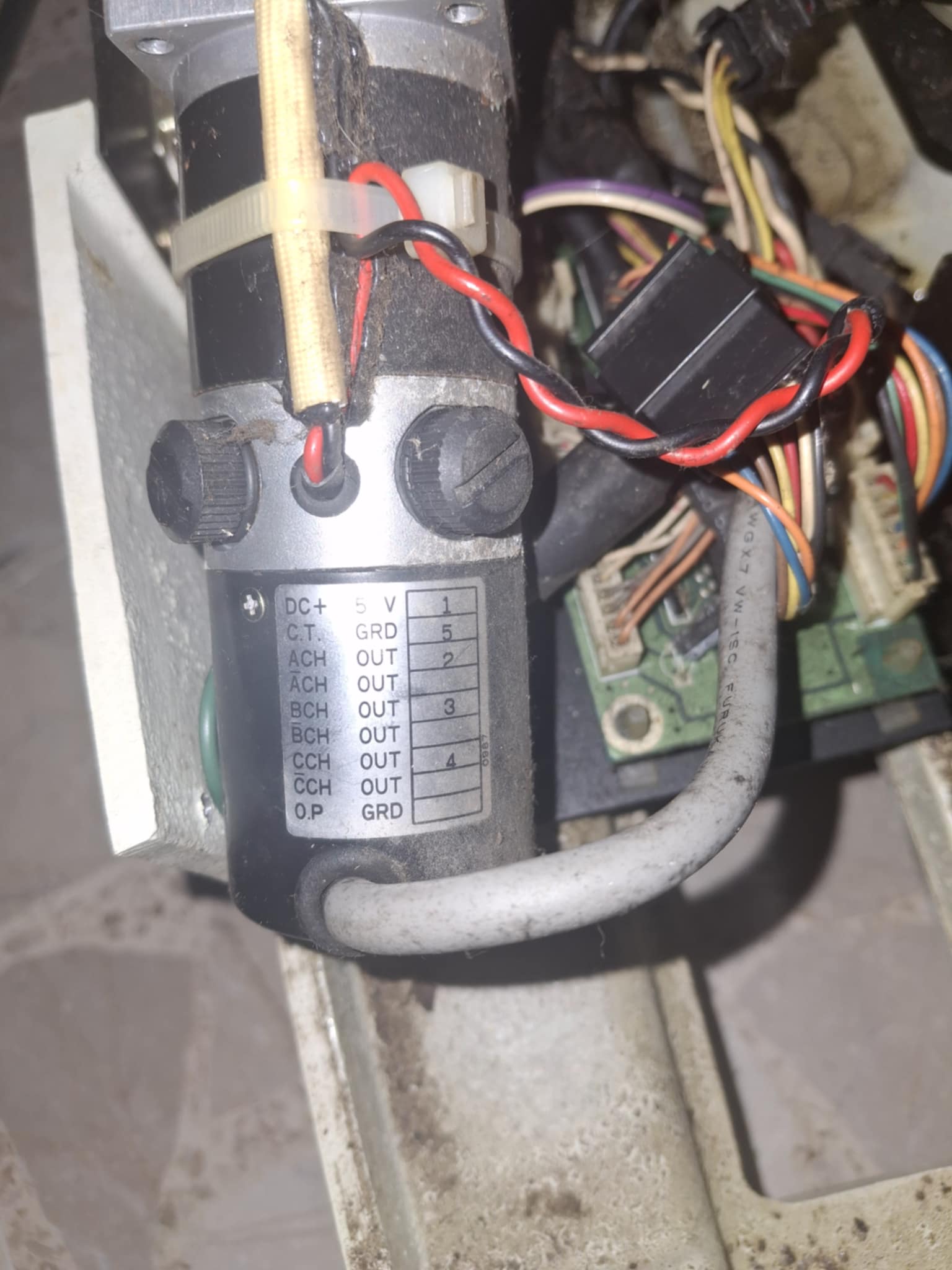
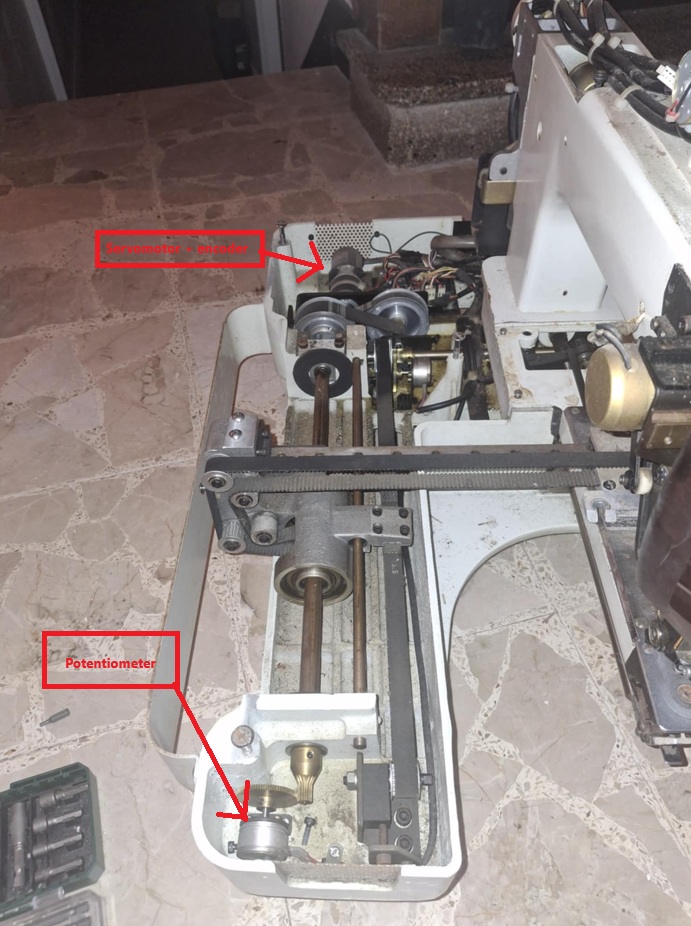
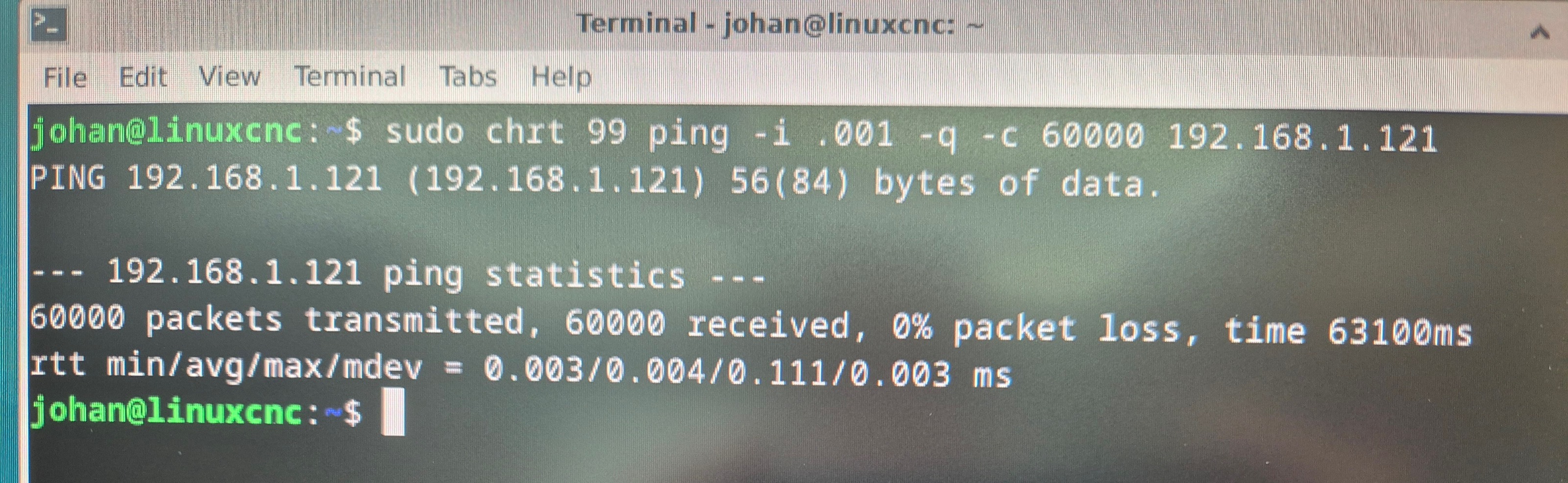
Toyota embroidery machine - retrofit was created by greg23_78
Toyota embroidery machine - retrofit
Category: CNC Machines


- richcolvin

02 Jun 2025 22:04
Getting Started with GladeVCP was created by richcolvin
Getting Started with GladeVCP
Category: AXIS
- PCW

02 Jun 2025 21:38
Replied by PCW on topic Mesa card issues Maho MH800E Retrofit Project
Mesa card issues Maho MH800E Retrofit Project
Category: Computers and Hardware
- Cooped-Up
- Cooped-Up
02 Jun 2025 20:51
Replied by Cooped-Up on topic Mesa card issues Maho MH800E Retrofit Project
Mesa card issues Maho MH800E Retrofit Project
Category: Computers and Hardware
- theoneandonlyoreo
- theoneandonlyoreo
02 Jun 2025 20:30 - 03 Jun 2025 21:51
Replied by theoneandonlyoreo on topic EasyProbe + PGFUN 3D probe
EasyProbe + PGFUN 3D probe
Category: General LinuxCNC Questions
- PCW
02 Jun 2025 20:24
- Tom369
- Tom369
02 Jun 2025 20:07
- Tom369
- Tom369
02 Jun 2025 20:05
- poesel
- poesel
02 Jun 2025 19:44
Replied by poesel on topic Position: relative expected
Position: relative expected
Category: General LinuxCNC Questions
- PCW
02 Jun 2025 18:20
Replied by PCW on topic LinuxCNC compatible industrial PC
LinuxCNC compatible industrial PC
Category: Computers and Hardware
- Todd Zuercher

02 Jun 2025 17:45
Replied by Todd Zuercher on topic LinuxCNC Dual-Head Gantry Setup Assistance Request
LinuxCNC Dual-Head Gantry Setup Assistance Request
Category: General LinuxCNC Questions
- workshop54
- workshop54
02 Jun 2025 17:42
Replied by workshop54 on topic LinuxCNC compatible industrial PC
LinuxCNC compatible industrial PC
Category: Computers and Hardware
- Kieran
- Kieran
02 Jun 2025 16:39 - 02 Jun 2025 16:42
Replied by Kieran on topic GUI that somewhat resembles haas or fanuc workflow.
GUI that somewhat resembles haas or fanuc workflow.
Category: General LinuxCNC Questions
 I wonder if itd be worth making a custom keyboard and special mapping some keys. QTdragon looks nice. I may give it a try.
I wonder if itd be worth making a custom keyboard and special mapping some keys. QTdragon looks nice. I may give it a try. - workshop54
- workshop54
02 Jun 2025 16:29
Replied by workshop54 on topic LinuxCNC compatible industrial PC
LinuxCNC compatible industrial PC
Category: Computers and Hardware
- theoneandonlyoreo
- theoneandonlyoreo
02 Jun 2025 15:42
Replied by theoneandonlyoreo on topic Sequential Serial Numbers
Sequential Serial Numbers
Category: Mill Library
Time to create page: 0.289 seconds