Search Results (Searched for: )
- AkkiSan
- AkkiSan
04 Aug 2025 18:13
Replied by AkkiSan on topic RPi5 and 7C81, manual control is choppy
RPi5 and 7C81, manual control is choppy
Category: Basic Configuration
- small panda
- small panda
04 Aug 2025 17:57
Replied by small panda on topic Linux_Mint_22.1_LinuxCNC_2.10.iso
Linux_Mint_22.1_LinuxCNC_2.10.iso
Category: Installing LinuxCNC
- PCW

04 Aug 2025 17:51 - 04 Aug 2025 17:51
Replied by PCW on topic RPi5 and 7C81, manual control is choppy
RPi5 and 7C81, manual control is choppy
Category: Basic Configuration
- Lcvette

04 Aug 2025 17:46
Replied by Lcvette on topic "KeyError" suddenly appears after moving a limitswitch
"KeyError" suddenly appears after moving a limitswitch
Category: QtPyVCP
- AkkiSan
- AkkiSan
04 Aug 2025 17:37
Replied by AkkiSan on topic RPi5 and 7C81, manual control is choppy
RPi5 and 7C81, manual control is choppy
Category: Basic Configuration
- Lcvette
04 Aug 2025 17:30
- DauntlessA
- DauntlessA
04 Aug 2025 17:22
Replied by DauntlessA on topic Probe tripped during non-probe move deadlock
Probe tripped during non-probe move deadlock
Category: General LinuxCNC Questions
- tommylight

04 Aug 2025 17:15
Replied by tommylight on topic prevent jog limit error
prevent jog limit error
Category: General LinuxCNC Questions
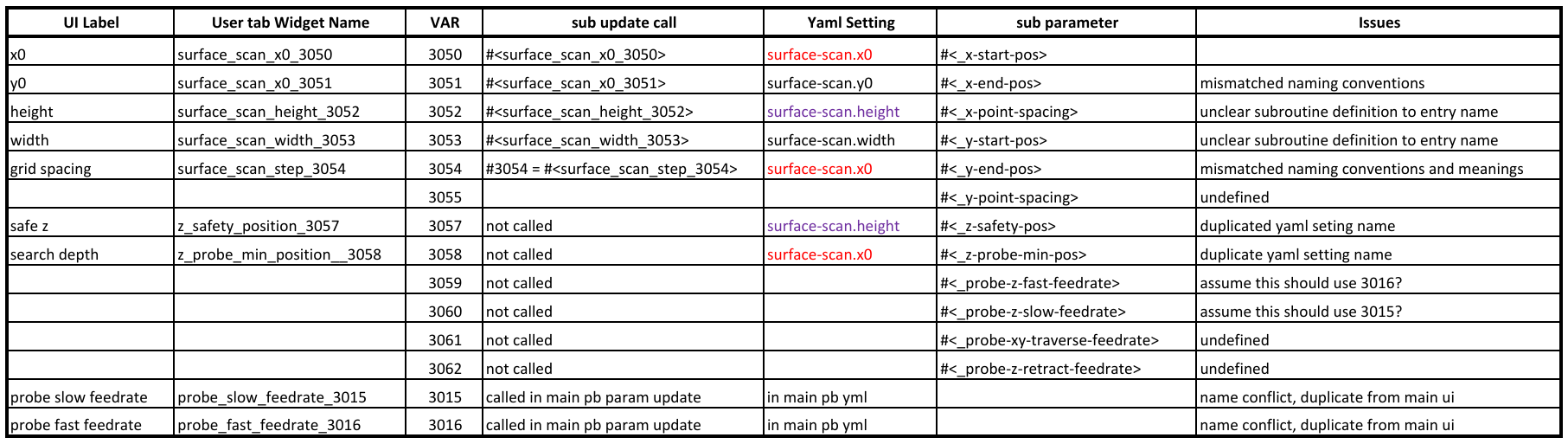
- Lcvette
04 Aug 2025 16:42
Replied by Lcvette on topic Surfacemap Z compensation with Probe Basic
Surfacemap Z compensation with Probe Basic
Category: QtPyVCP
- Benb

04 Aug 2025 16:01
Replied by Benb on topic Switch relay in a defined x position
Switch relay in a defined x position
Category: Advanced Configuration
Time to create page: 0.734 seconds